





Yahboom ROS-WiFi ESP32-S3 2MP 相機模組,適用於 ROS2 機器人,microROS WiFi-UDP 無線影像傳輸
Yahboom ROS-WiFi ESP32-S3 2MP 相機模組,適用於 ROS2 機器人,microROS WiFi-UDP 無線影像傳輸
Yahboom
無法載入取貨服務供應情況
概述
此 ROS-WiFi 相機模組(相機模組產品類型)集成了 ESP32-S3 晶片、2MP 相機和黑色 3D 打印外殼,用於 ROS2 機器人的無線圖像傳輸。可以通過串口模組配置 WiFi 網絡信息,以實現同一局域網內更流暢的無線圖像傳輸。使用 microROS 協議,該模組向運行 ROS2 的主機計算機提供實時圖像數據,支持 AI 視覺識別應用。
注意: 在使用此模組之前,請按照 Yahboom 教程手動配置以連接到家庭或辦公環境中的 WiFi 網絡。
主要特點
- 內置 ESP32-S3 解決方案;支持 2.4GHz 頻段 WiFi 無線傳輸和實時視頻圖像傳輸。
- 2MP 高清相機,提供清晰成像。
- 貼片天線設計增強信號穩定性;支持傳輸視頻圖像達到 20M。
- 用於ROS2開發的無線視頻傳輸和ROS圖像傳輸解決方案。
- 通過串口模塊進行WiFi配置;支持WiFi連接+熱點模式。
- 支持WiFi-UDP模式;將圖像傳輸模塊和機器人連接到虛擬機的WiFi-UDP代理後,虛擬機可以訂閱由圖像傳輸模塊和機器人發布的主題。
- 兼容性指導:可以遠程連接到PC虛擬機、Raspberry Pi系列、Jetson系列和其他主控板。
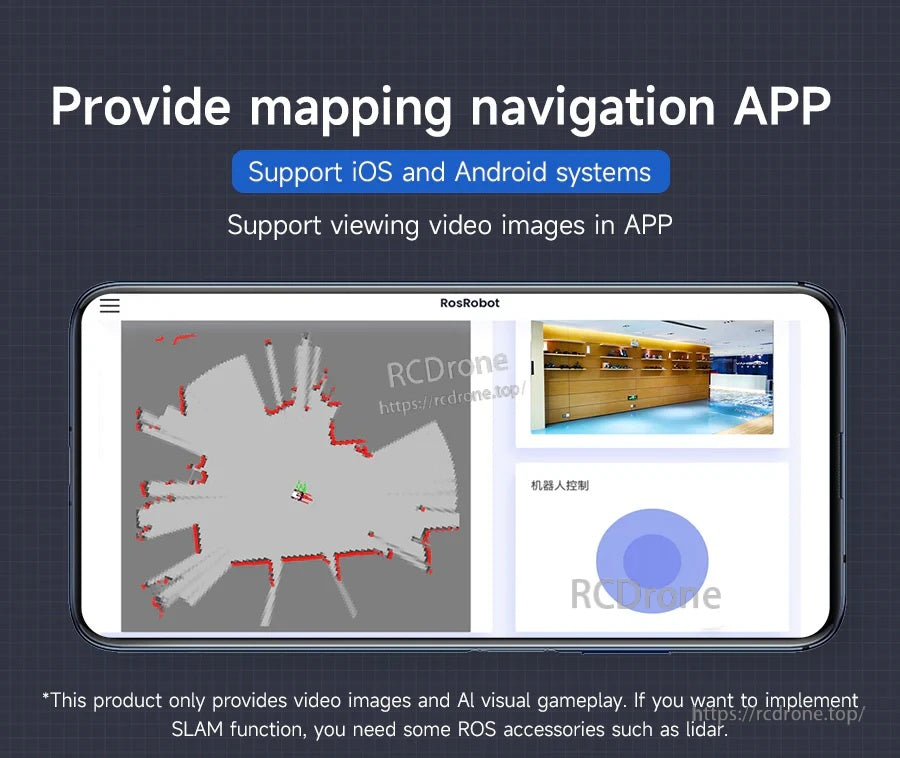
- 提供AI視覺程序案例(示例包括:使用HSV的OpenCV顏色識別、MediaPipe 3D物體識別、手勢識別(14種)、QR碼創建/識別、MediaPipe人臉檢測(68個面部標誌點)和MediaPipe姿勢檢測(33個關鍵點))。
- 可選配置支持:PTZ配置中支持2D電動PTZ;標準配置具有固定視角,無法調整角度。
規格
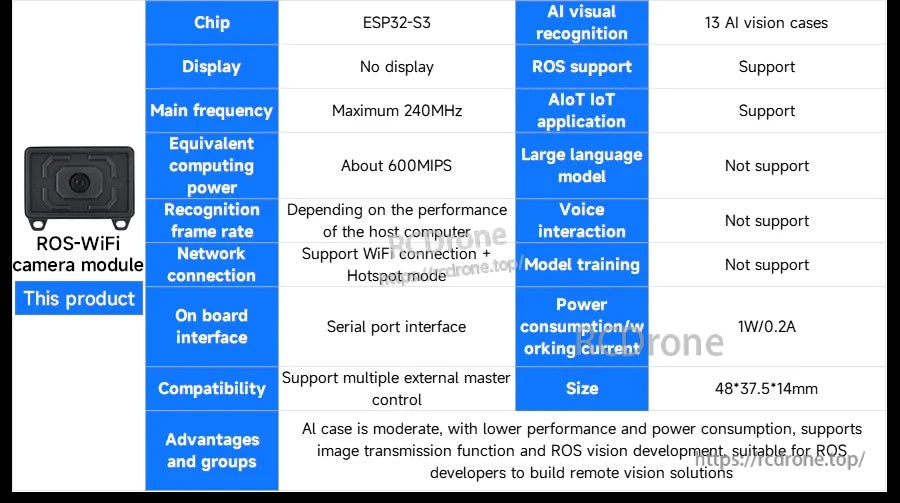
| 芯片 | ESP32-S3 |
| 攝像頭 | 2MP |
| WiFi | 2.4GHz頻段 |
| 網絡連接 | 支持WiFi連接 + 熱點模式 |
| 傳輸模式(如上所述) | 支持WiFi-UDP模式 |
| 顯示 | 無顯示 |
| 主頻 | 最高240MHz |
| 等效計算能力 | 約600MIPS |
| 識別幀率 | 取決於主機性能 |
| 板載接口 | 串口接口 |
| 兼容性 | 支持多個外部主控 |
| AI視覺識別案例 | 13個AI視覺案例 |
| ROS支持 | 支持 |
| AIoT物聯網應用 | 支持 |
| 大型語言模型 | 不支持 |
| 語音互動 | 不支持 |
| 模型訓練 | 不支持 |
| 功耗 / 工作電流 | 1W / 0.2A |
| 尺寸 | 48*37.5*14mm |
包含內容
標準配置 (ROS-WiFi 相機模組)
- ROS-WiFi 相機模組 x1
- 螺絲 x3
- 連接線 x2
- 串口模組 x1
雲台配置 (ROS-WiFi 相機模組 + 2DOF 雲台)
- ROS-WiFi 相機模組 x1
- 螺絲銅柱 + 固定翼安裝包 x1
- 連接線 x2
- 串口模組 x1
- 雲台配件包 (雲台已組裝) x1
如需接線、配置和 ROS2 集成支持,請聯繫[email protected] or訪問https://rcdrone.top/.
應用
- 通過 microROS 在同一局域網內為 ROS2 機器人進行無線圖像傳輸
- 在主機電腦上進行 ROS2 視覺開發,包括 PC/虛擬機環境
- 使用 OpenCV 和 MediaPipe 示例案例進行 AI 視覺演示
- 安裝在智能汽車、無人機、機器人和其他平台上
詳情

一個緊湊的 ROS-WiFi 攝像頭模組,適用於 ROS2 機器人,結合了 ESP32-S3 和一個 2MP 攝像頭,並置於保護性的 3D 打印外殼中。

主要功能包括 2.4GHz WiFi 視頻流、microROS/ROS2 圖像主題、WiFi-UDP 支持和串口 WiFi 設置。

快速規格概述強調 ESP32-S3 處理、WiFi 連接加熱點模式,以及用於配置的串行接口。
選擇 ROS-WiFi 配置以進行無線 ROS 圖像傳輸和 Yahboom 提供的 AI 視覺示例程序。

該模組連接到運行ROS2的主機,以通過WiFi發布相機影像數據,用於計算機視覺任務。
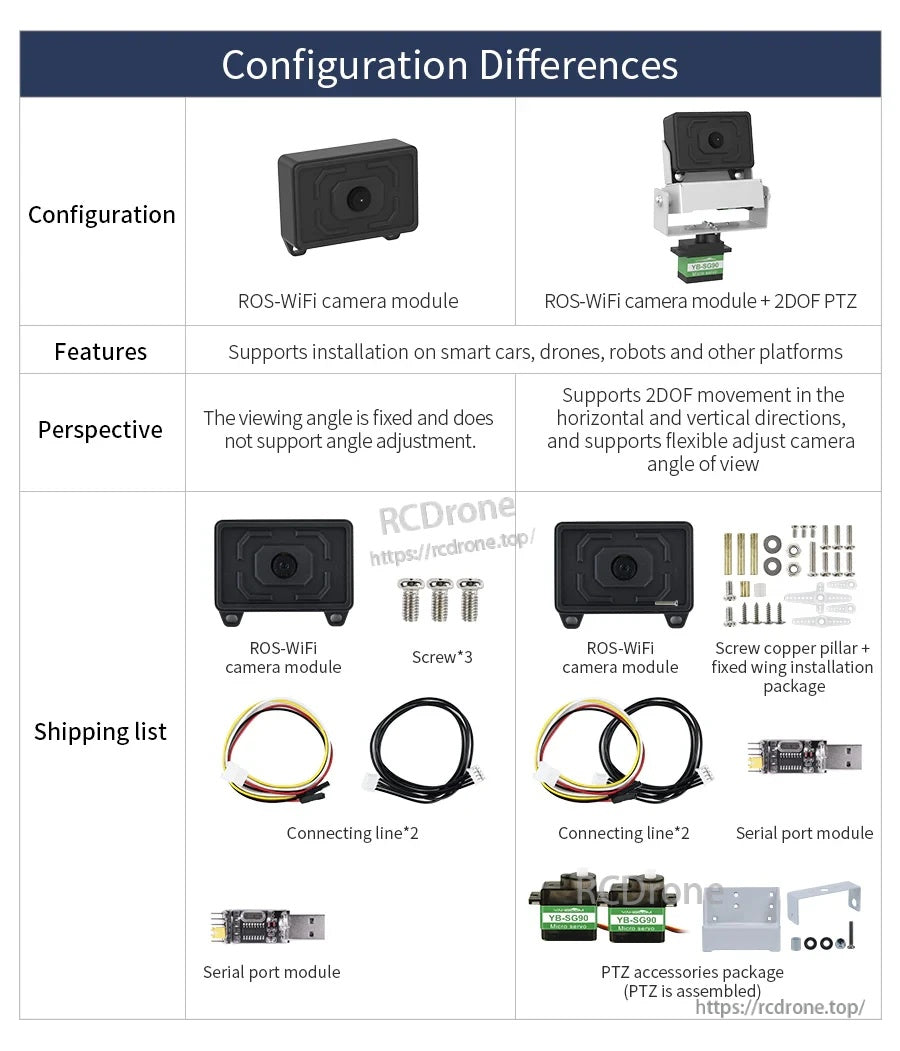
提供兩種構建選項:固定視角或可選的2D電動PTZ設置,用於可調整的平移/傾斜。

兼容常見控制器,如PC虛擬機、Raspberry Pi和Jetson,用於ROS2開發和調試。
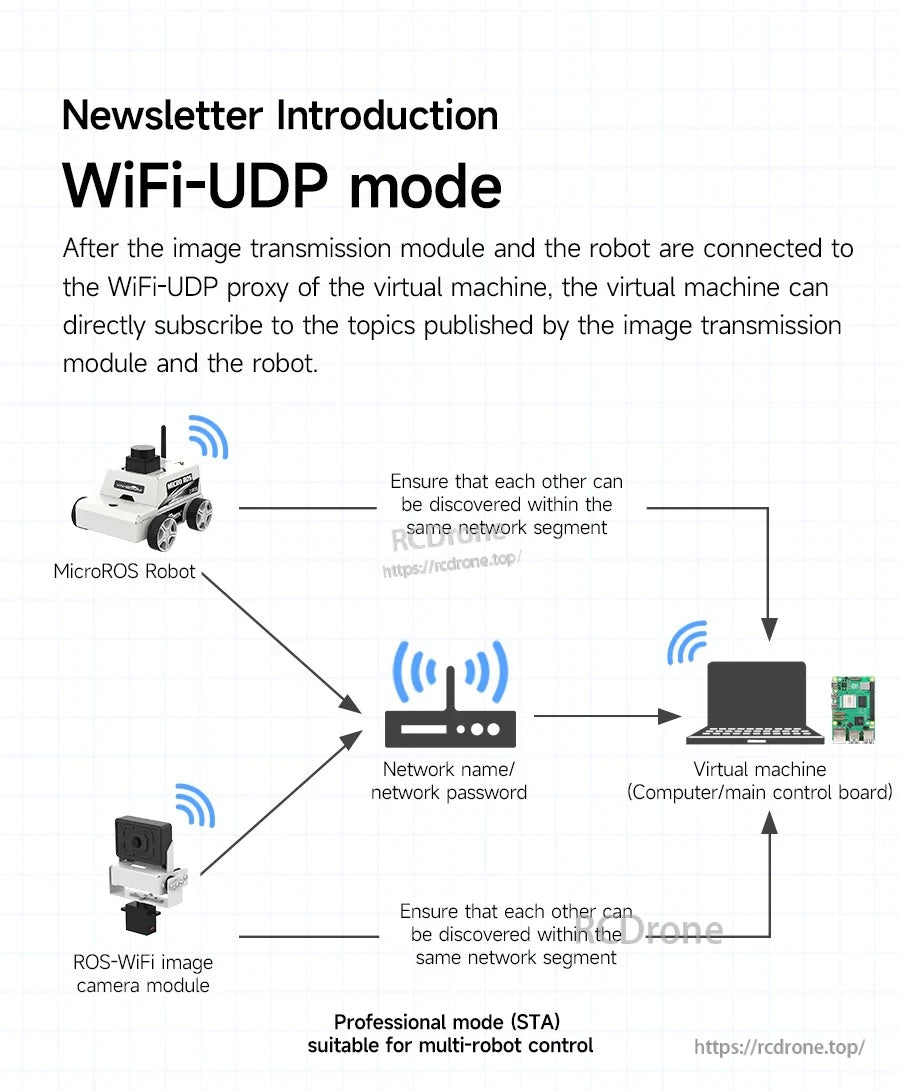
WiFi-UDP模式使虛擬機能夠訂閱由機器人和相機模組在同一LAN上發布的主題。
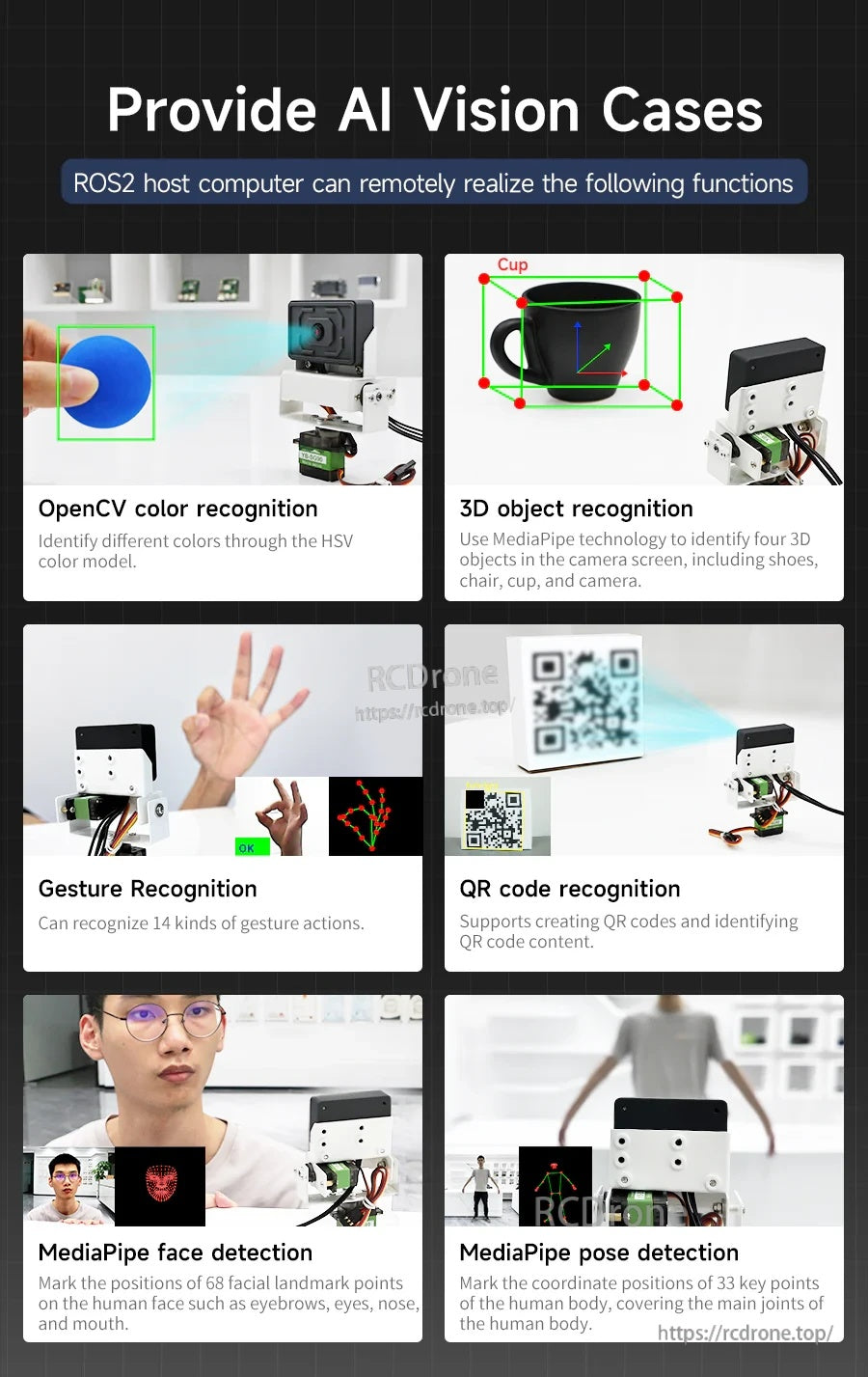
內建範例專案涵蓋常見的視覺任務,如顏色識別、手勢檢測、QR解碼和姿勢追蹤。

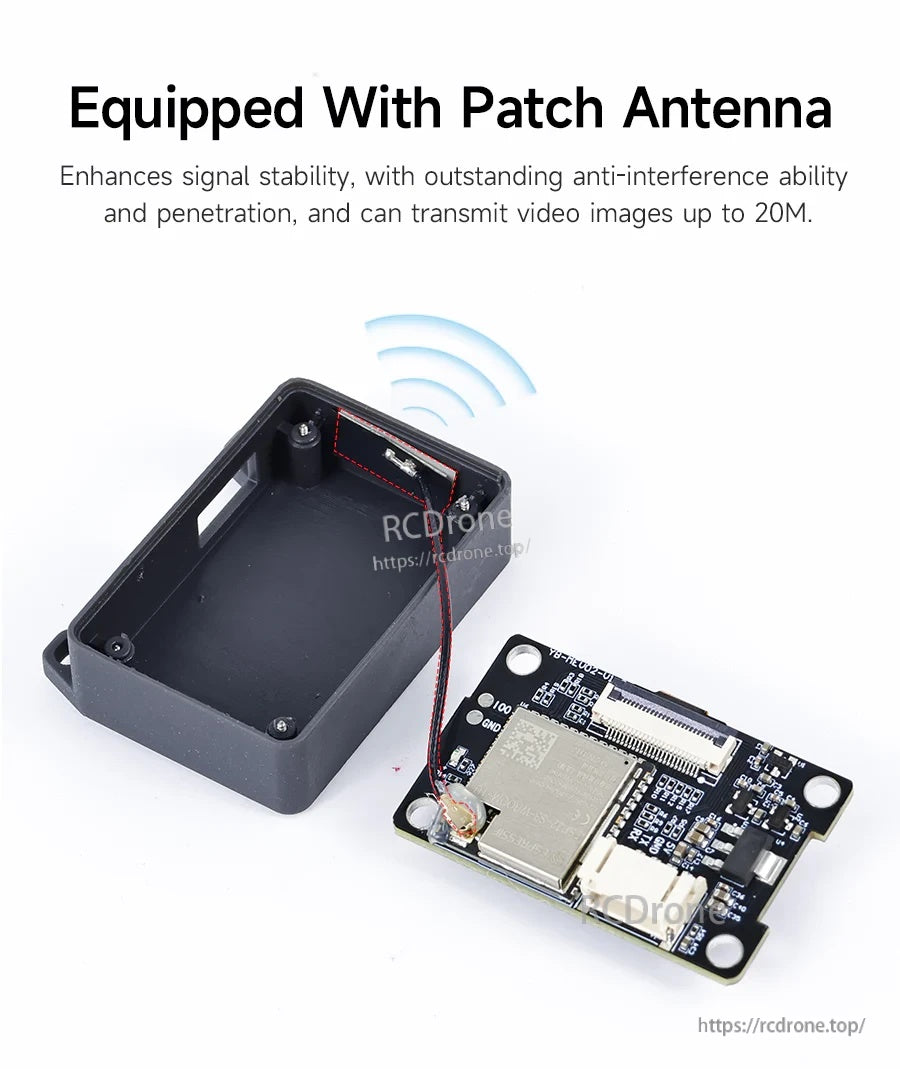
貼片天線設計有助於維持穩定的WiFi連接,以便在LAN內(聲稱可達20米)更順暢地傳輸影像。
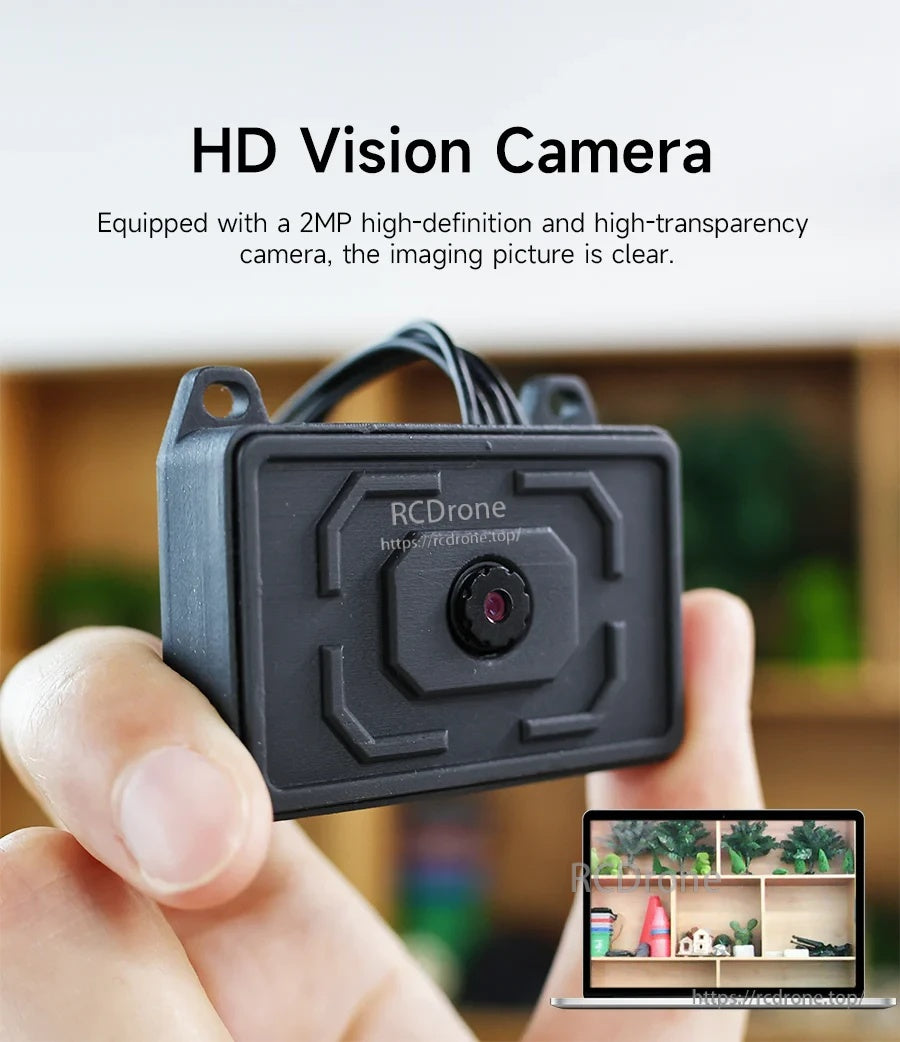
2MP HD 相機提供更清晰的圖像,用於 ROS2 主機電腦上的下游 AI 識別。
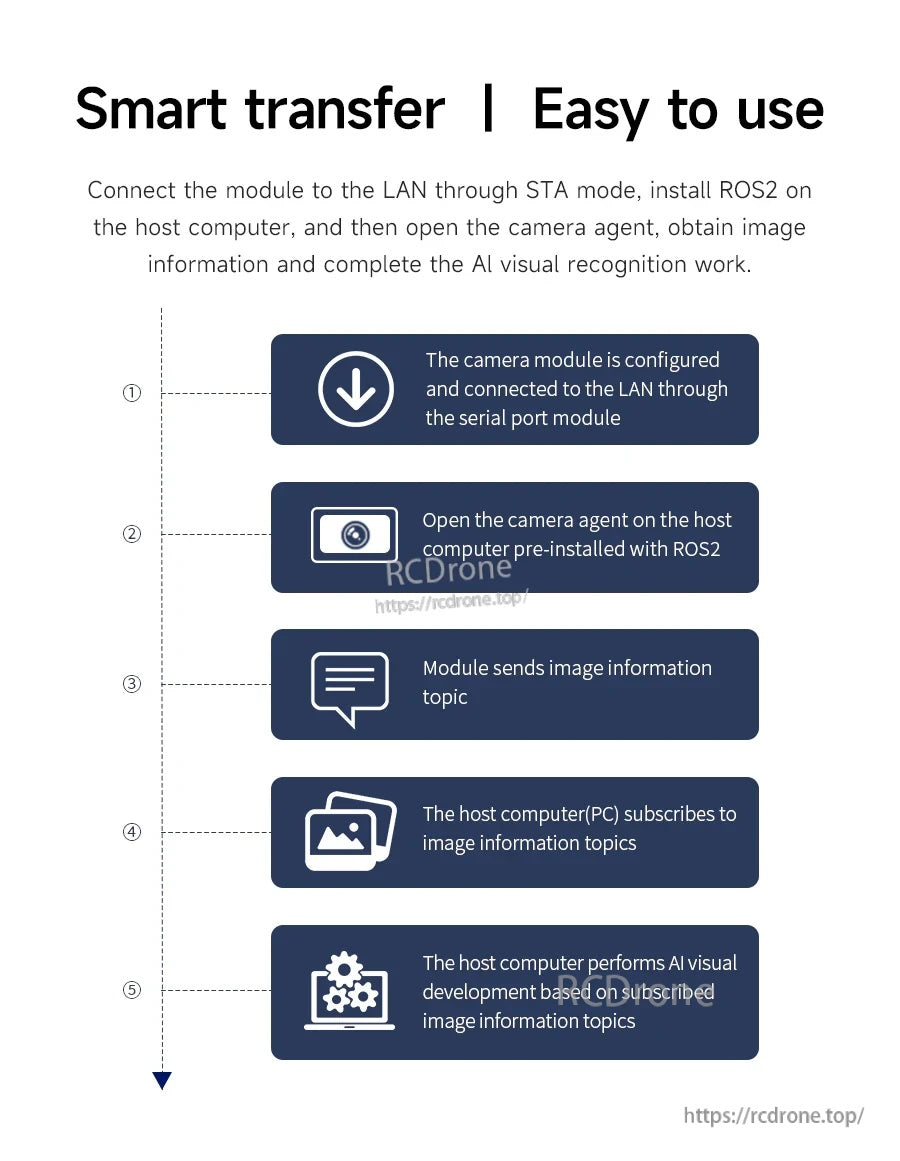
設置遵循簡單流程:配置 WiFi,啟動 ROS2 相機代理,發布圖像主題,然後在主機上訂閱。
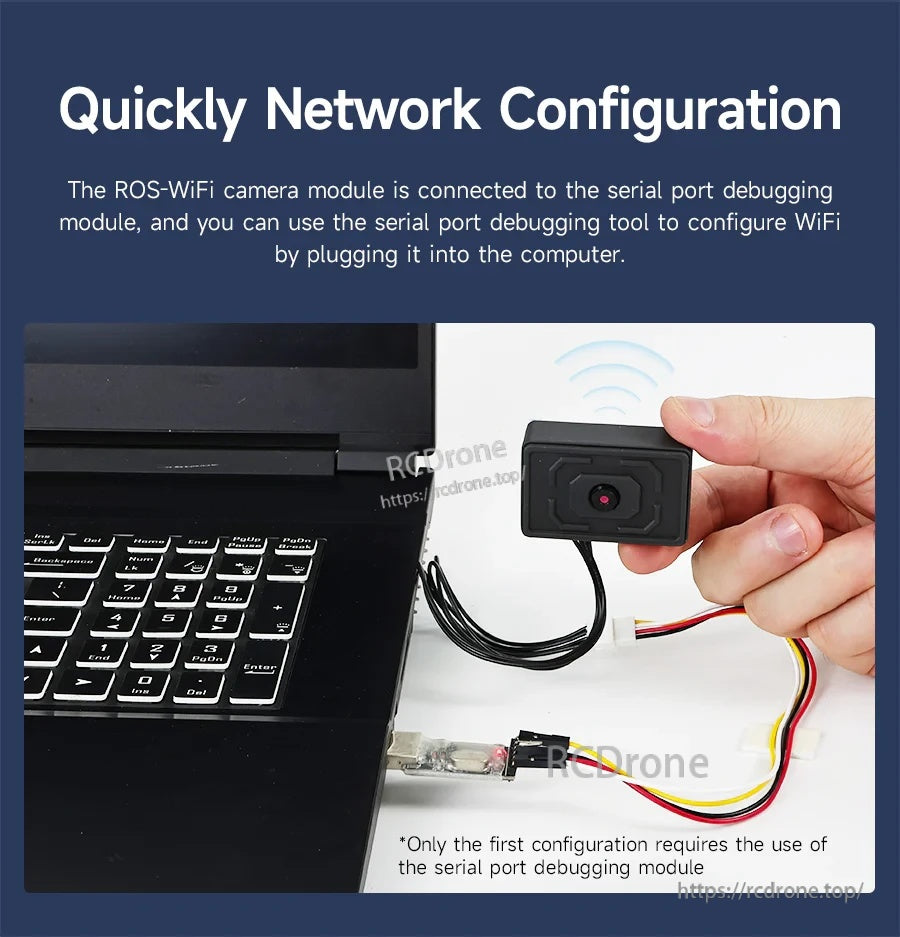
初始 WiFi 憑證可以通過連接到計算機的串口模塊設置,然後切換到無線操作。

Yahboom ROS-WiFi ESP32-S3 相機支持無線視頻傳輸,方便在計算機上進行實時觀看。

Yahboom ROS WiFi ESP32-S3 相機模塊可以安裝在機器人車或機械臂上,用於車載視覺任務。
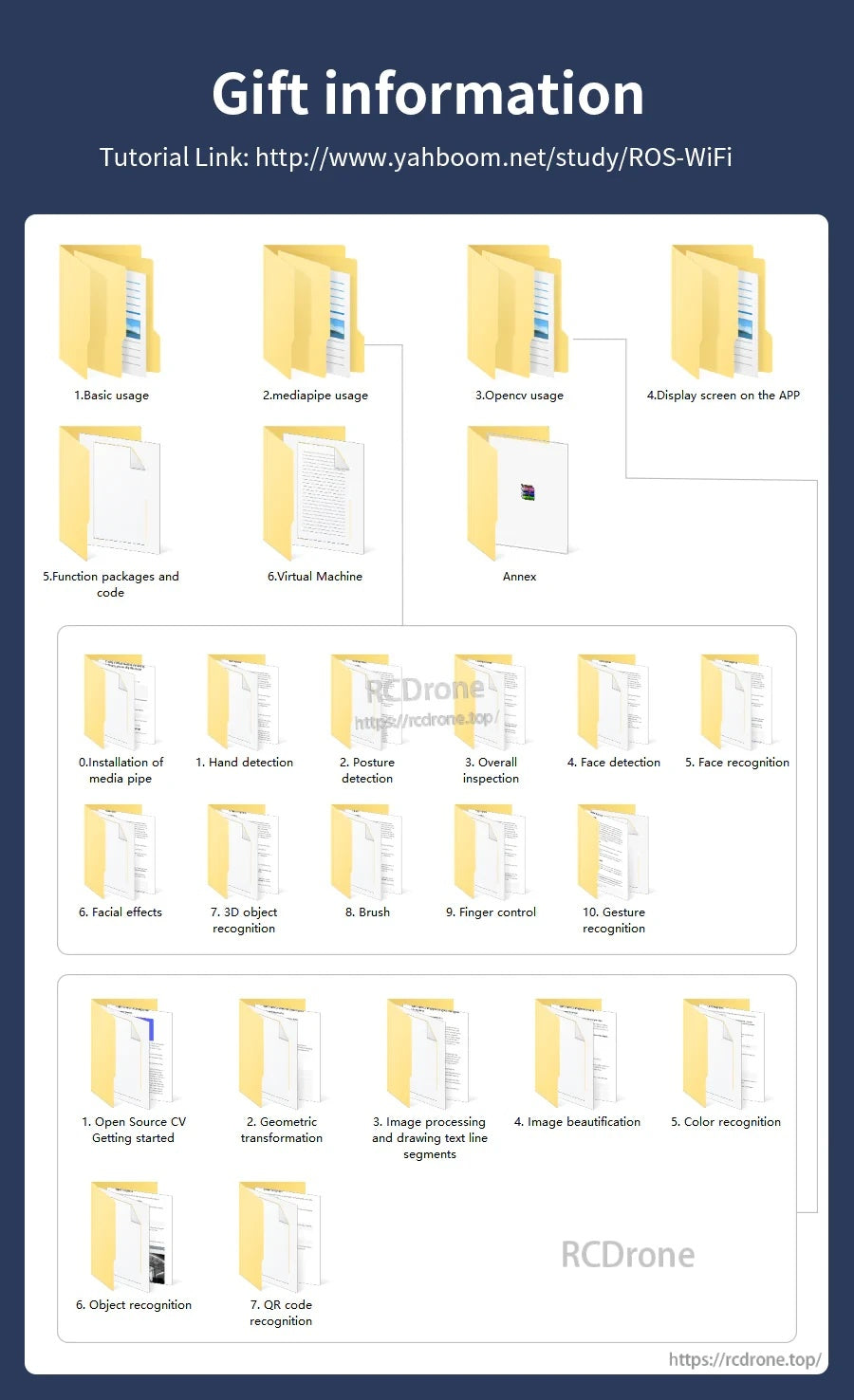
Yahboom ROS-WiFi ESP32-S3 相機套件包括教程下載,內含示例項目,如 OpenCV、MediaPipe、人臉檢測、手勢控制和 QR 碼識別。

Yahboom ESP32-S3 WiFi 相機模組具有緊湊的鏡頭外殼,可以安裝在帶有伺服器的小支架上,用於平移/傾斜設置。
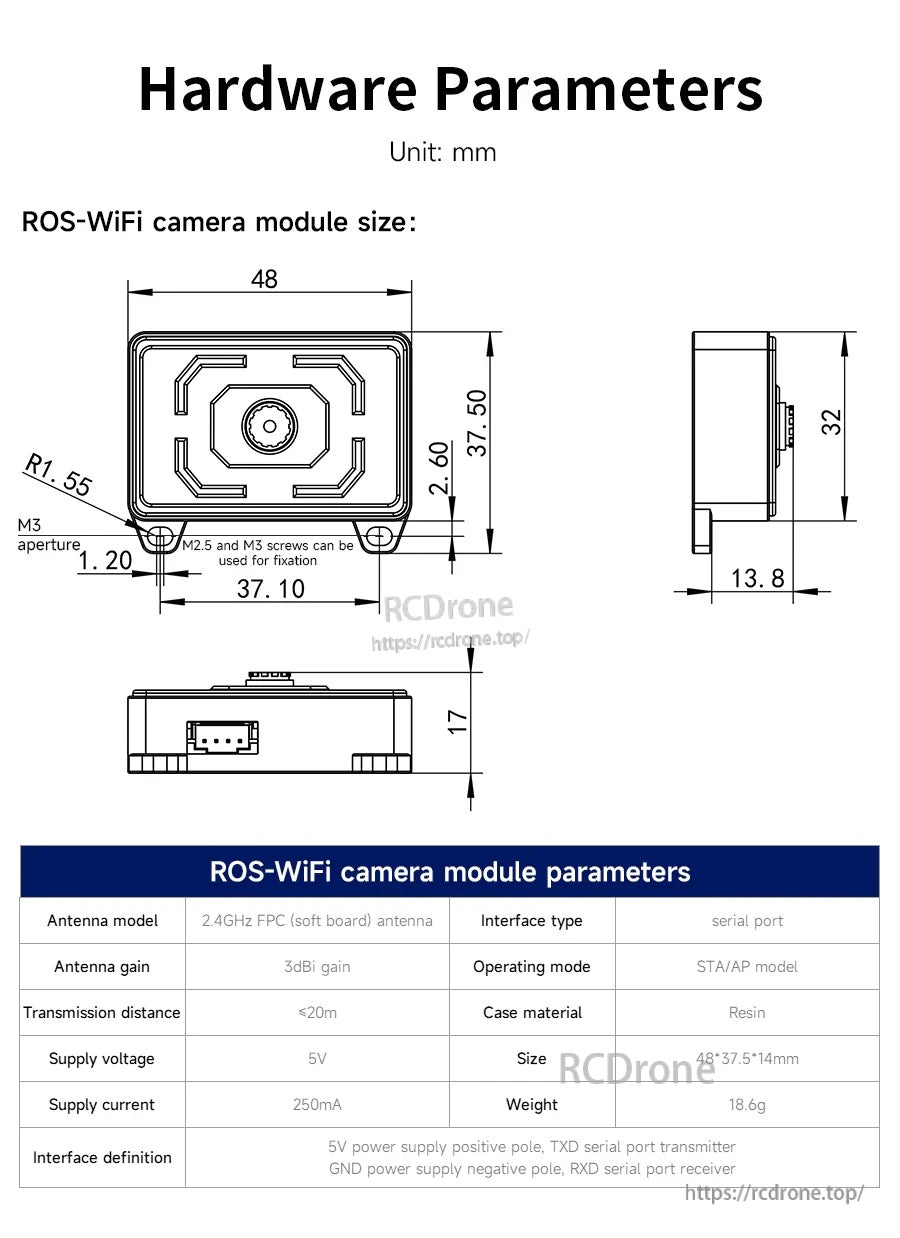
ROS-WiFi 相機模組列出 48×37.5×14 mm 的機身尺寸,具有 5V 串口接口(TXD, GND)和 2.4GHz PCB 天線,增益為 3dBi。
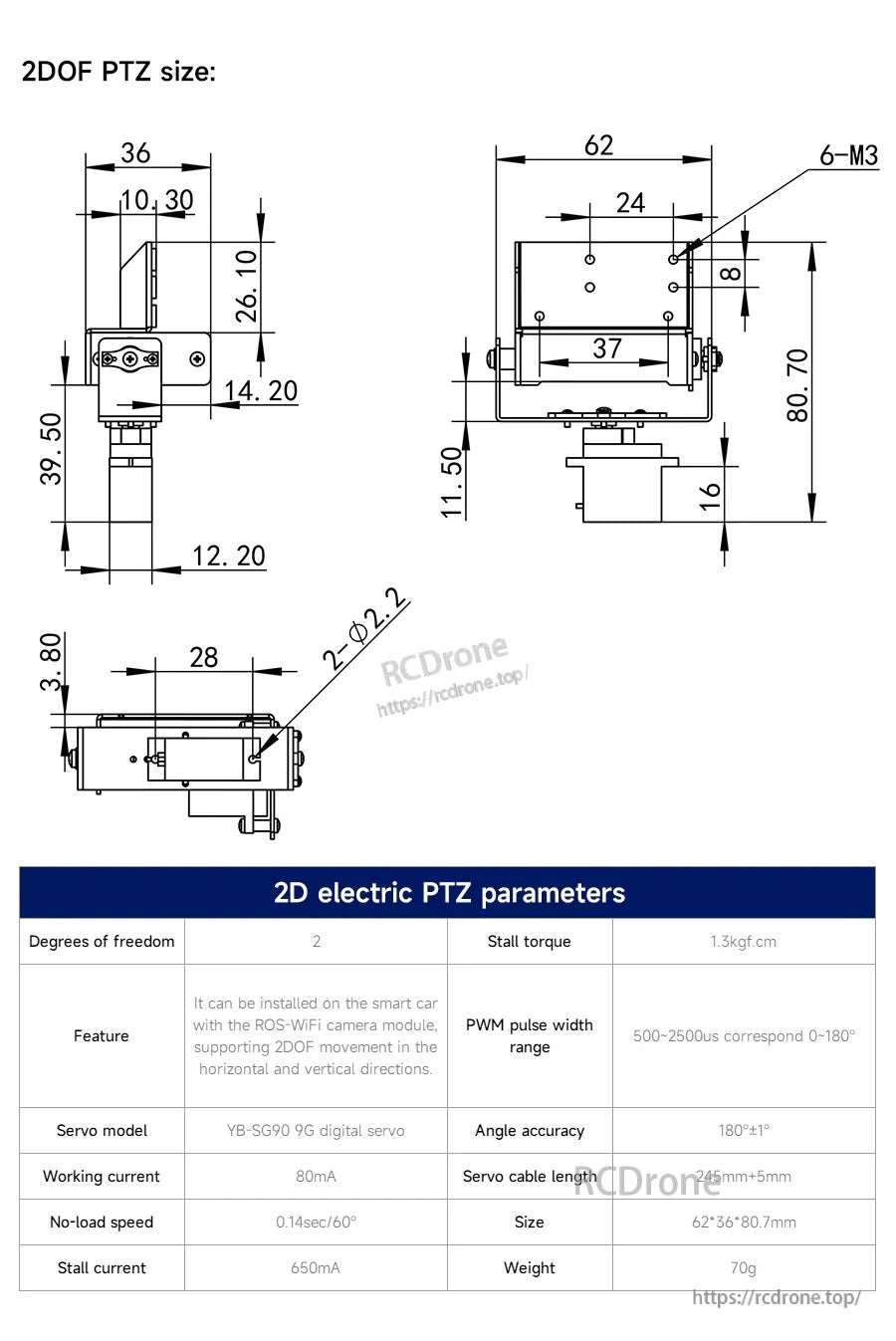
2DOF 電動 PTZ 支架包括尺寸圖和關鍵伺服器規格,如 62×56×80 mm 的尺寸和 0–180° PWM 控制範圍,以便於集成。
Related Collections






