








Yahboom STM32 智能車 2合1 多功能開發板套件,STM32F103ZET6,72MHz,512k
Yahboom STM32 智能車 2合1 多功能開發板套件,STM32F103ZET6,72MHz,512k
Yahboom
無法載入取貨服務供應情況
概述
這款STM32 智能車與多功能開發板 是一個圍繞STM32 MCU設計的開發板& 智能車二合一平台。它集成了多個板載外設(蜂鳴器、紅外傳感器、光敏傳感器、RGB/探照燈照明、獨立按鈕等),並提供了廣泛的擴展接口和安裝孔,用於外部傳感器和控制模塊。通過C語言編程,可以實現避障、紅外跟隨和遙控等功能;結合輪胎、馬達和超聲波模塊,可以組裝成一個四驅智能車。
主要特點
- 開發板 & 智能車 2合1
- 開源教程和代碼;支持多種外部傳感器
- 板載MCU:STM32F103ZET6 (ARM Cortex-M3),最高72 MHz,512KB Flash,64KB RAM
- 外圍資源包括UART、I2C、SPI、定時器、ADC和144個GPIO引腳
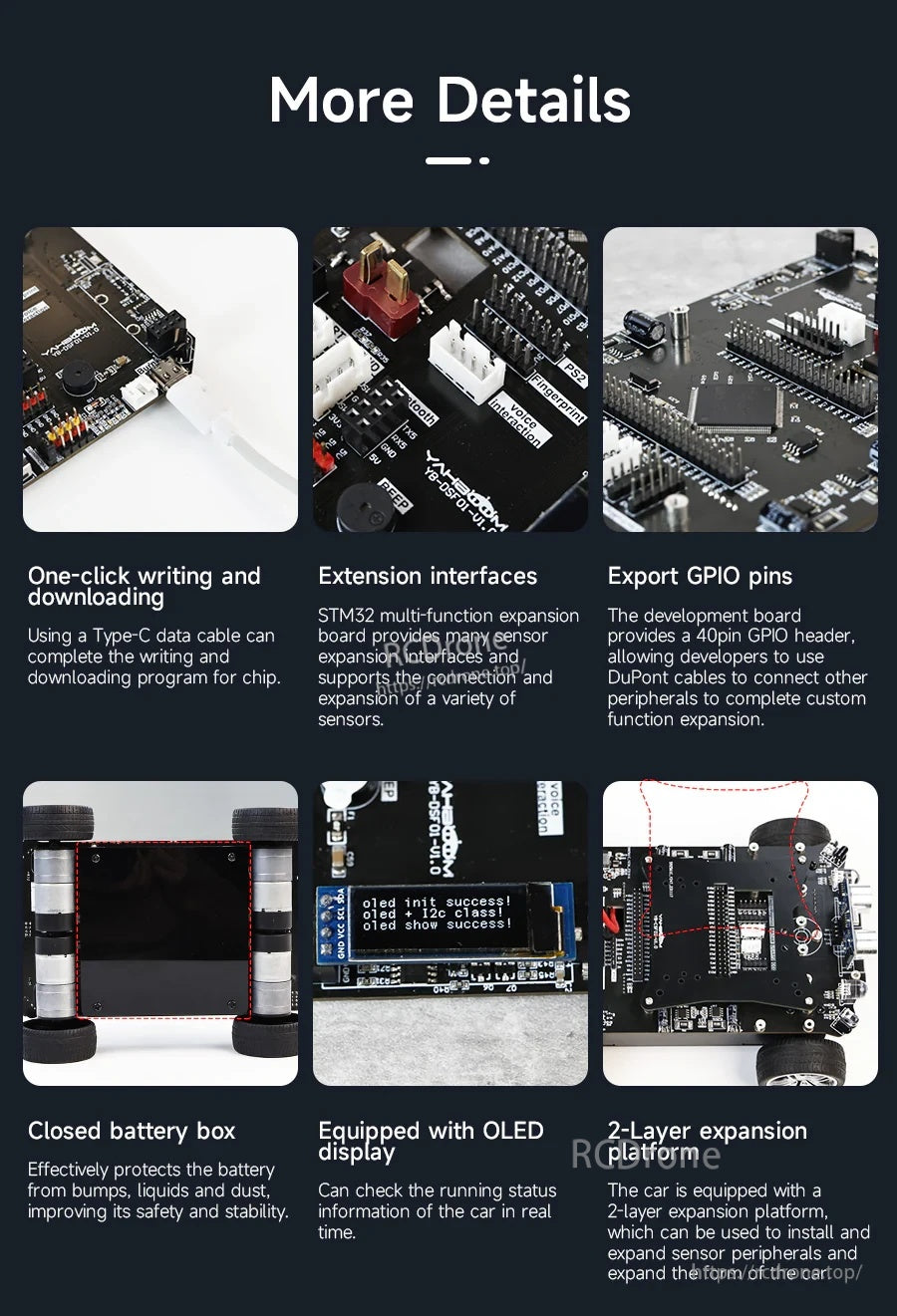
- Type-C數據線編程/下載(一鍵寫入和下載)
- 40針GPIO擴展頭(支持杜邦線連接)
- 2層擴展平台,用於安裝額外的傳感器外圍設備
- 封閉式電池盒設計(保護電池免受碰撞、液體和灰塵的影響)
- 配備OLED顯示屏,用於實時運行狀態信息
- 安全保護:短路保護,過流保護
功能展示
- OLED顯示
- 蜂鳴器聲音
- 超聲波數據檢測
- 紅外控制數據檢測
- 按鈕控制燈光
- 電壓檢測
- 彩色燈光顯示
- 光敏數據檢測
智能車功能顯示(如列表所示)
- 超聲波 & PTZ多角度避障(可選:需要伺服PTZ),d = 8cm
- 紅外避障
- 紅外跟蹤(可選:需要4通道跟蹤模塊)
- 2.4G 無線手柄控制(可選:需要 2 個)。4G 手柄)
- 紅外線遙控
- 超聲波測距,d = 30cm
- 超聲波跟隨
- 機器碼追蹤(可選:需要 K230 視覺模組)
- 語音互動控制(可選:需要 K230 視覺模組 + AI 語音模組)
- 手勢控制(語音播報)(可選:需要 K230 視覺模組 + AI 語音模組)
- 路標識別(語音播報)(可選:需要 K230 視覺模組 + AI 語音模組)
支持傳感器配件(如列表所示)
- RGB 燈
- 2DOF 電動雲台追蹤
- 驅動伺服電機
- 陀螺儀線性校正
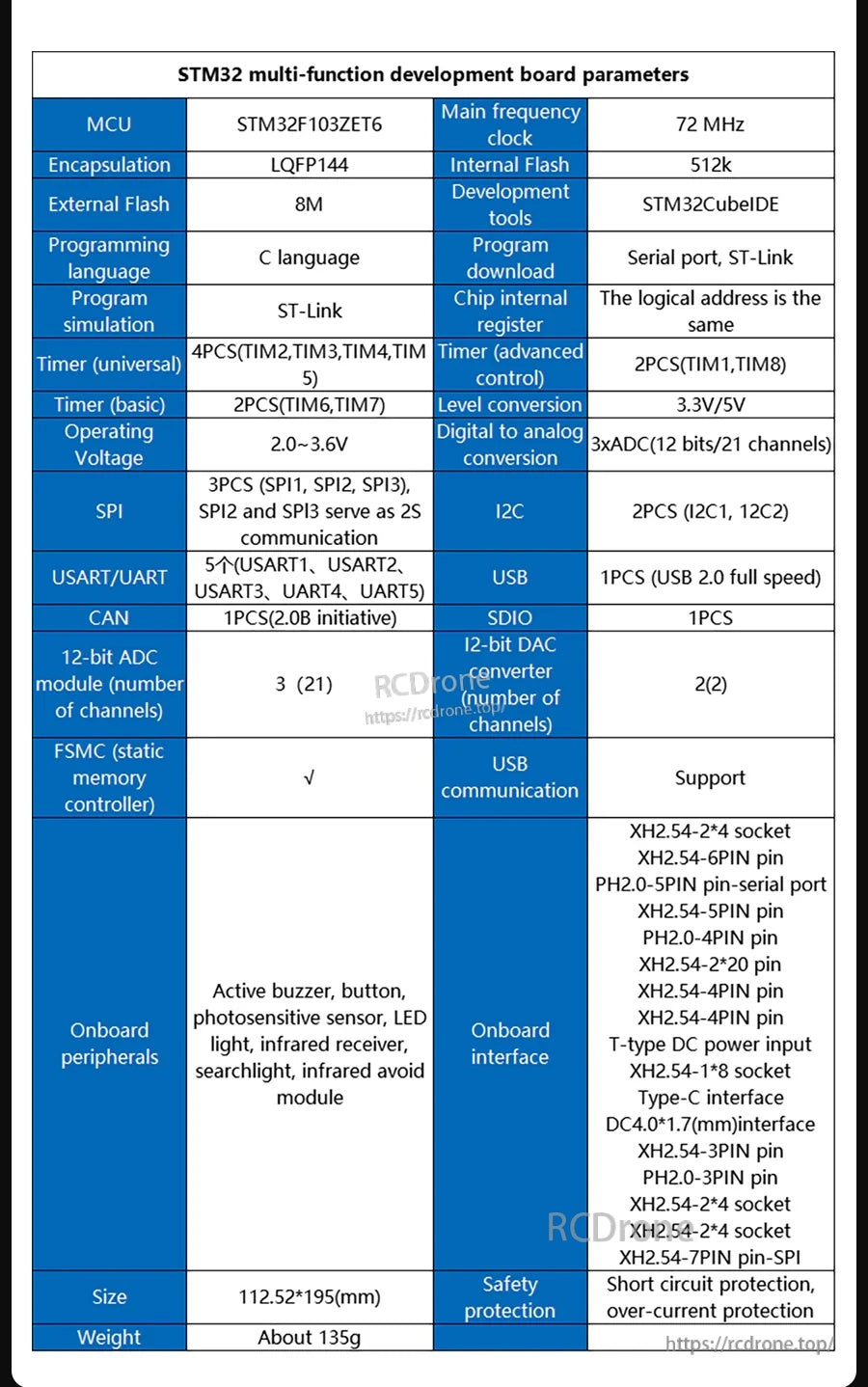
規格
| MCU | STM32F103ZET6 |
| 內核 | Cortex M3 |
| 封裝 | LQFP144 |
| 引腳數量 | 144 |
| 主頻時鐘 | 72 MHz |
| 內部閃存 | 512k |
| RAM | 64KB |
| 外部閃存 | 8M |
| 編程語言 | C 語言 |
| 開發工具 | STM32CubeIDE |
| 程序下載 | 串口, ST-Link |
| 程序模擬 | ST-Link |
| 工作電壓 | 2.0~3.6V |
| 電平轉換 | 3.3V/5V |
| 定時器 | 8 |
| 定時器(通用) | 4個(TIM2, TIM3, TIM4, TIM5) |
| 定時器(基礎) | 2個(TIM6, TIM7) |
| 定時器(高級控制) | 2個(TIM1, TIM8) |
| SPI | 3個(SPI1, SPI2, SPI3),SPI2和SPI3用作2S通信 |
| I2C | 2個(I2C1, I2C2) |
| USART/UART | 5個(USART1, USART2, USART3, UART4, UART5) |
| USB | 1個(USB 2.0全速) |
| CAN | 1個(2.0B initiative) |
| SDIO | 1PCS |
| 12位ADC模組(通道數) | 3 (21) |
| 數位轉類比轉換 | 3xADC (12 bits/21 channels) |
| 12位DAC轉換器(通道數) | 2 (2) |
| FSMC(靜態記憶體控制器) | √ |
| USB通訊 | 支持 |
| 板載外圍設備 | 有源蜂鳴器、按鈕、光敏傳感器、LED燈、紅外接收器、探照燈、紅外避障模組 |
| 尺寸 | 112.52*195(mm) |
| 重量 | 約 135g |
| 安全保護 | 短路保護,過流保護 |
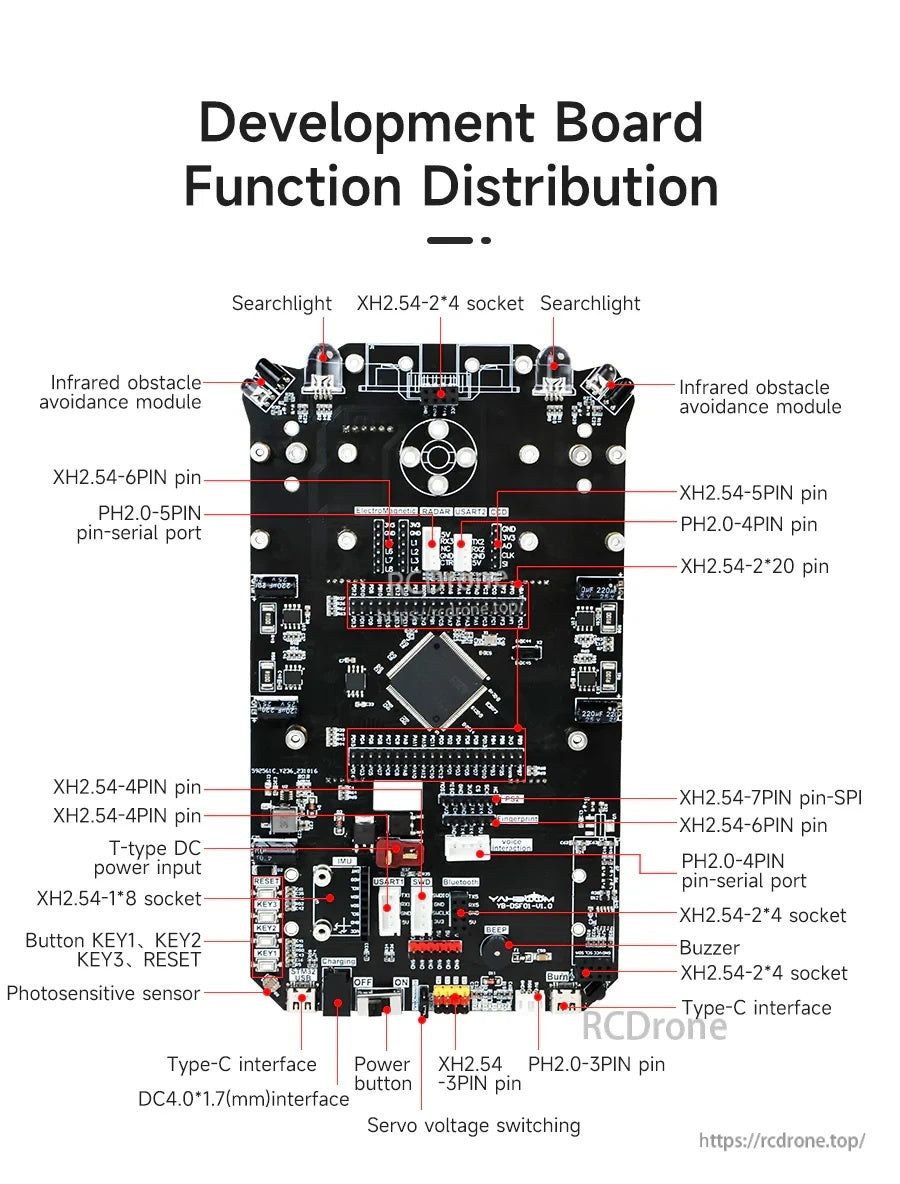
板載介面 / 功能分佈(如標示)
- 探照燈(左/右)
- 紅外線避障模組(左/右)
- XH2.54-2*4 插座
- XH2.54-6PIN 針
- PH2.0-5PIN 針-串口
- XH2.54-5PIN 針
- PH2.0-4PIN 針
- XH2.54-2*20 針
- XH2.54-4PIN 針
- XH2.54-7PIN 針-SPI
- XH2.54-1*8 插座
- XH2.54-3PIN 針
- PH2.0-3PIN 針
- Type-C 介面
- T型 DC 電源輸入
- DC4.0*1.7(mm)介面
- 電源按鈕
- 按鈕 KEY1, KEY2, KEY3, RESET
- 光敏傳感器
- 蜂鳴器
- 伺服電壓切換
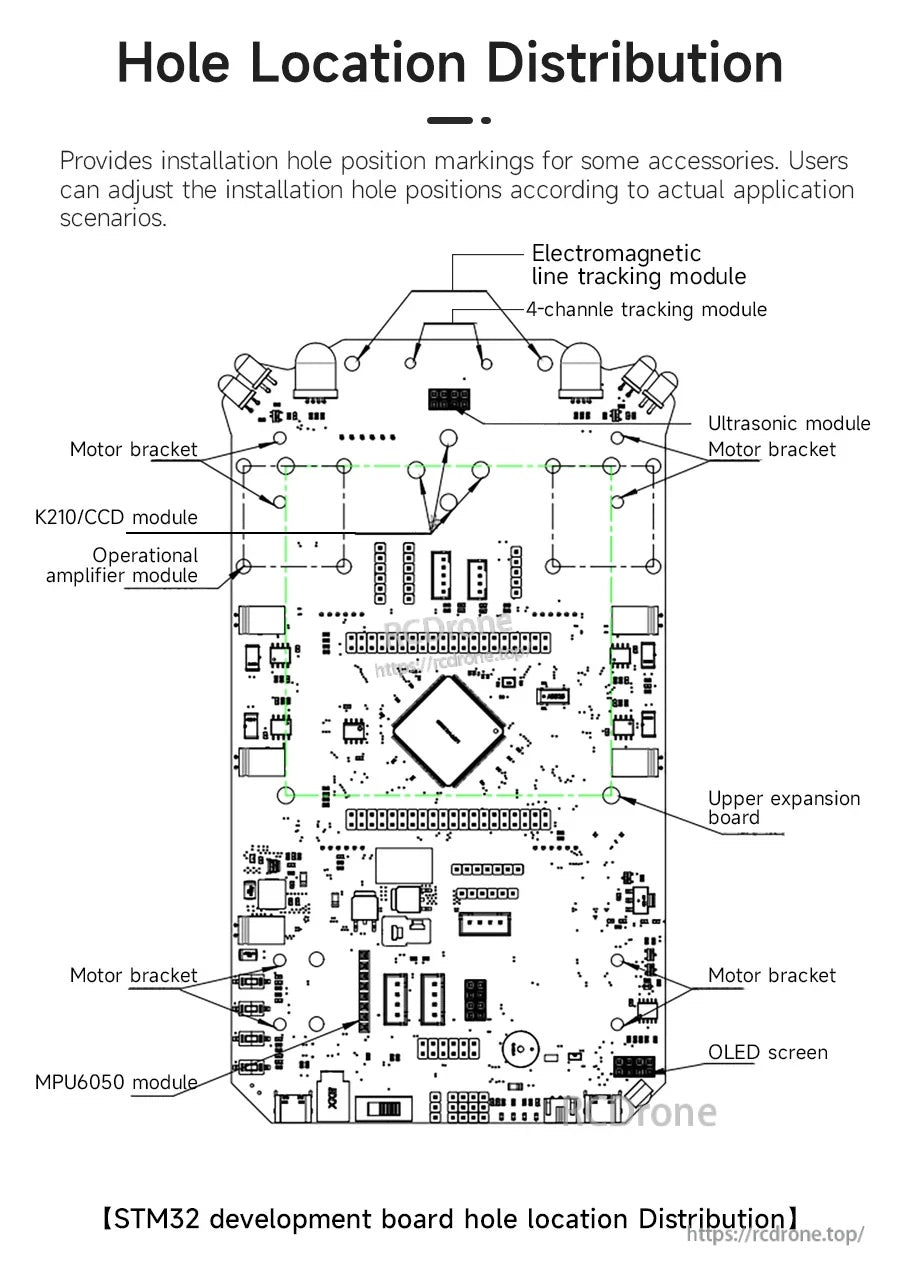
安裝孔位置分佈(如標示)
提供一些配件的安裝孔位置標記。用戶可以根據實際應用場景調整安裝孔位置。
- 電磁線跟踪模塊
- 4通道跟踪模塊
- 超聲波模塊
- 馬達支架
- K210/CCD模塊
- 運算放大器模塊
- MPU6050模塊
- 上擴展板
- OLED屏幕
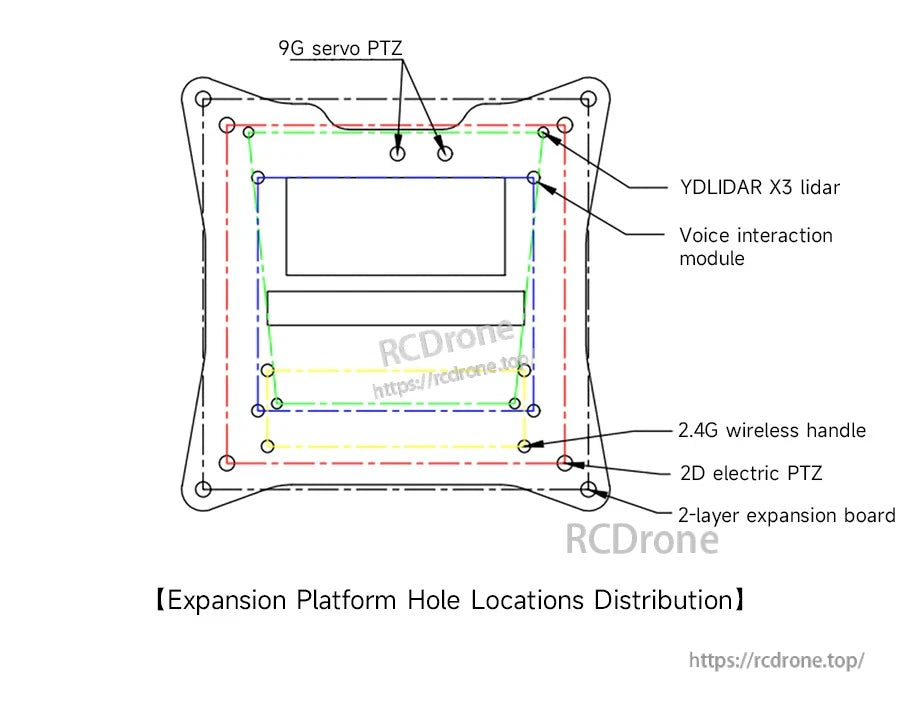
擴展平台孔位置(如標示)
- 9G伺服雲台
- YDLIDAR X3激光雷達
- 語音交互模塊
- 2.4G無線手柄
- 2D電動雲台
- 2層擴展板
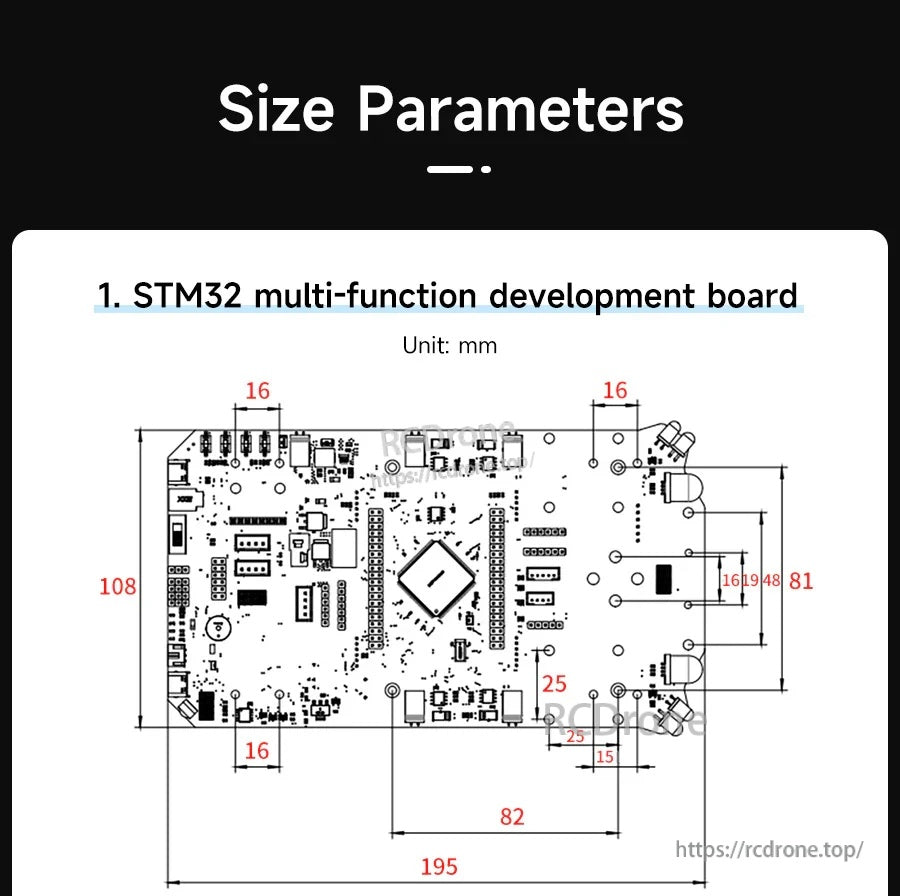
尺寸參數
STM32多功能開發板
- 單位:mm
- 尺寸:112.52*195(mm)
- 附加圖紙標記(單位:mm):195, 108, 82, 81, 48, 19, 25, 16, 15
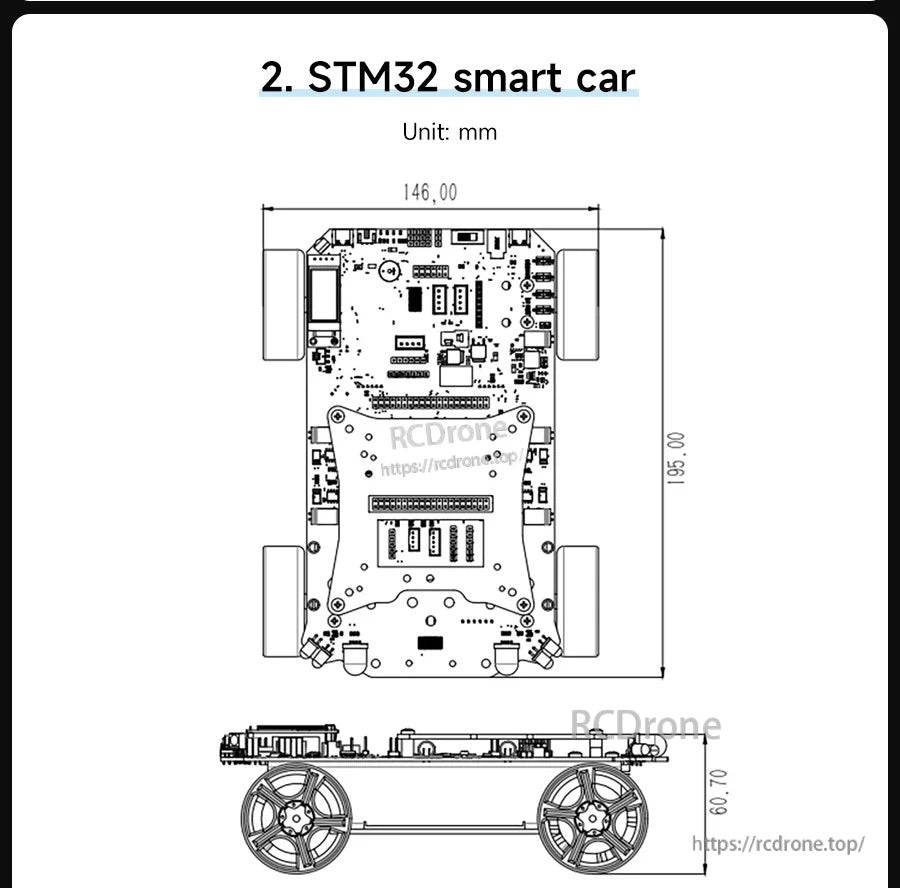
STM32智能車
- 單位:mm
- 整體(俯視圖):146.00 x 195.00
- 高度(側視圖):60.70
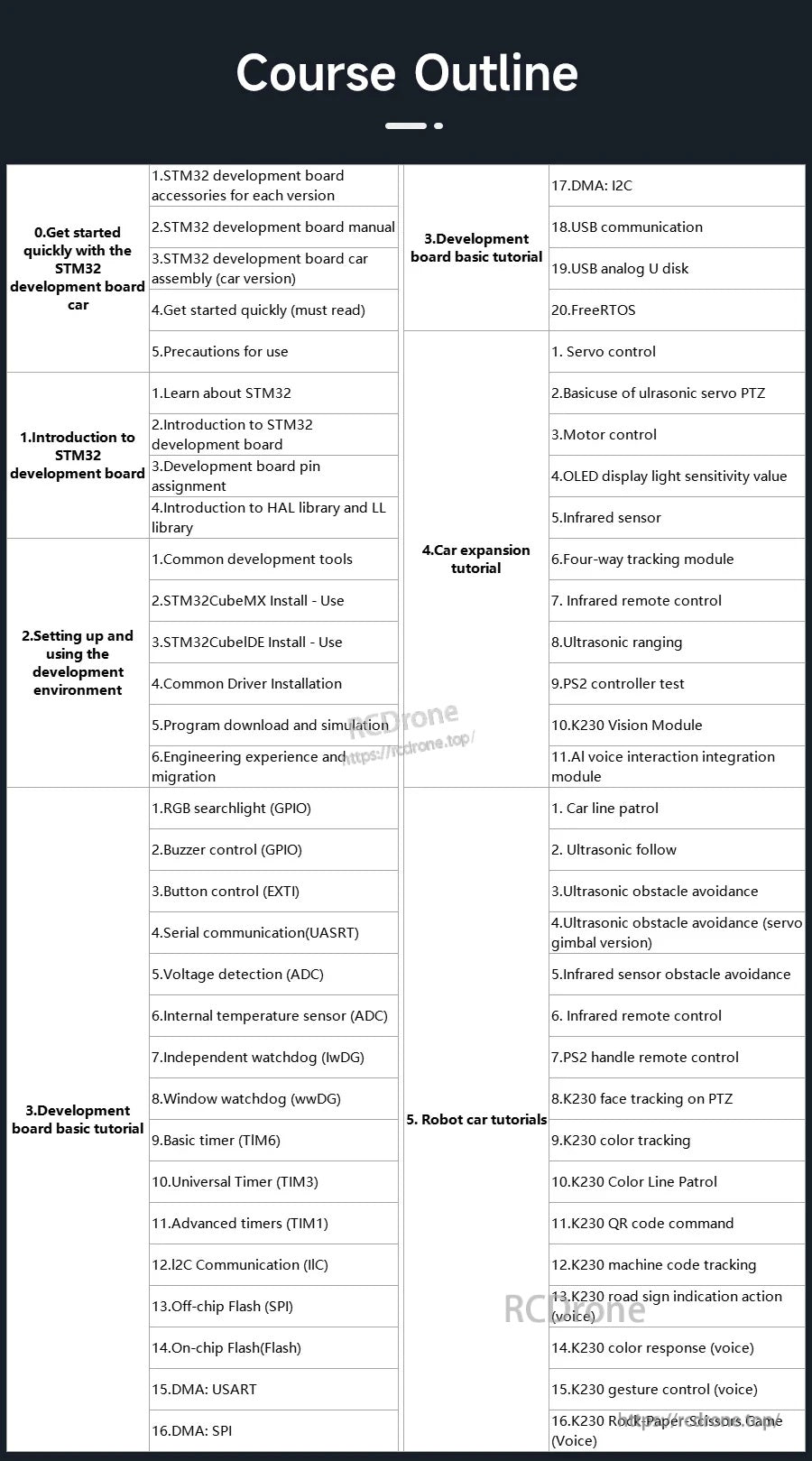
課程大綱(如列表所示)
0. 快速入門STM32開發板車
- 每個版本的STM32開發板配件
- STM32開發板手冊
- STM32開發板車組裝(車版本)
- 快速入門(必讀)
- 使用注意事項
1. STM32開發板介紹
- 了解STM32
- STM32開發板介紹
- 開發板引腳分配
- HAL庫和LL庫介紹
2. 設置和使用開發環境
- 常用開發工具
- STM32CubeMX 安裝 - 使用
- STM32CubeIDE 安裝 - 使用
- 常用驅動安裝
- 程序下載和模擬
- 工程經驗和遷移
3. 開發板基礎教程
- RGB 探照燈 (GPIO)
- 蜂鳴器控制 (GPIO)
- 按鈕控制 (EXTI)
- 串行通信 (USART)
- 電壓檢測 (ADC)
- 內部溫度傳感器 (ADC)
- 獨立看門狗 (IwDG)
- 窗口看門狗 (wwDG)
- 基本定時器 (TIM6)
- 通用定時器 (TIM3)
- 高級定時器 (TIM1)
- I2C 通信 (IIC)
- 片外 Flash (SPI)
- 片上 Flash (Flash)
- DMA: USART
- DMA: SPI
- DMA: I2C
- USB 通信
- USB 模擬 U 盤
- FreeRTOS
4. 車輛擴展教程
- 伺服控制
- 超聲波伺服雲台的基本使用
- 電機控制
- OLED顯示光敏值
- 紅外傳感器
- 四路循跡模塊
- 紅外遙控
- 超聲波測距
- PS2控制器測試
- K230視覺模塊
- AI語音交互集成模塊
5. 機器人車教程
- 車輛巡線
- 超聲波跟隨
- 超聲波避障
- 超聲波避障(伺服雲台版)
- 紅外線感測器避障
- 紅外線遙控
- PS2手柄遙控
- K230雲台人臉追蹤
- K230顏色追蹤
- K230顏色巡線
- K230 QR碼指令
- K230機器碼追蹤
- K230路標指示動作(語音)
- K230顏色反應(語音)
- K230手勢控制(語音)
- K230剪刀石頭布遊戲(語音)
應用
- STM32嵌入式開發學習與實驗
- 機器人車程式設計實踐(C語言)
- 通過XH2.54/PH2.0進行感測器擴展和原型製作
0/UART/SPI/I2C 介面
教程 / 手冊
如有售前兼容性問題或售後幫助,請聯繫https://rcdrone.top/或發送電子郵件至 [email protected].
詳情

構建和編程一個 2 合 1 平台,可作為獨立的 STM32 開發板或 4WD 智能車底座使用。
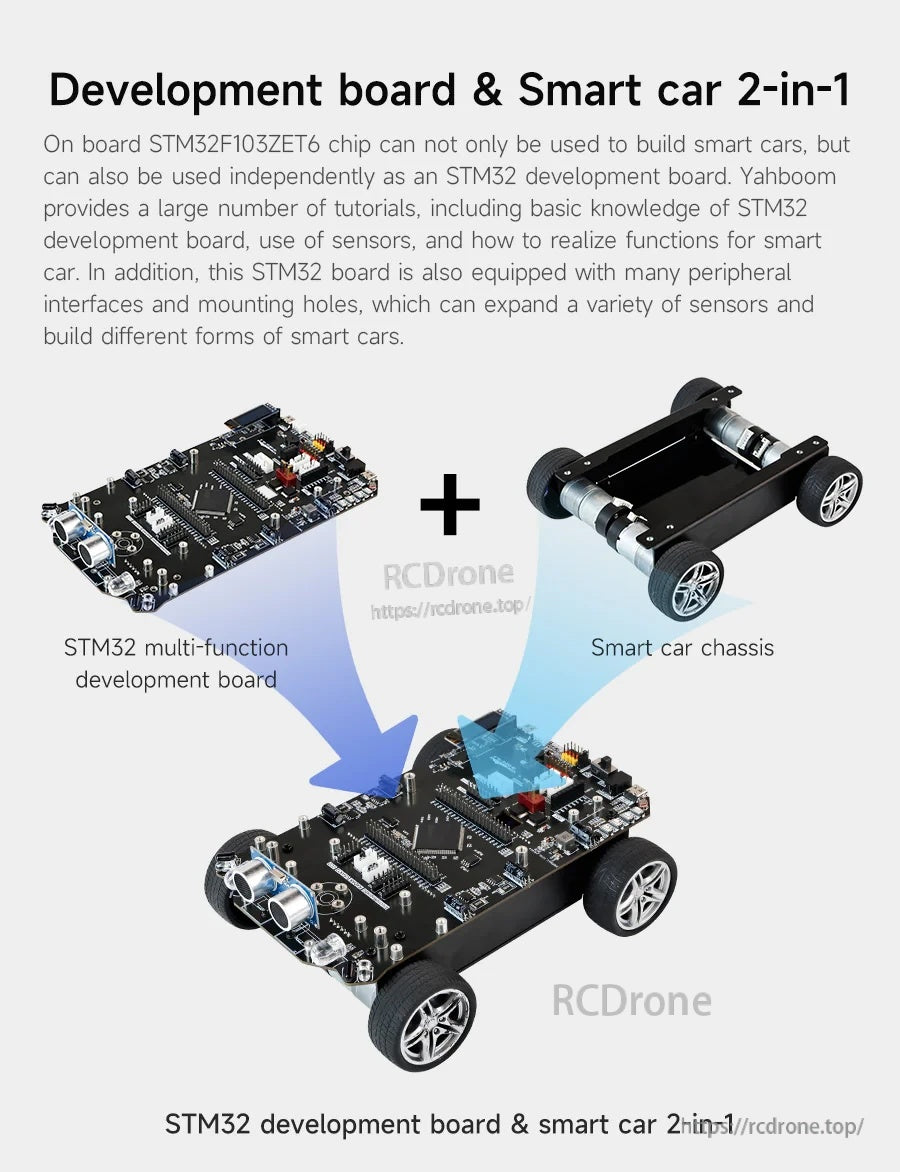
獨立使用開發板進行 MCU 實驗,然後將其安裝到底盤上開始智能車項目。
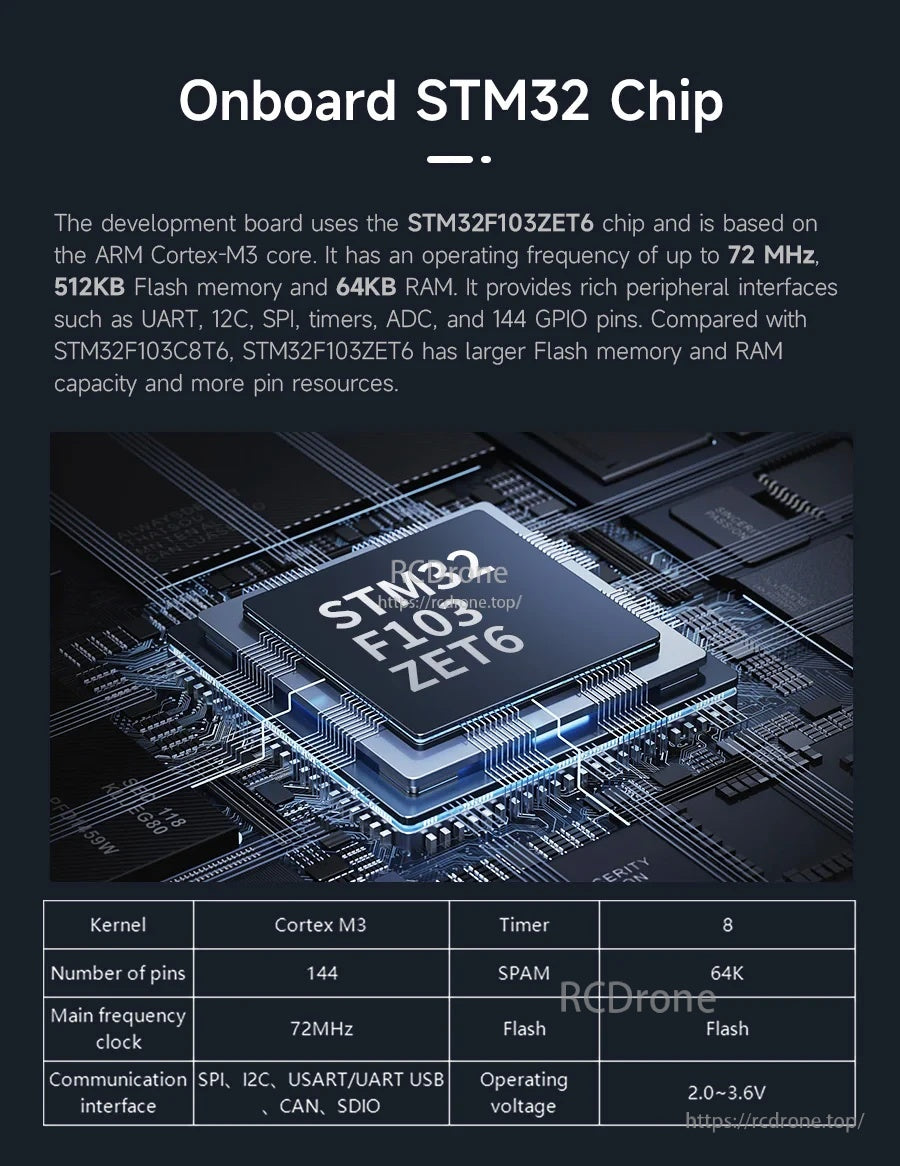
STM32F103ZET6 (Cortex‑M3) 提供高達 72MHz 的性能,擁有 512KB Flash 和 64KB RAM,適合需要大量擴展的構建。
逐步教程涵蓋 STM32 基礎知識、外設驅動程序和智能車功能開發。

板載外圍設備支持實用操作,如OLED狀態顯示、蜂鳴器警報、紅外解碼和傳感器數據收集。

演示項目包括超聲波測距/避障、紅外障礙物跟隨,以及可選的無線或AI互動模塊。
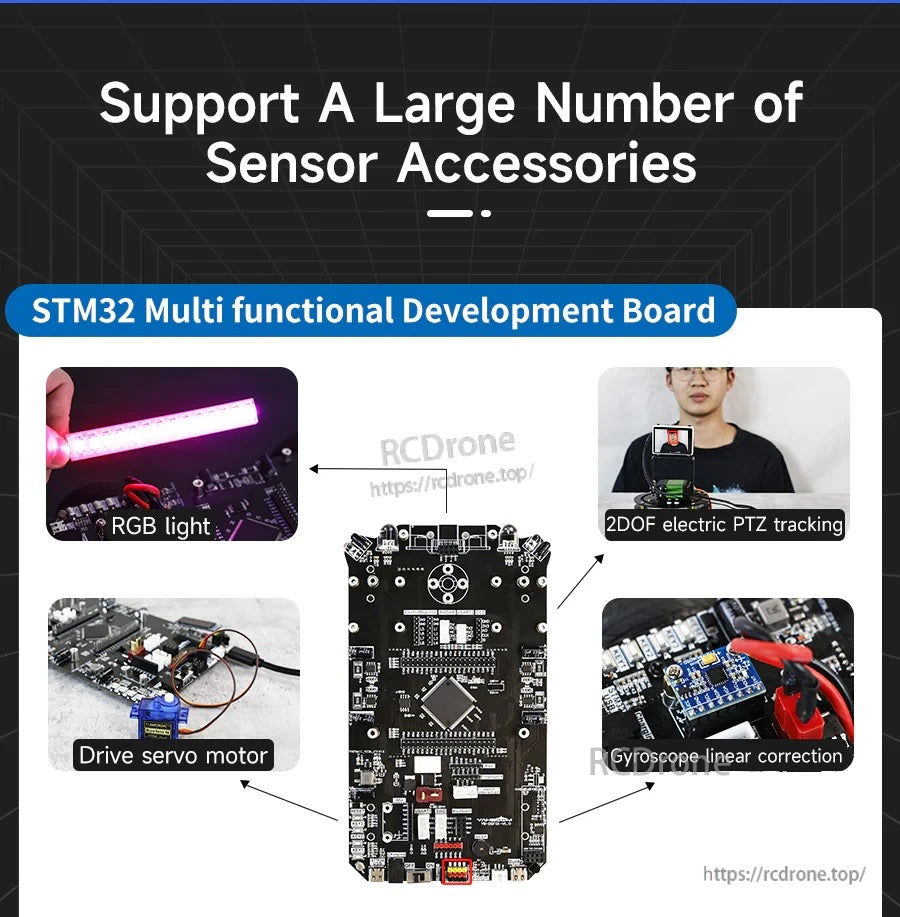
安裝點和接口使添加配件變得容易,如RGB燈光、伺服器、PTZ支架和陀螺儀模塊。

Type‑C編程、40‑pin GPIO接頭和封閉的電池盒有助於保持原型製作快速整潔。
清晰的連接器標籤有助於在啟動過程中更少出錯地連接UART/I2C/SPI設備、傳感器和電源。
提供板尺寸和安裝間距以計劃底盤配合和堆疊擴展佈局。
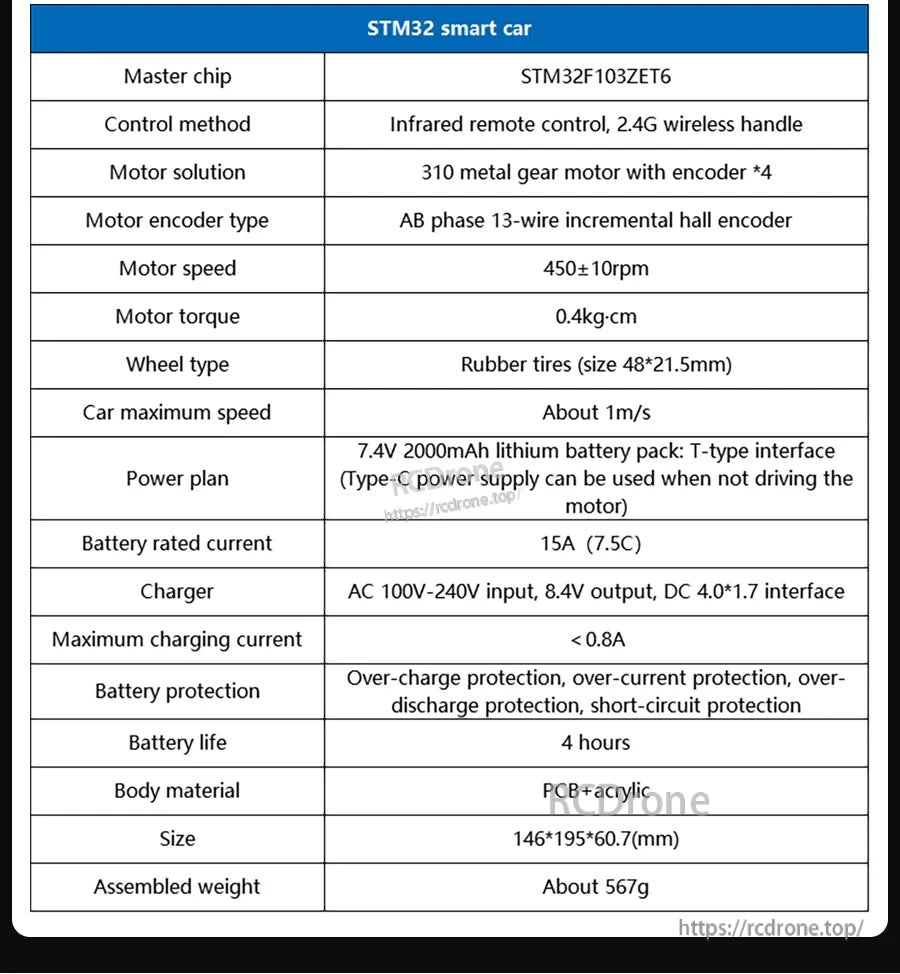
車側規格總結了控制選項、馬達/編碼器詳細信息以及完整構建的電池和充電信息。

在線訪問結構化學習資源,按主題組織,從快速入門到外圍設備和通信驅動程序。
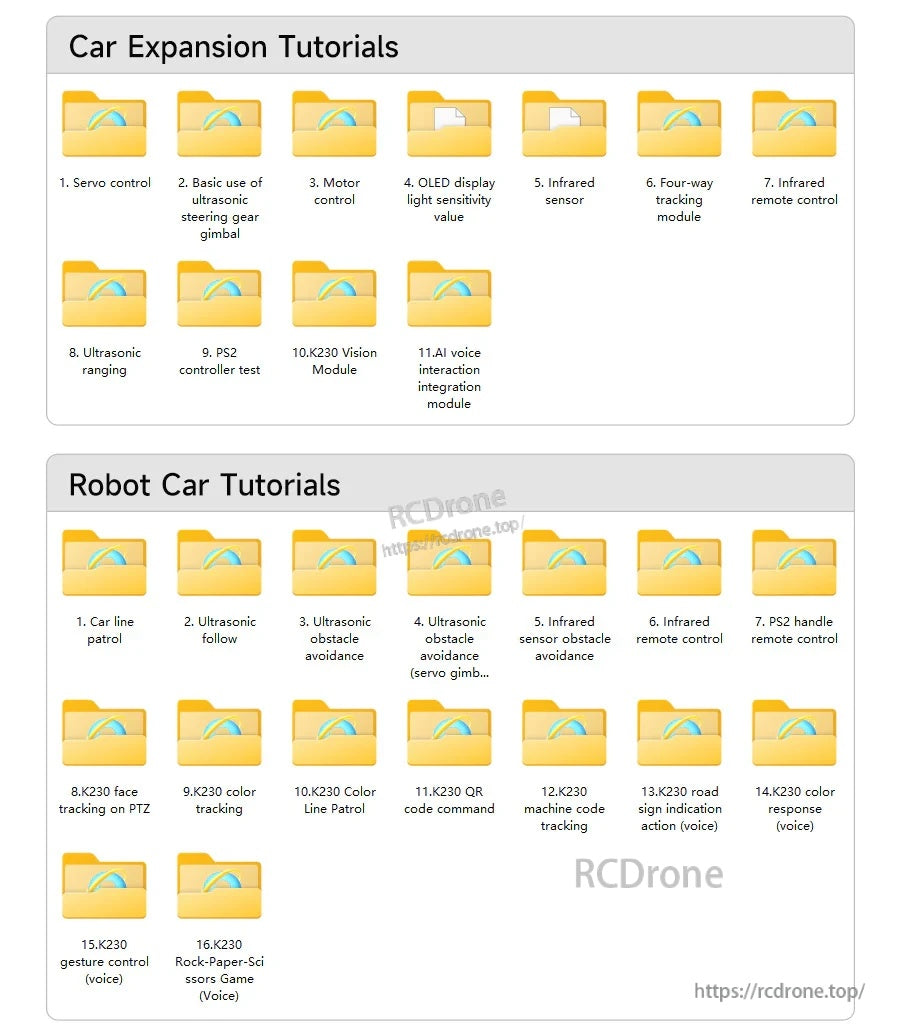
高級課程延伸到汽車擴展模塊和更高級別的機器人行為,如跟踪和避障。
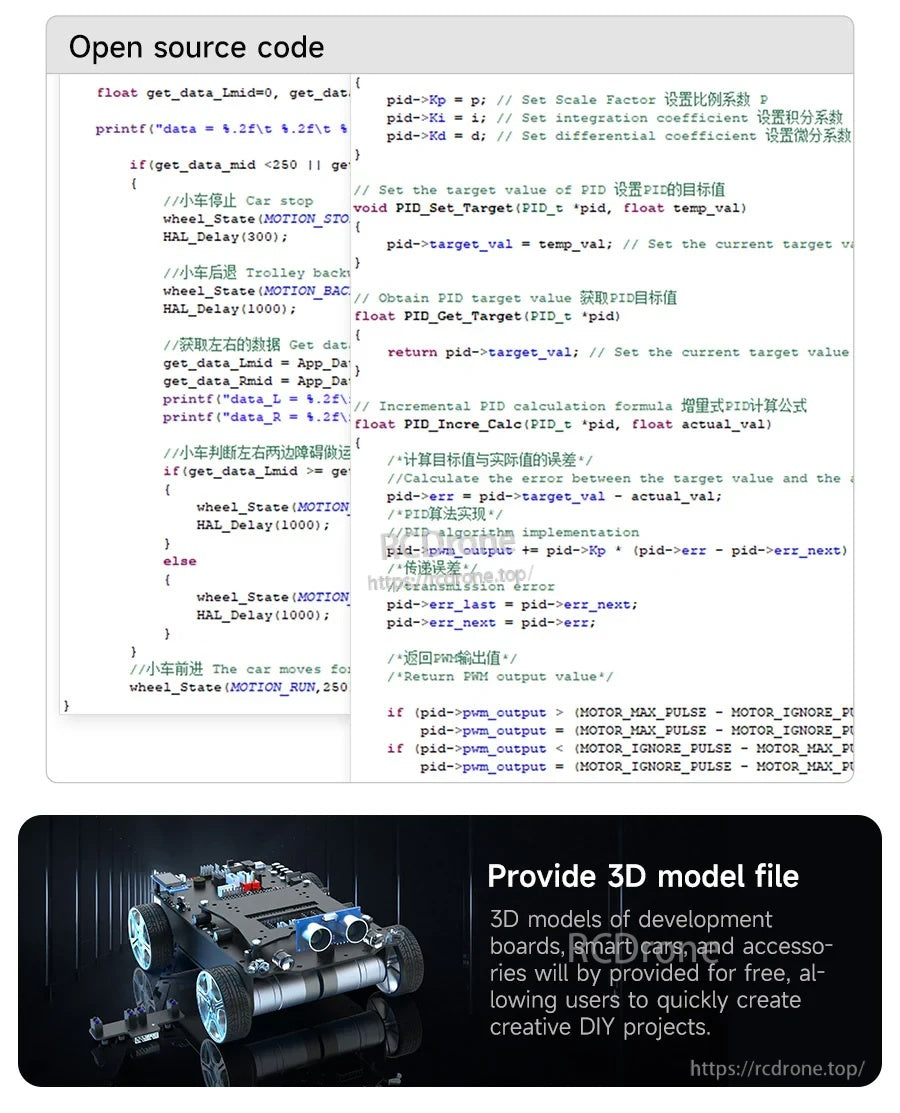
Yahboom STM32 智能車套件包括開源代碼資源和 3D 模型文件,以幫助簡化開發和定制。

該套件包括一個帶有超聲波傳感器模塊的 STM32 板、紅外遙控器、小型 OLED 顯示屏和用於設置的 USB 數據線。

標準套件捆綁了一個 STM32 板,帶有超聲波模塊、OLED 顯示屏、紅外遙控器、底盤板、車輪、編碼器馬達、電池以及基本電纜和硬件。
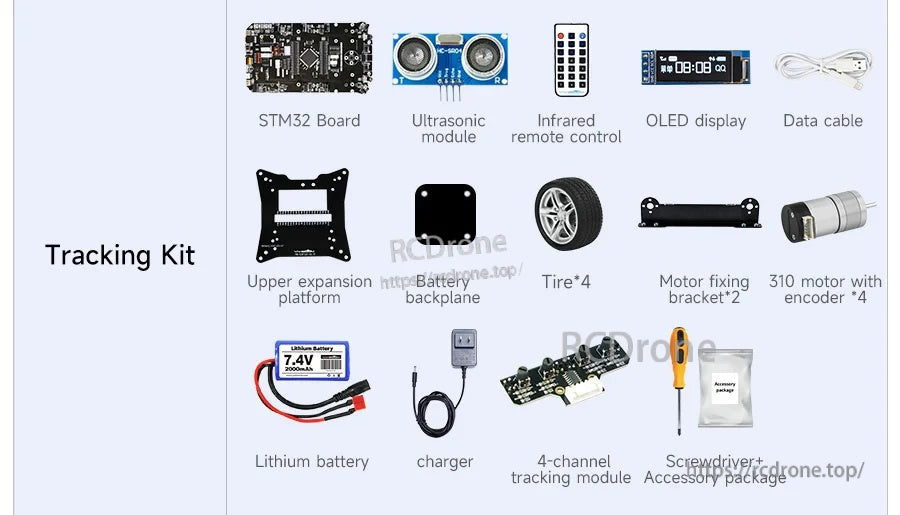
Yahboom STM32 智能車套件包括 STM32 控制板、超聲波模組、OLED 顯示屏、紅外遙控器、四個帶編碼器的馬達和輪子、7.4V 鋰電池和安裝配件。

Yahboom STM32 智能車套件包括 STM32 控制板、超聲波傳感器、OLED 顯示屏、紅外遙控器、2.4G 遊戲手柄、馬達、輪子、電池和充電器,用於構建和測試驅動控制。

該套件包括 STM32 控制板、超聲波模組、OLED 顯示屏、紅外遙控器、帶編碼器的馬達、輪子、電池和安裝硬件,用於構建智能車。

Yahboom STM32 智能車套件捆綁了 STM32 控制板、超聲波傳感器、紅外跟踪模組、OLED 顯示屏、編碼器馬達、輪子和充電配件,提供完整的構建。
















- 選擇項目後,整個頁面將重新整理。
- 在新視窗中開啟。