u-blox ZED-F9P-01B GNSS RTK 板 (ZED-F9P-01B-00) USB-C, UART, I2C, SPI, SMA/U.FL
u-blox ZED-F9P-01B GNSS RTK 板 (ZED-F9P-01B-00) USB-C, UART, I2C, SPI, SMA/U.FL
RCDrone
定價
$155.00 USD
定價
$0.00 USD
售價
$155.00 USD
單價
每
已包含稅額。
結帳時計算運費。
無法載入取貨服務供應情況
概述
這款 ZED-F9P GNSS/RTK 板基於標記為 ZED-F9P-01B-01 的 u-blox 模組(板標記:ZED-F9P-01B-00)。它支持多種主機連接,包括 USB Type-C(虛擬 COM/串行)、UART(3.3V 電平)、I2C(Qwiic 總線)和 SPI,適合與需要串行/I2C/SPI 控制的系統集成,如 Pixhawk 自動駕駛儀、Raspberry Pi 和微控制器(包括 ESP32)。
主要特點
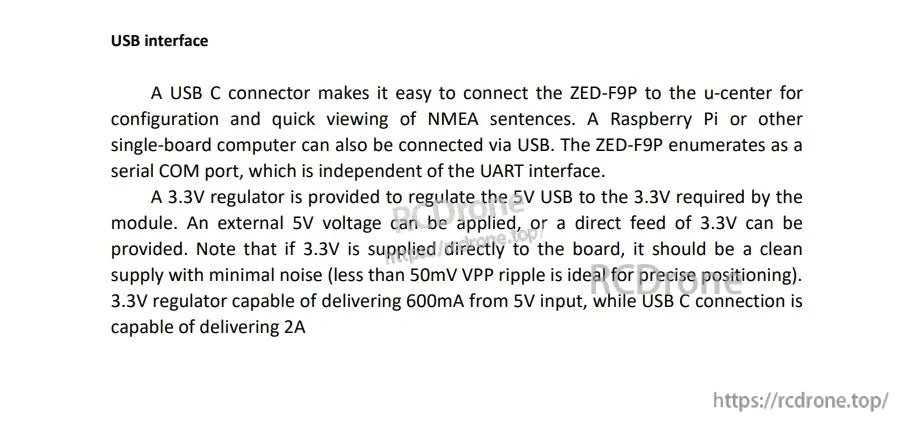
- USB 接口(USB Type-C): 連接到 u-center 以進行配置和快速查看 NMEA 語句;獨立於 UART 接口作為串行 COM 端口枚舉。
- 電源選項: 板載 3.3V 穩壓器將 5V USB 調節至模組所需的 3.3V;可以應用外部 5V,或提供直接的 3.3V 供電。
- 低噪聲 3.3V 注意: 如果 3.3V 直接供電給主板,建議使用清潔的供電,噪音最小(理想的 VPP 漂移小於 50mV 以實現精確定位)。
- 與 Pixhawk 兼容的 J3 端口: GH1.25-6P 連接器可以連接到 Pixhawk 自動駕駛儀,並且也可以用來為主板供電。
- 雙天線接口: 一個 SMA 外部連接器和一個 U.FL (IPEX) 插座;任一者均可使用。
- 狀態 LED: 電源、PPS、RTK 和 FENCE 的操作狀態指示。
規格
| 板標記 | ZED-F9P-01B-00 |
| GNSS模組標記 | u-blox ZED-F9P-01B-01 |
| USB連接器 | USB Type-C |
| USB功能 | 作為串行COM端口列舉(獨立於UART);支持u-center配置和NMEA查看 |
| 電源調節 | 提供3.3V穩壓器以將5V USB調節至模組所需的3.3V |
| 電源輸入選項 | USB 5V;外部5V;直接3.3V供電 |
| 3.3V供電噪聲注意事項 | 理想情況下,直接供應3.3V時,VPP波動應小於50mV |
| 3.3V 調節器能力 | 從 5V 輸入提供 600mA |
| USB-C 供電能力 | 2A |
| 介面(板級) | UART, I2C (Qwiic 總線), SPI, USB |
| 天線介面 | SMA; U.FL (IPEX) |
| 狀態 LED | 電源, PPS, RTK, FENCE |
端口, 引腳配置 & 指示燈
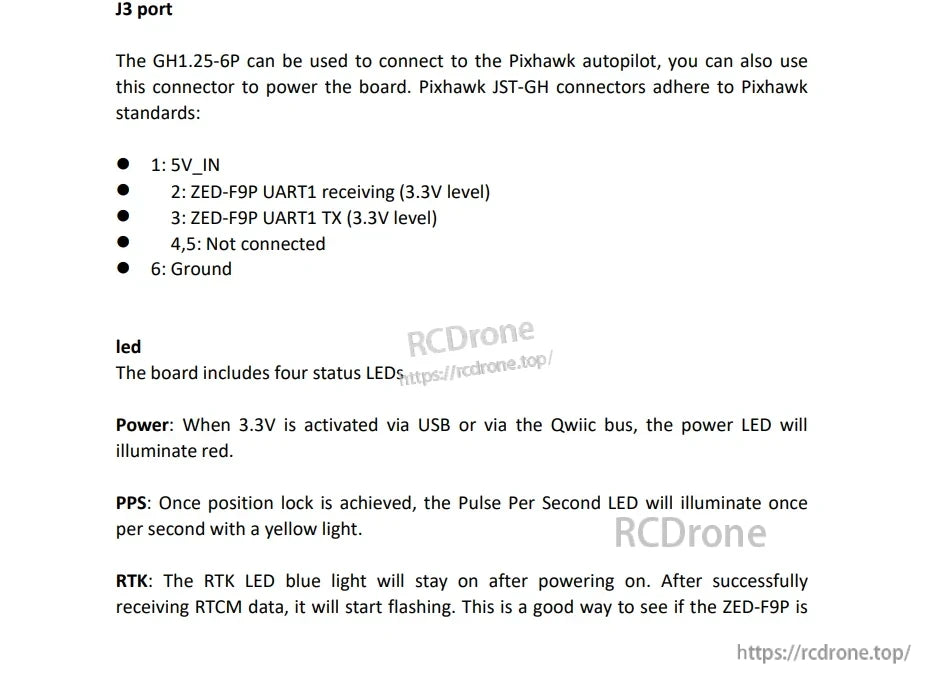
J3 端口 (GH1.25-6P, Pixhawk JST-GH)
- 1: 5V_IN
- 2: ZED-F9P UART1 接收 (3.3V 電平)
- 3: ZED-F9P UART1 TX (3.3V 電平)
- 4,5: 未連接
- 6: 地
LED 行為
- 電源: 當 3.3V 通過 USB 或 Qwiic 總線啟動時,電源 LED 會顯示紅色。
- PPS: 一旦達到位置鎖定,PPS LED 每秒以黃色燈光閃爍一次。
- RTK: RTK LED 藍燈在開機後保持亮起。在成功接收 RTCM 數據後,開始閃爍。在獲得 RTK 固定後,LED 會熄滅。
- 圍欄: 圍欄 LED 可配置為在地理圍欄應用中開啟/關閉。
板上可見的標題標籤
- 左側: GND, 3V3, SDA, SCL, FENCE, RTK, PPS, RST, SAFE, INT
- 右側: GND, 5V, 3V3, TX2, RX2, CS, RXMOSI, TXMISO, SCK
應用
- 通過 JST-GH (J3) 為基於 Pixhawk 的平台提供 GNSS/RTK 定位集成
- 使用 USB Type-C 設置和 NMEA 查看 u-center
- 使用 UART (3 的嵌入式集成。3V)、I2C/Qwiic,或SPI與單板計算機和微控制器(包括ESP32)
如需售前問題或整合支援,請聯繫支援團隊 https://rcdrone.top/ 或發送電子郵件至 [email protected].
詳情

ZED-F9P-01B-00 RTK GNSS 板提供 USB-C 接口,清晰標示的引腳接頭,以及 U.FL 天線連接,便於整合。
USB-C 接口將 ZED-F9P 連接到 u-center 或 Raspberry Pi,並包括板載 5V 到 3.3V 的調節器。
J3 JST-GH 6 引腳連接器引腳圖和四個狀態 LED 使得連接到 Pixhawk 風格的自動駕駛儀和基本故障排除變得簡單。
ZED-F9P 板支持 SMA 和 U.FL(IPEX)天線連接,並包括可配置的 FENCE LED 用於地理圍欄狀態。