






ZeroOne X6 Pro 自動駕駛飛行控制器 FMU v6X STM32H753,三重 IMU,100M 乙太網路,PWM 3.3V/5V
ZeroOne X6 Pro 自動駕駛飛行控制器 FMU v6X STM32H753,三重 IMU,100M 乙太網路,PWM 3.3V/5V
ZeroOne
無法載入取貨服務供應情況
概述
ZeroOne X6 Pro 是一款基於開源 FMU v6X 架構(Pixhawk 連接器標準 DS-009)的自動駕駛飛行控制器,專為高振動環境設計,並支持 ArduPilot 和 PX4 韌體。它集成了工業級傳感器,內置減震,三重 IMU 冗餘,IMU 溫度補償,以及 100 Mbit 以太網接口以擴展連接性。
主要特點
- FMU v6X 開源硬體標準(顯示 Pixhawk 連接器標準 DS-009 兼容性)
- 處理器:STM32H753;集成加密/哈希處理器(如所述);主頻提高至480MHz;2M FLASH;1M RAM
- 工業級傳感器,具有高抗振性、低噪音和低溫漂移(如所述)
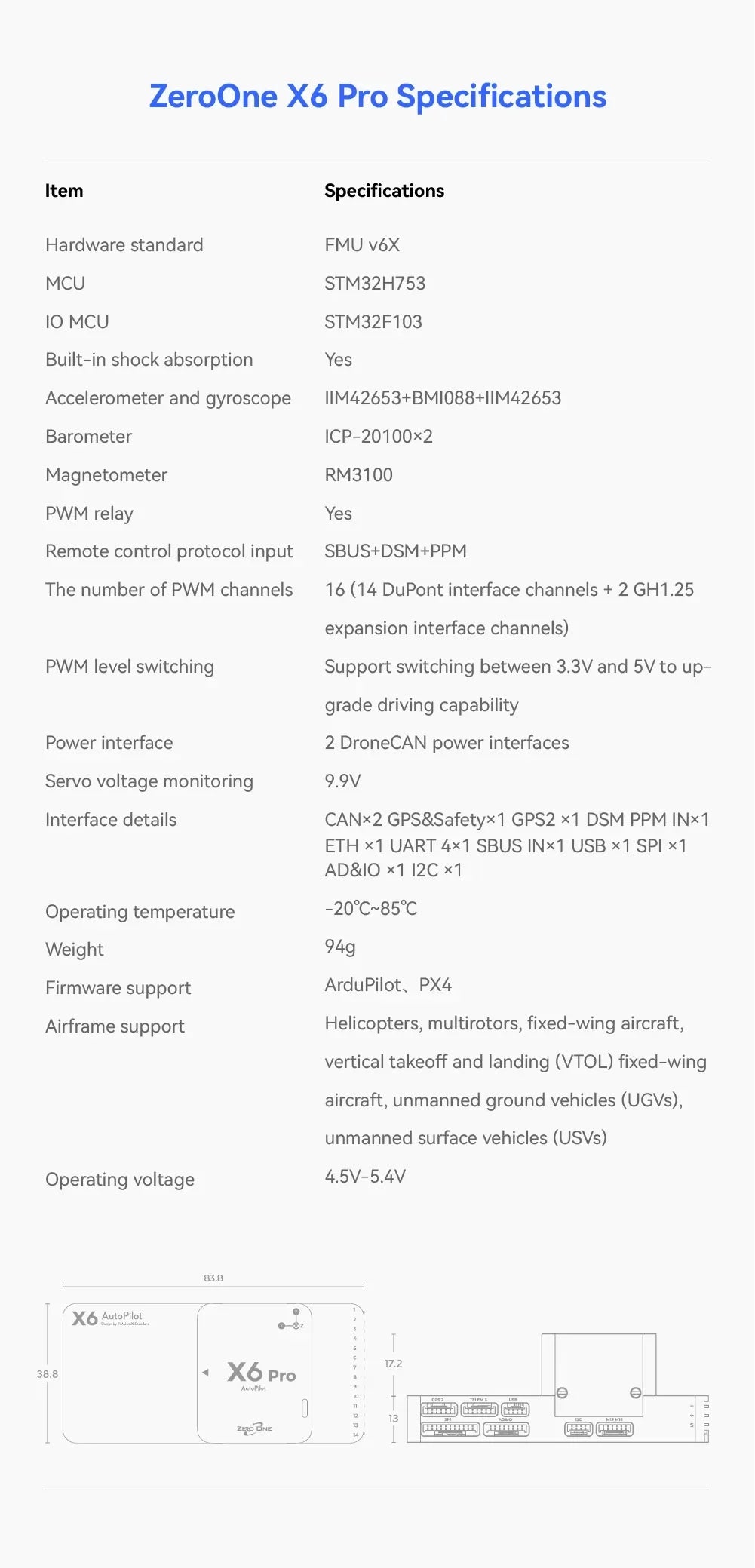
- 三重 IMU 冗餘和多傳感器冗餘架構(如所述)
- IMU 溫度補償(加熱功率提高了100%,如所述)
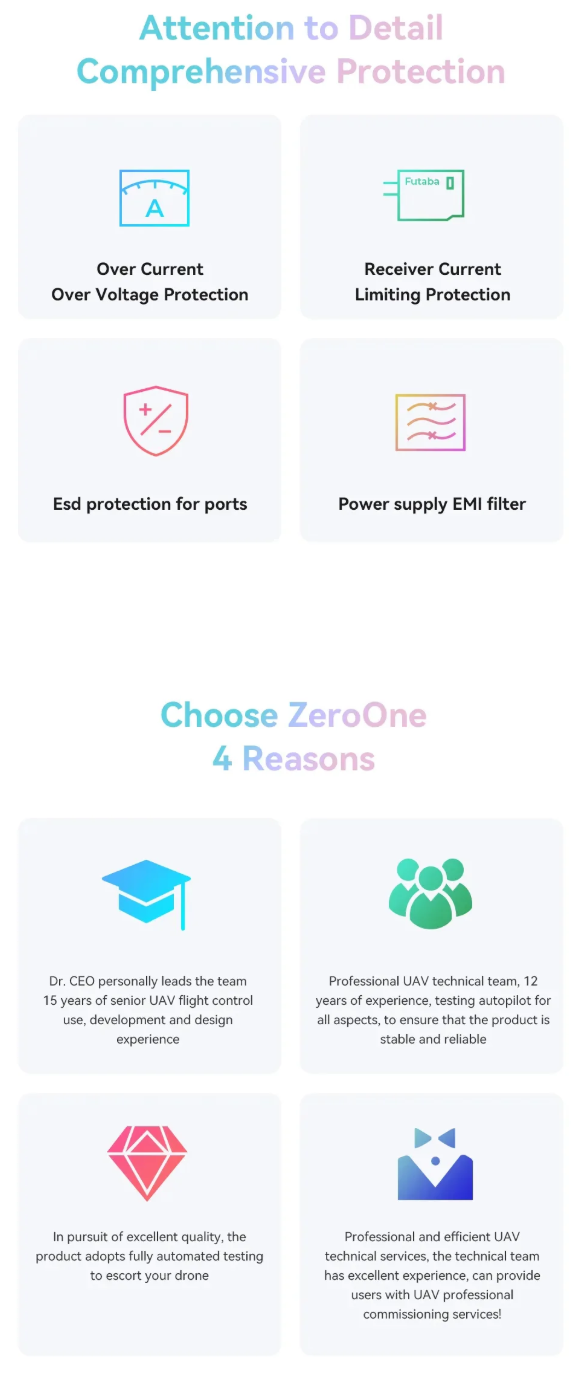
- PWM 驅動能力,具有3。3V/5V PWM 電平/電壓切換支援
- 保護特性: 過電流/過電壓保護;接收器電流限制保護;端口的靜電放電保護;電源 EMI 濾波器
- 100 Mbit 以太網 接口 (ETH x1) 用於連接外部計算/外圍設備 (示例平台包括 Raspberry Pi 和 Nvidia Jetson 系列開發套件)
- DroneCAN 支援通過電源接口 (列出 2 個 DroneCAN 電源接口)
規格
| 硬體標準 | FMU v6X |
| MCU | STM32H753 |
| IO MCU | STM32F103 |
| CPU 頻率 (如所述) | 480MHz |
| 記憶體 (如所述) | 1M RAM |
| 閃存 (如所述) | 2M FLASH | 內建減震 | 是 |
| 加速度計和陀螺儀(規格表) | IIM42653 + BMI088 + IIM42653 |
| 材料中提到的陀螺儀 | ICM45686(在功能文本中提到);IIM42653(在ArduPilot代碼註釋和規格表中提到) |
| 氣壓計 | ICP-20100 x2 |
| 磁力計 | RM3100 |
| PWM繼電器 | 是 |
| 遙控協議輸入 | SBUS + DSM + PPM |
| PWM通道數量 | 16(14個DuPont接口通道 + 2個GH1.25 擴展介面通道) |
| PWM 電平切換 | 支持在 3.3V 和 5V 之間切換以提升驅動能力 |
| 電源介面 | 2 個 DroneCAN 電源介面 |
| 伺服電壓監控 | 9.9V |
| 介面詳情 | CAN x2; GPS&安全 x1; GPS2 x1; DSM PPM IN x1; ETH x1; UART 4 x1; SBUS IN x1; USB x1; SPI x1; AD&IO x1; I2C x1 |
| 工作溫度 | -20°C~85°C |
| 工作電壓 | 4.5V~5.4V |
| 重量 | 94克 |
| 固件支持 | ArduPilot, PX4 |
| 機架支持 | 直升機;多旋翼;固定翼飛機;垂直起降(VTOL)固定翼飛機;無人地面車輛(UGVs);無人水面車輛(USVs) |
| 外形尺寸(如圖所示) | 83.8 毫米;38.8 毫米;17.2 毫米;13 毫米 |
工業級傳感器(圖表值顯示)
| 陀螺儀 | ||
| 範圍 (°/s)(數值越大越好) | X6 Pro 傳感器:4000 | ADIS16470:2000;ICM20649:4000;ICM20689:2000 |
| 均方根噪聲 (°/s/sqrt(Hz))(數值越小越好) | X6 Pro 傳感器:0.005 | ADIS16470:0.008;ICM20649:0.0175;ICM20689:0.006 |
| 交叉敏感度 (%) (越大越好) | X6 Pro 感測器: 1.25 | ADIS16470: 0.1; ICM20649: 2; ICM20689: 2 |
| 靈敏度溫度漂移 (°/s/°C) (越小越好) | X6 Pro 感測器: 0.005 | ADIS16470: 0.25; ICM20649: 2; ICM20689: 1.5 |
| 加速度計 | ||
| 範圍 (g) (越大越好) | X6 Pro 感測器: 32 | ADIS16470: 40; ICM20649: 30; ICM20689: 16 |
| 均方根噪聲 (mg) (越低越好) | X6 Pro 感測器: 0.7 | ADIS16470: 2.3; ICM20649: 2.85; ICM20689: 1.5 |
| 交叉敏感度 (%) (越低越好) | X6 Pro 感測器: 1 | ADIS16470: 0.1; ICM20649: 2; ICM20689: 2 |
| 靈敏度溫度漂移 (%/°C) (越小越好) | X6 Pro 感測器: 0.005 | ADIS16470: 0.002; ICM20649: 0.026; ICM20689: 1 |
應用
- 直升機
- 多旋翼飛行器
- 固定翼飛行器
- 垂直起降固定翼飛行器
- 無人地面車
- 無人水面船
手冊
客戶服務: [email protected] (或訪問 https://rcdrone.top/).
詳情
ZeroOne X6 Pro 飛行控制器具備工業級傳感器、高精度、低噪音和強大的 PWM 驅動能力。專為大載重飛行器設計,使用開源 FMU v6X 架構,與 Pixhawk 兼容。
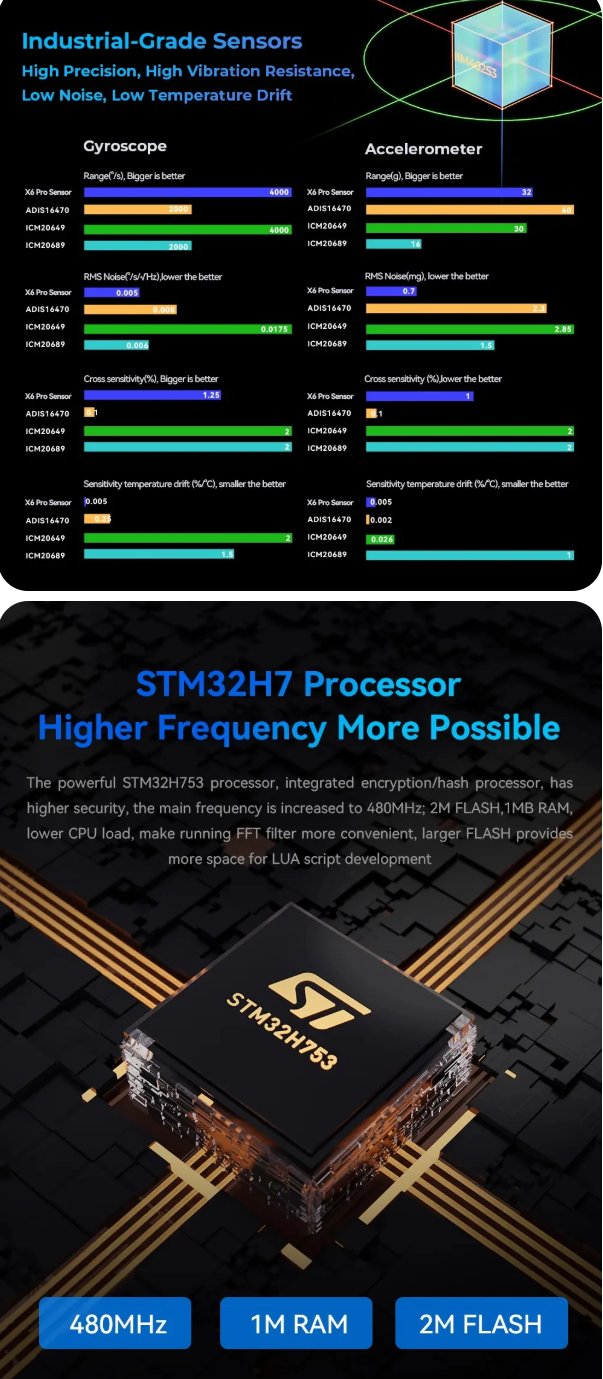
ZeroOne X6 Pro 使用工業級傳感器,具有高精度、低噪音和抗震性能。它搭載480MHz的STM32H753處理器,擁有1MB RAM、2MB FLASH、增強的安全性、FFT濾波和LUA腳本支持。
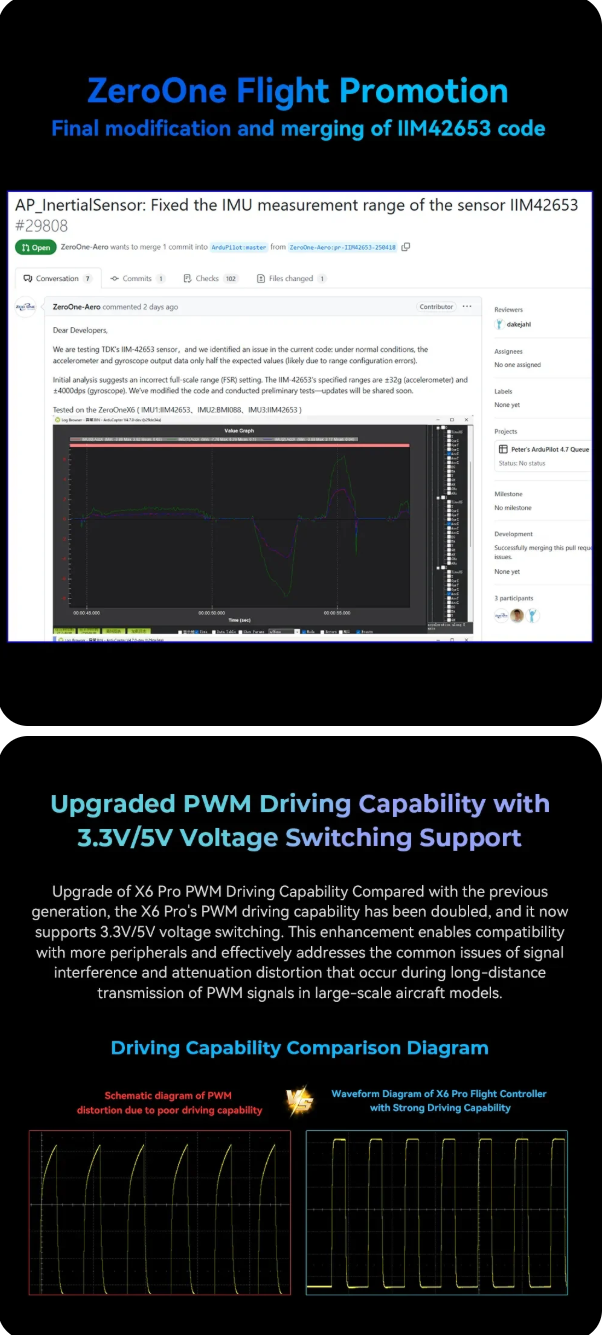
ZeroOne X6 Pro增強了PWM驅動,具備3.3V/5V切換,雙倍能力以減少信號失真。IMU傳感器範圍修正針對IIM42653確保準確測量,改善飛行穩定性和周邊兼容性。
ZeroOne X6 Pro提供全面保護:過電流、過電壓、ESD和EMI濾波。擁有超過15年的無人機專業經驗,專業團隊確保可靠性、自動化測試和高效技術支持,以實現最佳無人機性能。

ZeroOne X6 Pro配備減震海綿以增強穩定性,減少振動和噪音,並包括100M以太網接口,用於SLAM、視覺追蹤和與Raspberry Pi或Jetson集成的先進無人機功能。
ZeroOne X6 Pro支持150V 200A,與ArduPilot和PX4兼容。特點包括 DroneCAN、雙電源供應、冷卻風扇,適用於專業飛行控制的直升機、多旋翼、飛機、垂直起降(VTOL)、無人地面車(UGV)、無人水面船(USV)模型。
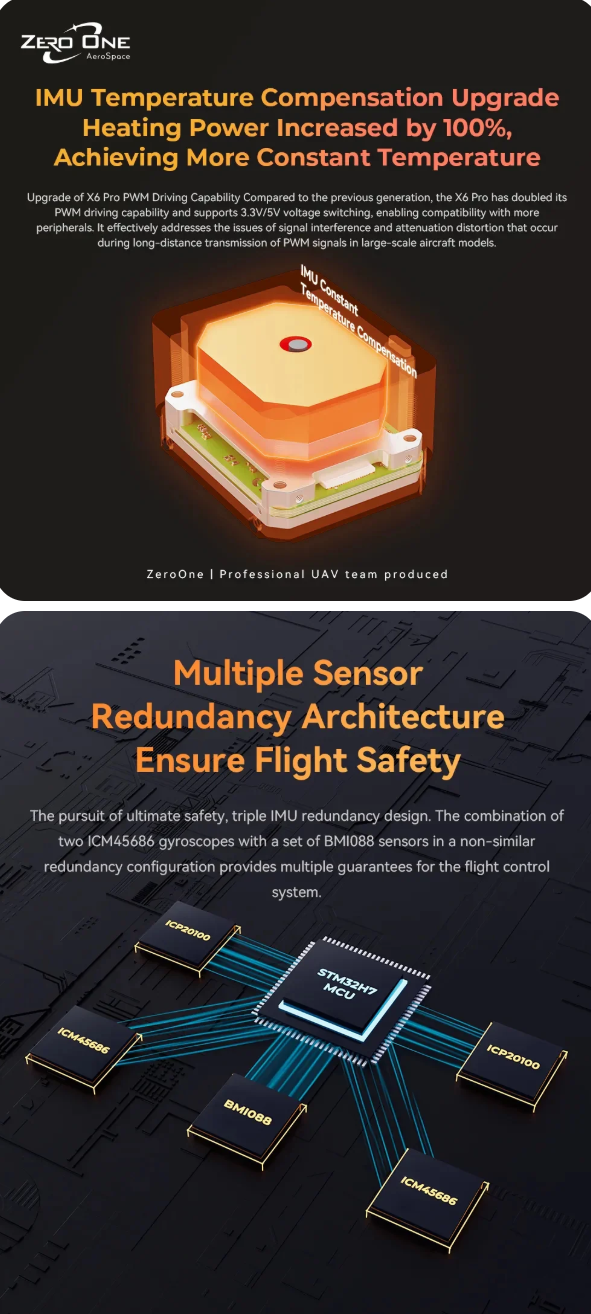
ZeroOne X6 Pro 增強了 IMU 溫度補償,雙倍加熱功率,並通過與 STM32H7 MCU 連接的 ICM45686 和 BMI088 傳感器實現三重 IMU 冗餘,確保飛行安全。
ZeroOne X6 Pro 擁有 FMU v6X、STM32 MCU、16 個 PWM 通道、雙 DroneCAN 電源、9.9V 伺服監控、-20°C–85°C 操作、94 克重量,並支持 ArduPilot/PX4 用於直升機、多旋翼、垂直起降(VTOL)、無人地面車(UGV)和無人水面船(USV)。






