





Feetech SCS20 - 6V 20kg.cm 360 Degree Magnetic code Serial Control TTL Servo 20kg scs servo Bus Packet Communication
Feetech SCS20 - 6V 20kg.cm 360 Degree Magnetic code Serial Control TTL Servo 20kg scs servo Bus Packet Communication
Feetech
140 orders in last 90 days
Couldn't load pickup availability
Warehouse: China/USA/Europe, can delivery to all countries;
Free Shipping: 9-15 days;
Express Shipping: 5-8 days;
Return&Refund: 30 Days.
SPECIFICATIONS
Brand Name: Feetech
Origin: Mainland China
Material: Plastic
Plastic Type: PC
RC Parts & Accs: Batteries - LiPo
Size: 10*10*10
For Vehicle Type: Cars
Use: Vehicles & Remote Control Toys
Upgrade Parts/Accessories: Lithium Battery
Remote Control Peripherals/Devices: Remote Controller
Tool Supplies: Battery
Quantity: 1 pcs
Technical parameters: KV1100
Model Number: SCS20-360T
Four-wheel Drive Attributes: Motors
Wheelbase: Screws
Model Number: STS3020
Size: 40 X 20 X 40.5mm
Weight: 62g
Gear type: Copper and aluminum
Limit angle: NO limit
Bearing: 2 Ball bearings
Horn gear spline: 25T(4.96mm)
Motor: Metal brush motor
Operating Voltage Range: 6-7.4V
Peak stall torque: 20kg.cm@6V
Rated torque: 6.6kg.cm@6V
Protocol Type: Half Duplex Asynchronous Serial Communication
Case: Aluminium&Plastic
|
1.Apply Environmental Condition 4-1 Idle current(at stopped) 10mA 10mA
Electronic control Function:
1.Acceleration start stop function: speed and acceleration value can be set, motion effect is more gentle. 2.High precision, 360 degree absolute position 4096 bit precision, the highest position resolution is 0.088 degrees, if the control is 90 degrees, input 4096 / 360 * 90 = 1024, if the control is 180 degrees, input 4096 / 360 * 180 = 2048, so as to calculate. 3.There are four working mode switching (mode 0 position servo, mode 1 speed closed-loop, mode 2 speed open-loop, mode 3 step servo). 1)、Mode 0:Location mode, the default mode. In this mode, 360 degree absolute angle control can be realized. Support acceleration movement. 2)、Mode 1:Speed closed-loop, in the programming interface, the operation mode is set to 1, switch to speed closed-loop mode, and enter the corresponding speed in the speed column to run. 3)、Mode 2:Speed open-loop, in the programming interface, the operation mode is set to 2, switch to speed open-loop mode, and enter the corresponding time in the time column to run. 4)、Mode3:Step mode: in the programming interface, the maximum / minimum angle limit is set to 0, and the operation mode is set to 3. Switch to step mode. Enter the position in the position bar to step towards the target position. Click the position again to continue to step in the same direction. 4、Multi turn mode, 360 degree absolute control and feedback, under the highest accuracy, the absolute position control can be plus or minus 7 turns, but the number of power cycles is not saved, only the absolute position feedback value is retained. 5、One key calibration, 360 degree angle installation at any position, (40 (decimal) address input 128 (decimal)) one key correction current position is the middle (2048 (decimal)). 6、TTL communication level, half duplex asynchronous communication, bus protocol support to adjust read and write parameters, and add synchronous read function (send an instruction to receive the read back instruction from each servo on the bus in turn.) 7、Multiple protections, (overload, overcurrent, overvoltage, overheating, switch setting, condition parameter changing) 1)、Overload protection: through position detection, during the movement from the starting position to the target position, when the current position is detected to be not the target position after encountering the blocking of obstacles, the unloading force lasts for 2S (20% of the default blocking force). Until a new command is triggered, Release protection 2)、Overcurrent protection: through the set current value, check whether the current reaches the set current value. When it reaches the set current value, release the force (the default torque is 0). Until a new command is triggered, Release protection 3)、Over voltage protection: detect the current voltage value. If it exceeds the set voltage value, the alarm will display over-voltage. 4)、Overheat protection: detect the current motor temperature. If the temperature exceeds the set value, the alarm will display overheat. 8:Multiple feedback: 1)Load feedback: the current control output drives the voltage duty cycle of the motor, and the full scale is 1000 = 100% torque output. 2)Current feedback: The servo working current, 1 = 6.5mA 3)Voltage feedback: The servo working voltage,70=7V,0.1V 4)Temperature feedback: internal working temperature of current servo(measuring temperature)。 5)Speed feedback: feedback the speed of current motor rotation, and the number of steps in unit time (per second) 9、Open PID parameters. |




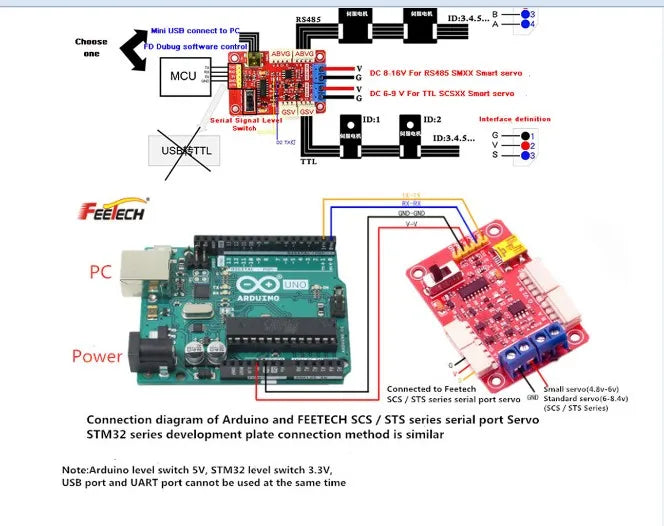
>hmni USB unmChu Chontc Dubuq ior contfo A8-zi DC R I6y Fr RSRS Shr Smuc] >hrtu MCU DC EBYFor ECsX Smor keno 5eal 6i00.






Drone Categories
-

All Drones
All Drones This includes a wide variety of drone The...
-

Mini Drone
The characteristics of mini drones are small size, light weight, portable, short...
-

Camera Drone
Camera Drone is very suitable for photography enthusiasts, basically equipped with 3-axis...
-

Agriculture Drone
What is Agriculture Drone? Agriculture drones, also known as precision agriculture drones...
-

Rc Helicopter
RC helicopters, also known as remote-controlled helicopters, are miniature aircraft that are...
-

Drone Battery
Drone Battery, the most common batteries used in drones are lithium polymer (LiPo)...
-

Drone Motor
Drone Motors, FPV Motors,Airplane Motors,Helicopter Motors, Car Motors. Drone motors are classified...
-

Drone Propeller
Drone Propeller: A drone propeller is a rotating component that generates thrust...
-

Drone Remote Controller
Drone Remote Controller, Transmitter When choosing a remote controller for a drone,...
-

Drone Transmitter & Receiver
Drone Transmitter & Drone Receiver FPV Transmitter & FPV Receiver Drone Transmitter and...
-

Accessories
Drone Accessories Quadcopter Frame. This is a structure (frame) in which all...














