لوحة استقبال ZED-F9P-01B-01 RTK GNSS، USB-C، UART2 RTCM3، SMA & U.FL هوائي، Pixhawk GH1.25-6P
لوحة استقبال ZED-F9P-01B-01 RTK GNSS، USB-C، UART2 RTCM3، SMA & U.FL هوائي، Pixhawk GH1.25-6P
RCDrone
تعذر تحميل توفر الالتقاط
نظرة عامة
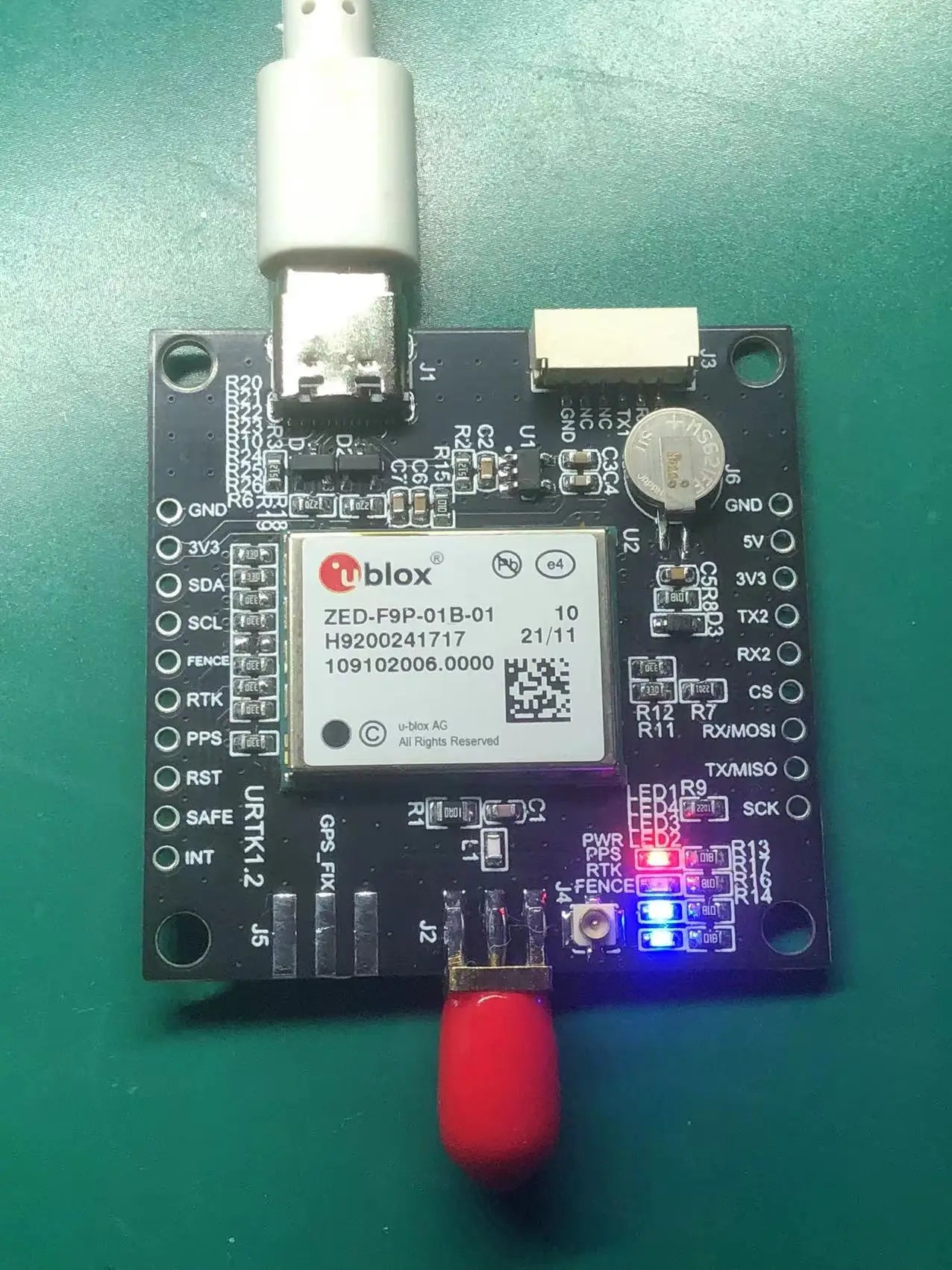
تستند لوحة استقبال GNSS هذه إلى وحدة u-blox ZED-F9P-01B-01 وتوفر دعم تحديد المواقع التفاضلي RTK مع USB-C، وأطراف UART/SPI، وخيارات توصيل هوائي مزدوج للتكامل في أنظمة الروبوتات، والطيران الآلي، والملاحة.
الميزات الرئيسية
- واجهة USB: اتصال USB من النوع C للتكوين مع u-center وعرض سريع لجمل NMEA؛ يتم التعرف عليه كمنفذ COM تسلسلي مستقل عن واجهة UART.
- خيارات الطاقة: منظم 3.3 فولت على اللوحة يحول 5 فولت USB إلى 3.3 فولت المطلوبة من قبل الوحدة؛ يدعم إدخال 5 فولت خارجي أو تغذية مباشرة 3.3 فولت.
- توصية بتغذية 3.3 فولت منخفضة الضوضاء: عند تزويد 3.3 فولت مباشرة، يُوصى بتغذية نظيفة مع الحد الأدنى من الضوضاء (أقل من 50 مللي فولت من تذبذب PVP يُعتبر مثاليًا للتحديد الدقيق للمواقع).
- مشاركة UART/SPI: تتوفر دبابيس تسلسلية كلاسيكية ولكنها مشتركة مع دبابيس SPI؛ بشكل افتراضي، يتم تمكين دبابيس UART. يجب أن يكون جسر DSEL في الجزء الخلفي من اللوحة مفتوحًا.
- معالجة RTCM3 على UART2: يتم استخدام منفذ تسلسلي ثانٍ (UART2) بشكل أساسي لبيانات تصحيح RTCM3؛ بشكل افتراضي، يقوم باستقبال وتحليل RTCM3 الواردة تلقائيًا لتمكين وضع RTK. في وضع محطة القاعدة، يقوم UART2 بإخراج بيانات تصحيح RTCM3.
- موصل الطيار الآلي: GH1.25-6P (معيار Pixhawk JST-GH) للاتصال بطيار آلي Pixhawk و/أو لتزويد اللوحة بالطاقة.
- موصلات الهوائي: يتم توفير واجهتين للهوائي: SMA (برغي خارجي، ثقب داخلي) و U.FL (IPEX)؛ يمكن استخدام أي منهما.
- LEDs الحالة: أربعة LEDs حالة (الطاقة، PPS، RTK، FENCE) للإشارة إلى النظام/RTK/تحديد المواقع الجغرافية.
المواصفات
| وحدة GNSS (تسمية الوحدة) | u-blox ZED-F9P-01B-01 |
| علامة اللوحة (مرئية في صورة اللوحة) | ZED-F9P-01B-00 |
| USB | USB نوع-C؛ يتم التعرف عليه كمنفذ COM تسلسلي (مستقل عن UART) |
| تسلسلي / SPI | دبابيس UART مشتركة مع دبابيس SPI؛ UART مفعل بشكل افتراضي؛ يجب أن يكون جسر DSEL في الخلف مفتوحًا |
| اتجاه دبوس UART (مشترك مع SPI) | TX/MISO = مخرج من ZED-F9P؛ RX/MOSI = RX إلى ZED-F9P |
| منفذ تسلسلي ثانٍ | UART2 (أساسي لبيانات تصحيح RTCM3؛ يمكنه إخراج RTCM3 في وضع محطة القاعدة) |
| تنظيم الطاقة | منظم 3.3V مزود لتنظيم 5V USB إلى 3.3V المطلوبة من الوحدة |
| خيارات إدخال الطاقة (المذكورة) | USB 5V، 5V خارجي، أو تغذية مباشرة 3.3V |
| ملاحظة ضوضاء إمداد 3.3V (المذكورة) | أقل من 50mV PVP تم ذكره كأمثل عند تزويد 3.3V مباشرة |
| قدرة منظم 3.3V (المذكورة) | 600mA من إدخال 5V |
| قدرة طاقة USB-C (المذكورة) | قادر على توفير 2A |
| منفذ J3 | GH1.25-6P (معيار Pixhawk JST-GH) |
| توزيع دبابيس J3 (معيار Pixhawk) | 1: 5V_IN؛ 2: استقبال ZED-F9P UART1 (مستوى 3.3V)؛ 3: ZED-F9P UART1 TX (مستوى 3.3V)؛ 4،5: غير متصل؛ 6: الأرض |
| مؤشرات LED (الموصوفة) | الطاقة (باللون الأحمر عند 3.3V نشط عبر USB أو حافلة Qwiic); PPS (أصفر، مرة واحدة في الثانية بعد قفل الموقع); RTK (أزرق: يعمل بعد الطاقة، يومض بعد استلام بيانات RTCM، ينطفئ بعد تثبيت RTK); FENCE (قابل للتكوين لتطبيقات الجغرافيا) |
| واجهات الهوائي | SMA و U.FL (IPEX); أي واجهة مقبولة |
| تسميات الرأس (طباعة حريرية، الجانب الأيسر) | GND، 3V3، SDA، SCL، FENCE، RTK، PPS، RST، SAFE، INT |
| تسميات الرأس (طباعة حريرية، الجانب الأيمن) | GND، 5V، 3V3، TX2، RX2، CS، RX/MOSI، TX/MISO، SCK |
التطبيقات
- تحديد المواقع RTK GNSS للطائرات بدون طيار، UGVs، الروبوتات، ونماذج الملاحة
- دمج GNSS Pixhawk/الطيران الآلي عبر JST-GH (GH1.25-6P) الاتصال التسلسلي
- إعدادات RTK المعتمدة على RTCM3 باستخدام UART2 لروابط بيانات التصحيح (راديو أو سلكي)
لأسئلة التوافق (اختيار UART/SPI، توصيلات RTCM3، الهوائيات، أو التكامل)، اتصل بالدعم على https://rcdrone.top/ أو عبر البريد الإلكتروني [email protected].
تفاصيل

تجمع لوحة الاستقبال ZED-F9P بين اتصال USB-C مع دبابيس الإدخال/الإخراج المميزة و U.FL موصل الهوائي لتسهيل التكامل.
يتصل واجهة USB‑C بـ ZED‑F9P إلى u‑center أو Raspberry Pi كمنفذ COM تسلسلي مستقل، مع تنظيم 3.3V على متن الطائرة من طاقة USB 5V.
تستخدم لوحة ZED-F9P دبابيس UART/SPI المشتركة ومنفذ تسلسلي ثانٍ (UART2) الذي يُستخدم عادةً لبيانات تصحيح RTCM3 لتمكين وضع RTK.
قائمة دبابيس موصل J3 GH1.25-6P Pixhawk تشمل 5V_IN، UART1 RX/TX (3.3V مستوى)، والأرض، ويستخدم اللوح أربعة مصابيح LED حالة للطاقة، وقفل PPS، ونشاط RTK/RTCM.
تقدم لوحة مستقبل GNSS ZED-F9P RTK خيارين لواجهة الهوائي - SMA و U.FL (IPEX) - لتركيب مرن.
Related Collections