




CASBOT Handle-L1 يد آلية، 11 DOF يد ماهرة بخمسة أصابع، RS485/CANFD/EtherCAT، 24~60 فولت
CASBOT Handle-L1 يد آلية، 11 DOF يد ماهرة بخمسة أصابع، RS485/CANFD/EtherCAT، 24~60 فولت
CASCAS
تعذر تحميل توفر الالتقاط
ملخص
CASBOT Handle-L1 عبارة عن يد روبوتية مصممة لتكون يدًا روبوتية متكاملة للغاية، متعددة الأغراض، خفيفة الوزن، وذات براعة عالية، من أجل الدقة والاستقرار وخفة الحركة في التلاعب الجسدي.
للحصول على دعم في اختيار المنتجات ودمجها، يرجى الاتصال بنا. [email protected] أو قم بزيارة https://rcdrone.top/.
الميزات الرئيسية
- 11 درجة من الحرية: 6 درجات حرية نشطة + 5 درجات حرية سلبية عبر 11 مفصلًا تعاونيًا؛ نسب 1:1 بين اليد البشرية.
- عمر تشغيلي طويل: يتجاوز التشغيل المستمر 1,000,000 دورة دون فشل؛ تصل دقة تحديد موضع تكرار طرف الإصبع إلى ±0.1 مم.
- قدرة التحميل: قوة طرف الإصبع >10 نيوتن لكل إصبع؛ قوة القبضة الكلية >10 كجم؛ قادر على رفع الأشياء بثبات >25 كجم.
- فتح/إغلاق سريع ومتكرر: <0.6 ثانية.
- نطاق قطر الإمساك: 16-95 مم؛ مناسب للأسطوانات والموشورات والكرات والأقراص والأجسام غير المنتظمة.
- بروتوكول واجهة مفتوحة مع أوامر مُعدة مسبقًا مدمجة؛ تسلسلات حركة مُبرمجة مسبقًا متوفرة.
- الواجهات: RS485/CANFD/EtherCAT (مدرجة أيضًا: CAN، RS-485، EtherCAT).
- توافق البرامج: Windows/Linux/MacOS/ROS2 (مدرج أيضًا: Win/Ubuntu/ROS/ROS2).
- خيار الإصدار الاحترافي مع معلمات الاستشعار اللمسي (انظر المواصفات).
تحديد
مقارنة الإصدارات (من جدول المواصفات الفنية)
| المعلمة | الطبعة القياسية | الإصدار الاحترافي (مع خاصية الاستشعار اللمسي) |
|---|---|---|
| أبعاد | 194 مم × 84 مم × 52 مم | 194 مم × 84 مم × 52 مم |
| وزن | حوالي 610 غرام | حوالي 610 غرام |
| درجات الحرية (DOF) | 11 (6 نشطة) | 11 (6 نشطة) |
| حمل القبضة الرأسية الساكنة | >10 كجم | >10 كجم |
| حمل ثابت أفقي/حمل رفع | >25 كجم | >25 كجم |
| دورات متواصلة بدون فشل | مليون دورة | مليون دورة |
| جهد التشغيل | 24~60 فولت | 24~60 فولت |
| التيار الساكن | 80 مللي أمبير | 80 مللي أمبير |
| تيار اللاحمل | 350 مللي أمبير | 350 مللي أمبير |
| واجهة الاتصال | RS485/CANFD/EtherCAT | RS485/CANFD/EtherCAT |
| توافق البرامج | ويندوز/لينكس/ماك أو إس/آر أو إس 2 | ويندوز/لينكس/ماك أو إس/آر أو إس 2 |
| قابلية التكرار/دقة تحديد المواقع المتكررة | ±0.1 مم | ±0.1 مم |
| قوة أطراف الأصابع الأربعة | >10 نيوتن | >10 نيوتن |
| سرعة الفتح/الإغلاق المتكررة | <0.6 ثانية | <0.6 ثانية |
| الحد الأدنى لقطر الإمساك | 16 مم | 16 مم |
| أقصى قطر للإمساك | 95 ملم | 95 ملم |
| نطاق قوة اللمس في أطراف الأصابع | غير متوفر | 0.15-20 نيوتن |
| دقة اللمس عند أطراف الأصابع | غير متوفر | 0.1 نيوتن |
| قوة الزناد اللمسية | غير متوفر | 0.15 شمالاً |
| تباين الاتساق بين نقاط التلامس | غير متوفر | ≤±10% |
| زمن الاستجابة اللمسية | غير متوفر | ≤5 مللي ثانية |
أرقام منشورة إضافية
| ارتفاع | 192 ملم |
| عرض | 80 مم |
| سماكة | 45 مم |
| الوزن (تقريبًا) | 600 غرام |
| نطاق الإمساك | 16-95 مم |
| قوة القبضة | قوة الضغط 14 نيوتن/قوة الضغط الجانبي 25 نيوتن |
| أنظمة التحكم | نظام الحلقة المغلقة للموضع/نظام الحلقة المغلقة الهجين للقوة والموضع |
التطبيقات
- منصات التلاعب المجسدة والروبوتات الشبيهة بالبشر.
- بحث & التعليم: تطوير الخوارزميات؛ تخصيص النظام.
- المهام المنزلية: سحب/تمرير المناديل، التقاط/وضع الطعام، التقاط/وضع الملابس، استلام/تمرير الماء.
- مهام العمل الإنتاجية: حفر الثقوب، شد البراغي، نقل المواد، الضغط على الأزرار.
- خدمة & التفاعلات التوجيهية: المصافحة، الإشارة، التلويح باليد.
كتيبات
تفاصيل

يستخدم CASBOT Handle-L1 تصميمًا مفصليًا بخمسة أصابع للتحكم الدقيق والبارع في التطبيقات الروبوتية.

تستخدم يد CASBOT Handle-L1 الخماسية الأصابع الماهرة 11 درجة من الحرية، حيث تجمع بين 6 مفاصل نشطة و 5 مفاصل سلبية من أجل حركة طبيعية.
تم وصف CASBOT Handle-L1 بأنه يدعم أكثر من مليون دورة متواصلة ودقة تحديد موضع تكرار طرف الإصبع بمقدار ±0.1 مم.

تتميز يد الروبوت CASBOT Handle-L1 بنظام تحكم تكيفي في القوة مع >قوة ضغط على أطراف الأصابع مقدارها 10 نيوتن لكل إصبع و >قوة قبضة إجمالية تبلغ 10 كجم للتعامل مع مجموعة واسعة من الأشياء.

يساعد بروتوكول الواجهة المفتوحة المزود بأوامر مسبقة الضبط على تبسيط عملية التكامل مع الأذرع الروبوتية وأنظمة التشغيل عن بعد.
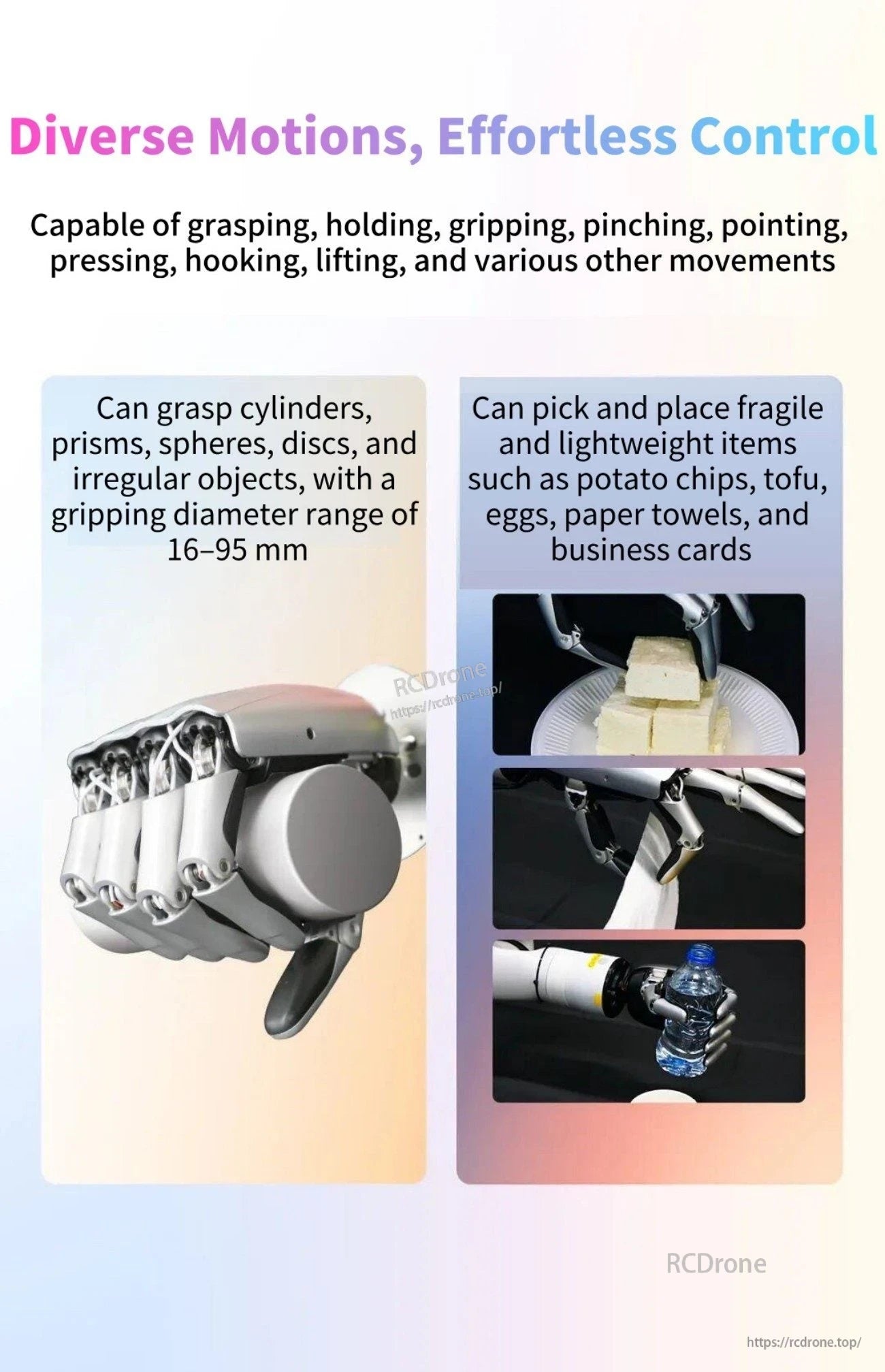
يدعم مقبض CASBOT Handle-L1 عمليات إمساك متنوعة بنطاق قطر إمساك يتراوح من 16 إلى 95 ملم ويمكنه التعامل مع العناصر الخفيفة والهشة مثل التوفو والزجاجات.

تم تقديم يد الروبوت CASBOT Handle-L1 للمهام المنزلية، والعمل الإنتاجي، وإيماءات الخدمة، وسير العمل البحثي أو التعليمي.

CASBOT Handle-L1 عبارة عن يد روبوتية ماهرة بخمسة أصابع مع 11 درجة حرية (6 نشطة + 5 سلبية) ودعم لتكامل CAN و RS-485 و EtherCAT.
Related Collections




