




مجموعة ذراع روبوتي CEREBOTO OpenArm 7DOF – تجميع ذاتي أو جاهز، تحكم مفتوح المصدر ROS/Python
مجموعة ذراع روبوتي CEREBOTO OpenArm 7DOF – تجميع ذاتي أو جاهز، تحكم مفتوح المصدر ROS/Python
CEREBOTO
تعذر تحميل توفر الالتقاط
نظرة عامة
ذراع الروبوت CEREBOTO OpenArm 7DOF هو ذراع روبوتي من الدرجة البحثية، بحجم إنساني، مصمم للجامعات والمختبرات والشركات الناشئة وصانعي المشاريع الجادة. مع 7 درجات من الحرية، ومدى ذراع يبلغ 633 مم، وحمولة نموذجية تبلغ 4.1 كجم وحمولة قصوى تبلغ 6.0 كجم لكل ذراع، يوفر OpenArm حركة عالية الدقة، وتفاعل جسدي آمن، وأدوات مفتوحة المصدر غنية.
يمكنك اختيار مجموعة أدوات الأجهزة DIY للتجميع الكامل بيديك، أو ذراع جاهزة للاستخدام تم معايرتها في المصنع. تتوفر تكوينات ذراع واحدة، وذراع مزدوج، وذراع رباعية.
الميزات الرئيسية
-
ذراع روبوتية بحجم إنساني 7DOF – مصممة لتتناسب مع طول ذراع إنسان يتراوح بين 160-165 سم للتلاعب الطبيعي والتشغيل عن بُعد.
-
حمولة عالية &وثبات – حمولة نموذجية 4.1 كجم، حمولة قصوى 6.0 كجم لكل ذراع، مع وزن ذراع خفيف يبلغ 5.5 كجم.
-
محركات قابلة للقيادة &وبنية متوافقة – تفاعل آمن وسلس للتعاون بين الإنسان والروبوت والمهام التي تتطلب التحكم في القوة.
-
حلقة تحكم CAN-FD بتردد 1 كيلوهرتز – تحكم في الوقت الحقيقي ومنخفض الكمون لتطبيقات البحث عالية الأداء والصناعية.
-
بنية معدنية بالكامل – هيكل رئيسي قوي من سبائك الألمنيوم والفولاذ المقاوم للصدأ للصلابة والمتانة.
-
أجهزة وبرامج مفتوحة المصدر &و – تصميم CAD مفتوح، لوحات دوائر مطبوعة، برامج ثابتة وبرامج تحكم للتخصيص العميق.
-
دعم ROS وPython وC++ – تكامل رسمي مع ROS بالإضافة إلى واجهات برمجة التطبيقات Python/C++ لتطوير الخوارزميات بسرعة.
-
نظام بيئي غني وتوسع – يدعم الأيدي الروبوتية الماهرة، قفازات التقاط الحركة والقواعد المتنقلة لمنصات روبوتية كاملة.
المواصفات الفنية
-
درجات الحرية: 7 DOF لكل ذراع
-
مدى الذراع: 633 مم
-
الحمولة النموذجية: 4.1 كجم
-
الحمولة القصوى: 6.0 كجم لكل ذراع
-
وزن الذراع: تقريباً 5.5 كجم لكل ذراع
-
المواد: أجزاء هيكلية من سبائك الألمنيوم والفولاذ المقاوم للصدأ
-
واجهة التحكم: CAN / CAN-FD، UART (عبر محول USB2CANFD-X2 المرفق في النسخ ذات الذراعين/الأربعة)
-
تردد التحكم: حتى 1 كيلوهرتز حلقة CAN-FD
-
دعم البرمجيات: إطار عمل ROS، واجهة برمجة التطبيقات Python، واجهة برمجة التطبيقات C++
-
الهندسة البشرية: طول الذراع مناسب للمستخدمين الذين يتراوح طولهم بين 160–165 سم
البرمجيات &و نظام المصدر المفتوح
OpenArm هي منصة ذراع روبوتية مفتوحة المصدر بالكامل.الموارد الرسمية تشمل:
-
الموقع الإلكتروني: openarm.dev
-
التوثيق: docs.openarm.dev
-
GitHub: github.com/enactic/openarm
-
فيديو تعليمي: دليل رسمي على يوتيوب للبدء
مع ملفات CAD و PCB والبرامج الثابتة المفتوحة، يمكنك تعديل الميكانيكا والإلكترونيات وبرامج التحكم، أو توسيع الذراع مع مستشعرات جديدة وأدوات نهائية لمواضيع بحثك الخاصة.
سيناريوهات التطبيق النموذجية
تم تصميم OpenArm كمنصة بحث وتعليم متعددة الاستخدامات وعالية الدقة لـ:
-
دورات الروبوتات الجامعية والتجارب المخبرية
-
المعاهد البحثية ومشاريع المختبرات
-
البحث في التعلم المعزز والذكاء الاصطناعي القائم على الفيزياء
-
التفاعل بين الإنسان والروبوت ودراسات الروبوتات التعاونية
-
مساحات الصنع وفرق الأجهزة مفتوحة المصدر
-
منصات التعليم والتدريب الهندسي
بفضل حجمها المناسب للإنسان ونظام التشغيل المتوافق، فإن OpenArm مثالية للتلاعب، التشغيل عن بُعد، التعلم بالتقليد، الروبوتات المساعدة والمزيد.
إصدارات المنتج &وتكويناته
الإصدار 1 – مجموعة الأجهزة DIY
-
للمستخدمين الذين يمتلكون مهارات عملية قوية ويرغبون في فهم الهيكل الميكانيكي بعمق.
-
تشمل جميع الأجزاء الميكانيكية والكهربائية والمطبوعة بتقنية 3D؛ تقوم بتجميع المعصم ومعايرته بنفسك وفقًا للدليل.
الإصدار 2 – ذراع روبوتية جاهزة
-
للمعاهد البحثية والمختبرات والشركات والمعلمين الذين يحتاجون إلى منصة توصيل وتشغيل.
-
تم تجميعها بالكامل وضبطها ومعايرتها قبل الشحن؛ جاهزة للاستخدام مباشرة من العلبة.
تكوينات الذراع المتاحة (حسب القائمة):
-
طقم DIY – ذراع واحدة
-
ذراع جاهزة – ذراع واحدة
-
طقم DIY – ذراعين مزدوجتين
-
أذرع جاهزة – ذراعين مزدوجتين
-
طقم DIY – أربع أذرع
-
أذرع جاهزة – أربع أذرع
محتويات العبوة
كل مجموعة OpenArm أو النظام الجاهز تتضمن عادة:
-
مكونات هيكلية رئيسية من سبائك الألمنيوم والفولاذ المقاوم للصدأ
-
محركات، لوحات تحكم، مزود طاقة وكابلات
-
قطع مطبوعة بتقنية 3D ومجموعات براغي
إصدارات ذات ذراعين وذراعين رباعيين: جهاز واحد متوافق مع قائمة المواد الرسمية USB2CANFD-X2 (CEREBOTO هو الوكيل المحلي المعتمد) للتواصل بين الكمبيوتر وCAN-FD.
ملحقات الأجهزة المدعومة
يدعم OpenArm العديد من الملحقات الأجهزة (تباع بشكل منفصل)، مما يتيح لك بناء نظام روبوتي كامل:
-
يد روبوتية مرنة – للمعالجة الدقيقة وأبحاث الإمساك.
-
مجموعة قفازات التقاط الحركة – للتشغيل عن بُعد البديهي وتعلم التقليد.
-
قاعدة متحركة – لتحويل OpenArm إلى منصةManipulator متحركة.
الأسئلة الشائعة
س: هل يمكن استخدام الذراع الروبوتية على الفور؟
ج: النسخة النهائية من الذراع تم ضبطها ومعايرتها بالكامل في المصنع - فقط قم بتشغيلها وابدأ العمل. مجموعة الأجهزة DIY تتطلب منك تجميع وإعداد النظام وفقًا للتعليمات.
س: هل OpenArm متوافق مع ROS أو أي وسائط أخرى؟
ج: نعم. يدعم OpenArm رسميًا إطار عمل ROS، ويمكنك أيضًا التحكم في الذراع عبر واجهات برمجة التطبيقات Python و C++.
س: لمن هذا المنتج؟
ج: الباحثون في الجامعات والمعاهد، مختبرات الذكاء الاصطناعي والروبوتات، دورات التعليم، مراكز التدريب الهندسي، والهواة المتقدمون.
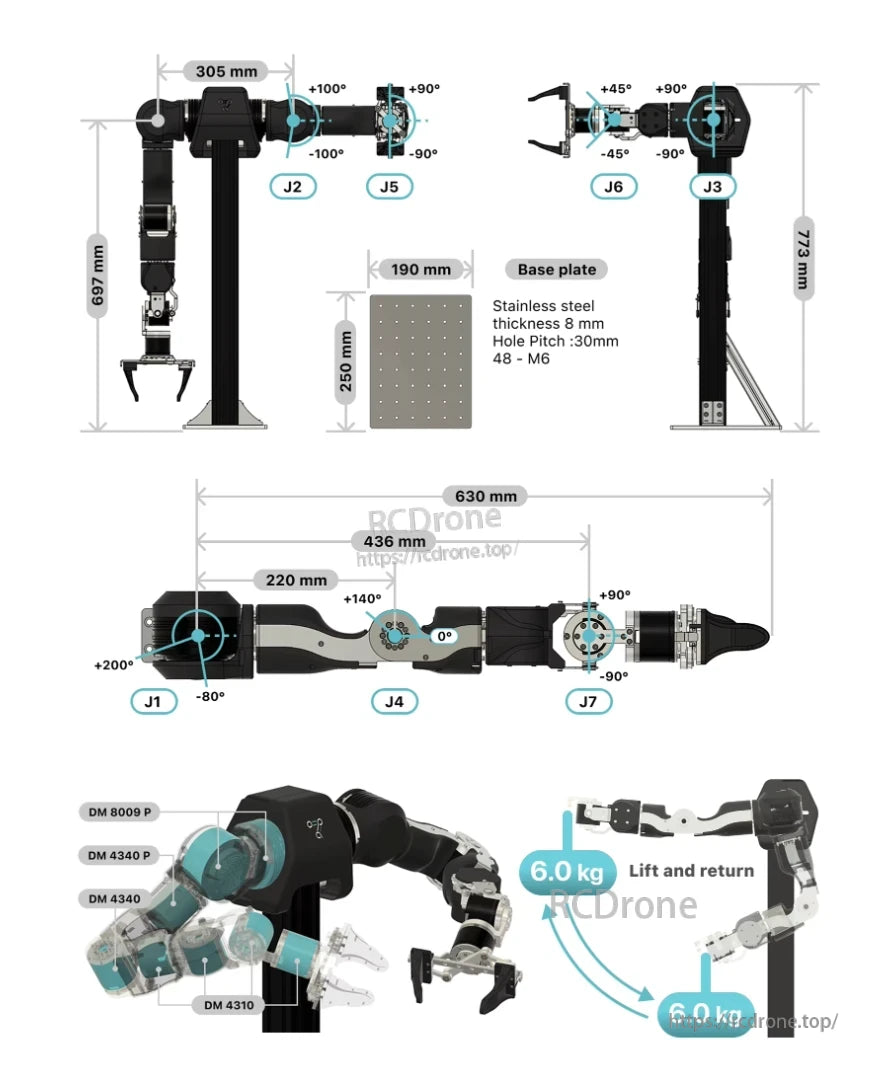
ذراع الروبوت Cereboto OpenArm 7DOF يحتوي على سبعة مفاصل (J1–J7) مع نطاقات زاوية محددة. يبلغ ارتفاعه 697 مم أو 773 مم، ويصل إلى 630 مم، ويثبت على قاعدة من الفولاذ المقاوم للصدأ بحجم 190×250 مم—بسماكة 8 مم مع 48 ثقب M6 متباعدة بمسافة 30 مم. مدعوم بمحركات DM8009P و DM4340P و DM4340 و DM4310، ويتحمل أحمالًا تصل إلى 6.0 كجم بدقة. مصمم للاستخدام الصناعي والبحثي، يوازن بين المتانة الهيكلية ودقة التحكم في الحركة.

Related Collections



