






محرك روبوتي CubeMars AK10-9 V2.0 KV60/KV100 | عزم دوران 18/15 نيوتن متر، مشفر مزدوج، أوضاع MIT وسيرفو
محرك روبوتي CubeMars AK10-9 V2.0 KV60/KV100 | عزم دوران 18/15 نيوتن متر، مشفر مزدوج، أوضاع MIT وسيرفو
CubeMars
تعذر تحميل توفر الالتقاط
نظرة عامة
يعتبر CubeMars AK10-9 V2.0 مشغل روبوتي متكامل للغاية يجمع بين محرك BLDC عالي الأداء، مخفض كوكبي، مشفّرين مزدوجين، وسائق مدمج في وحدة مدمجة واحدة. يدعم كل من وضع الطاقة MIT ووضع التحكم في السيرفو الصناعي، مما يوفر عزم دوران سلس، تحديد موقع دقيق، واستجابة سريعة، مما يجعله مثاليًا لـ الروبوتات ذات الأرجل، الهياكل الخارجية، وAGVs. متوفر في نسخ KV60 و KV100، يوفر حتى 48Nm من عزم الدوران الأقصى، مع تبديد حراري محسن ومراقبة درجة الحرارة في الوقت الحقيقي لضمان الموثوقية على المدى الطويل.
الميزات الرئيسية
-
وضعان للتحكم: يدعم التبديل السلس بين وضع الطاقة MIT ووضع التحكم في السيرفو من أجل تحكم مرن في الحركة.
-
عزم دوران عالي: يصل إلى 48Nm عزم ذروة مع تشغيل مستقر واهتزاز منخفض (0.33°).
-
تكامل عالي: يجمع بين المحرك، والمشفر، والسائق، والمخفض الكوكبي في شكل مدمج واحد.
-
المخرجات والمشفرات الداخلية: مشفرات مغناطيسية مدمجة 14 بت داخلية و15 بت خارجية تضمن تغذية راجعة دقيقة.
-
محامل أسطوانية متقاطعة: تعزز مقاومة الحمل المحوري والشعاعي، مما يحسن الاعتمادية في التطبيقات الديناميكية.
-
حساس حرارة داخلي: مراقبة درجة الحرارة في الوقت الحقيقي تمنع تلف المحرك تحت الضغط الحراري.
-
تبديد حراري محسن: تصميم هيكلي فريد يحسن إدارة الحرارة، مما يضمن تشغيل مستقر على المدى الطويل.
-
تشغيل هادئ: مستوى الضوضاء منخفض يصل إلى 65 ديسيبل عند 65 سم (نسخة KV60).
المواصفات
مواصفات AK10-9 V2.0 K60
| التطبيق | روبوت ذو أرجل، هيكل خارجي، AGV | عزم الدوران الأقصى (Nm) | 48 |
| طريقة القيادة | FOC | التيار الأقصى (ADC) | 29.8 |
| درجة حرارة التشغيل المحيطة | -20℃~50℃ | Kv (rpm/V) | 60 |
| نوع اللف | نجمي | Kt (Nm/A) | 0.198 |
| فئة العزل | C | Ke (V/krpm) | 17.2 |
| عزل عالي الجهد | 1000V 5mA/2s | مقاومة الطور إلى الطور (مΩ) | 195 |
| مقاومة العزل | 1000V 10MΩ | محاثة الطور إلى الطور (μH) | 181 |
| الطور | 3 | عطالة (gcm²) | 1002 |
| أزواج الأقطاب | 21 | Km (Nm/√W) | 0.45 |
| نسبة التخفيض | 9:1 | ثابت الزمن الميكانيكي (مللي ثانية) | 0.5 |
| عزم العودة (Nm) | 0.8 | ثابت الزمن الكهربائي (مللي ثانية) | 0.93 |
| الرجوع (°) | 0.33 | الوزن (غ) | 960 |
| حساس درجة الحرارة | NTC MF51B 103F3950 | نسبة عزم الدوران الأقصى إلى الوزن (Nm/kg) | 50 |
| الضوضاء ديسيبل 65 سم بعيدًا عن المحرك | 65 | موصل CAN | A1257WR-S-4P |
| تصنيفات الحمل الأساسية (ديناميكية C ) N | 2000 | موصل UART | A1257WR-S-3P |
| تصنيفات الحمل الأساسية (stat.C0) N | 2520 | موصل الطاقة | XT30PW-M |
| الجهد المقنن (V) | 24/48 | نوع مشفر الحلقة الداخلية | مشفر مغناطيسي |
| عزم الدوران المقنن (Nm) | 18 | دقة مشفر الحلقة الداخلية | 14بت |
| السرعة المقننة (rpm) | 109/228 | نوع مشفر الحلقة الخارجية | مشفر مغناطيسي |
| التيار المقنن (ADC) | 10.6 | دقة مشفر الحلقة الخارجية | 15بت |
AK10-9 V2.0 KV100 المواصفات
| التطبيق | روبوت ذو أرجل، هيكل خارجي، AGV | عزم الدوران الأقصى (Nm) | 38 |
| طريقة القيادة | FOC | التيار الأقصى (ADC) | 41.2 |
| درجة حرارة التشغيل المحيطة | -20℃~50℃ | Kv (rpm/V) | 100 |
| نوع اللف | دلتا | Kt (Nm/A) | 0.114 |
| فئة العزل | C | Ke (V/krpm) | 9.9 |
| عزل عالي الجهد | 1000V 5mA/2s | مقاومة الطور إلى الطور (mΩ) | 65.5 |
| مقاومة العزل | 1000V10MΩ | الحث بين الطورين (μH) | 60 |
| الطور | 3 | العطالة (gcm²) | 1002 |
| أزواج الأقطاب | 21 | Km (Nm/√W) | 0.45 |
| نسبة التخفيض | 9:1 | ثابت الزمن الميكانيكي (ms) | 0.51 |
| عزم الدوران العكسي (Nm) | 0.8 | ثابت الزمن الكهربائي (ms) | 0.92 |
| الرجوع (°) | 0.33 | الوزن (غ) | 960 |
| حساس الحرارة | NTC MF51B 103F3950 | نسبة الوزن إلى العزم الأقصى (Nm/kg) | 39.6 |
| ضوضاء ديسيبل 65 سم بعيدًا عن المحرك | 70 | موصل CAN | A1257WR-S-4P |
| تصنيفات الحمل الأساسية (ديناميكية C) N | 2000 | موصل UART | A1257WR-S-3P |
| تصنيفات الحمل الأساسية (stat.C0) N | 2520 | موصل الطاقة | XT30PW-M |
| جهد التشغيل (فولت) | 24/48 | نوع مشفر الحلقة الداخلية | مشفر مغناطيسي |
| عزم الدوران المقدر (نيوتن متر) | 15 | دقة مشفر الحلقة الداخلية | 14 بت |
| السرعة المقدرة (دورة في الدقيقة) | 205/421 | نوع مشفر الحلقة الخارجية | مشفر مغناطيسي |
| التيار المقدر (أمبير مستمر) | 16.2 | دقة مشفر الحلقة الخارجية | 15 بت |
| عدد المشفرات | 2 |
التطبيقات
-
روبوتات ذات أرجل بيونية
-
الهياكل الخارجية لإعادة التأهيل أو تحمل الأحمال
-
المركبات الأرضية المستقلة (AGV)
-
أنظمة التحكم في عزم الدوران المشترك
-
الروبوتات الشبيهة بالبشر والرباعية الأرجل
التنزيلات
![]() دليل السائق والتحكم لسلسلة AK v1.0.15.X.pdf
دليل السائق والتحكم لسلسلة AK v1.0.15.X.pdf
التفاصيل
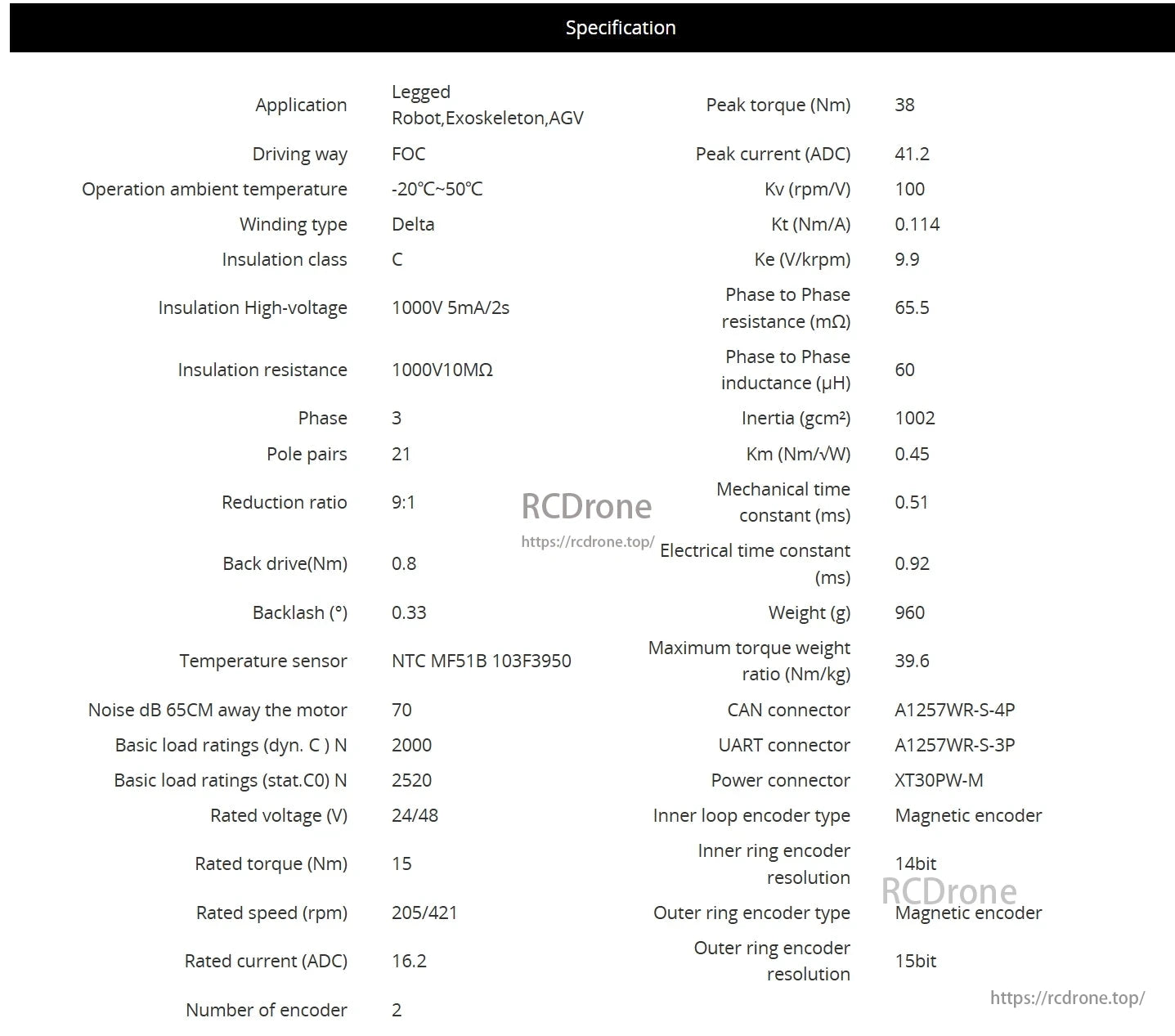
محرك CubeMars AK10 الروبوتي: عزم دوران ذروة 38 نيوتن متر، 41.2 تيار ذروة ADC، -20 درجة مئوية إلى 50 درجة مئوية تشغيل، نسبة تقليل 9:1، وزن 960 جرام، نسبة عزم الدوران إلى الوزن القصوى 39.6 Nm/kg، ضوضاء 70 ديسيبل، مشفرات مغناطيسية، موصلات CAN و UART.

محرك CubeMars AK10 الروبوتي: عزم دوران ذروة 48 Nm، تيار ذروة 29.8 A، -20 درجة مئوية إلى 50 درجة مئوية تشغيل، عزل 1000V، 3 مراحل، 21 زوج من الأقطاب، نسبة تقليل 9:1، وزن 960 جرام، نسبة عزم الدوران إلى الوزن القصوى 50 Nm/kg، مشفرات مغناطيسية.

مخطط التحليل لمحرك CubeMars AK10-9 V2.0 KV60@48VDC actu. يعرض القدرة الناتجة (W)، الكفاءة، التيار (A)، والسرعة (RPM) مقابل العزم (N.m). تصل الكفاءة إلى ذروتها حوالي 12 N.m، بينما تزداد القدرة الناتجة بشكل ثابت مع العزم. يرتفع التيار بشكل خطي، وتنخفض السرعة مع زيادة العزم. يبرز المخطط خصائص أداء المحرك، مما يوضح قدرته تحت أحمال متغيرة.تشمل المقاييس الرئيسية الحد الأقصى للطاقة الناتجة التي تتجاوز 800 واط وسرعة التشغيل تصل إلى 350 دورة في الدقيقة عند عزم دوران منخفض. تساعد هذه البيانات في فهم كفاءة المحرك الديناميكية للطاقة عبر تطبيقات مختلفة.
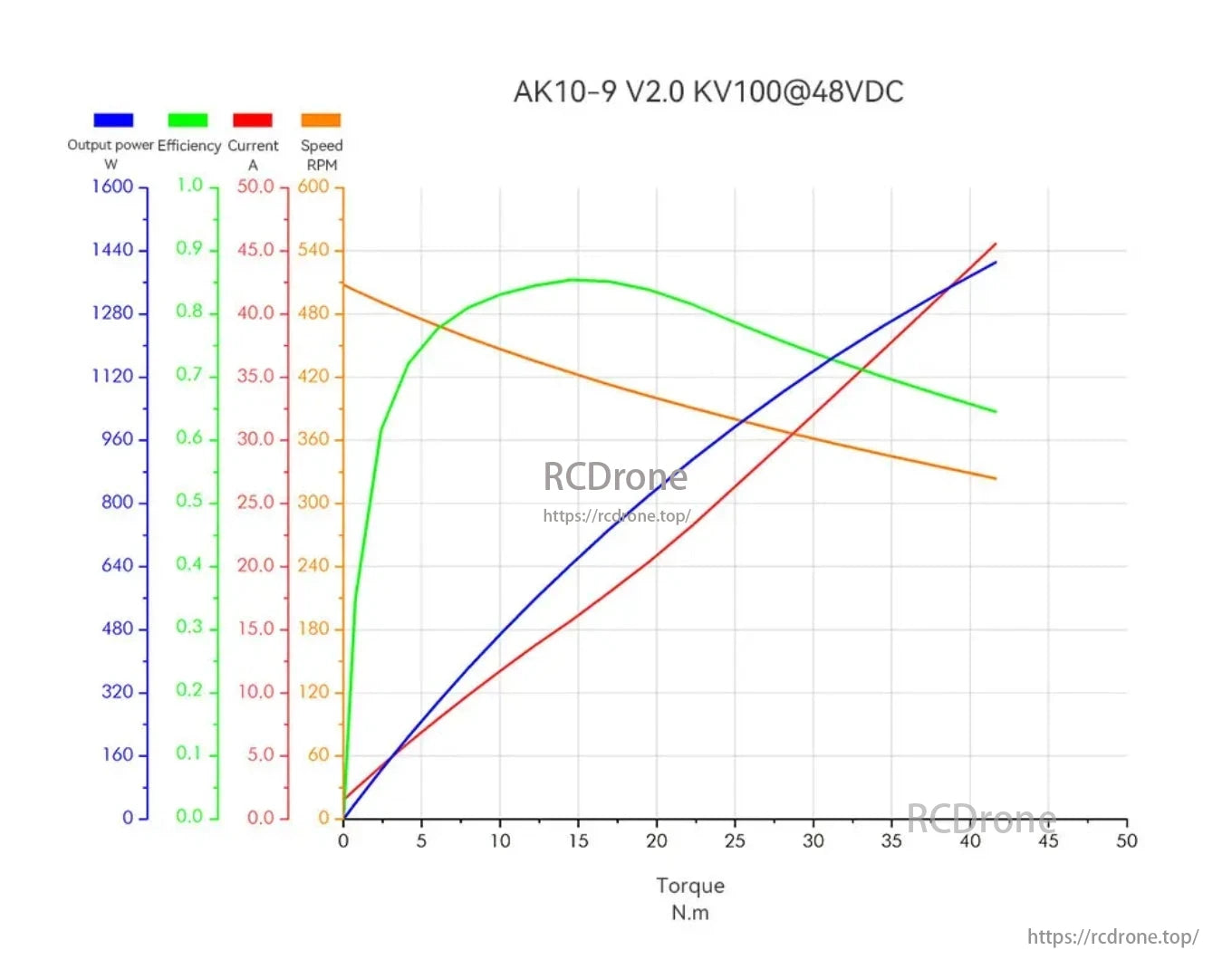
أداء CubeMars AK10-9 V2.0 KV100@48VDC actuيتم تصويره. يتم رسم الطاقة الناتجة (واط)، الكفاءة، التيار (أمبير)، والسرعة (دورة في الدقيقة) مقابل عزم الدوران (N.m). تصل الكفاءة إلى ذروتها حوالي 15 N.m، بينما تزداد الطاقة الناتجة بشكل خطي مع عزم الدوران. كما يرتفع التيار بشكل ثابت مع عزم الدوران. تنخفض السرعة مع زيادة عزم الدوران، بدءًا من حوالي 480 دورة في الدقيقة عند عزم دوران صفر. توضح الرسم البياني نقاط التشغيل المثلى لمختلف التطبيقات، مما يبرز قدرات المحرك تحت ظروف تحميل مختلفة. تساعد هذه البيانات في اختيار الإعدادات المناسبة للمهام المحددة.

محرك CubeMars AK10-9 KV60 المتكامل، تشمل الأوضاع. محرك روبوتي مع FCC، CE، RoHS V2.0 شهادة.

يقدم المشغل الروبوتي تحكمًا فعالًا في المحرك، ووضع طاقة دقيق، واستجابة أسرع للتطبيقات الصناعية.

يتضمن المشغل الروبوتي CubeMars AK10 محرك BLDC عالي الأداء، ومحمل أسطواني متقاطع من الدرجة الصناعية، ومستشعر حرارة، ومشفر إخراج، ووضع تحكم مزدوج، ومخفض كوكبي لعزم دوران مستقر.

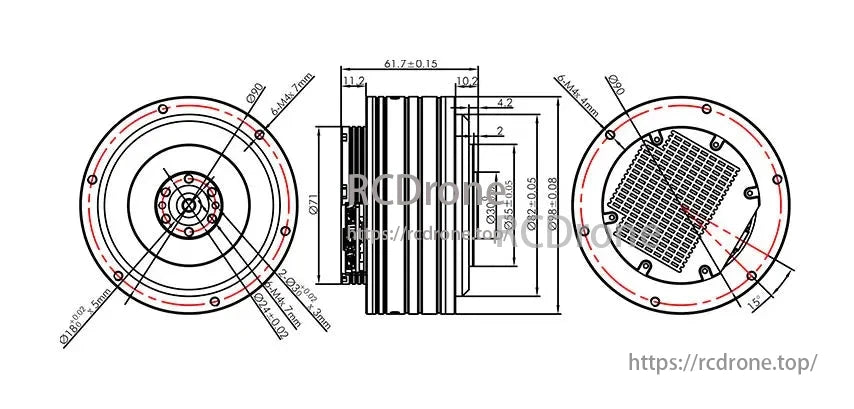
قم بتحسين الهيكل وإشعاع الحرارة بسرعة. عزز تبديد حرارة غلاف المحرك لطول العمر واستقرار أداء وحدة القيادة. الرقم التسلسلي: 1010921081.
Related Collections






