




محرك روبوت DAMIAO DM-J4310-2EC، جهد 24 فولت، عزم اسمي 3 نيوتن.متر، عزم أقصى 7 نيوتن.متر، 120 دورة/دقيقة، CAN بسرعة 1 ميجابت/ث، UART بسرعة 921600 بت/ث.
محرك روبوت DAMIAO DM-J4310-2EC، جهد 24 فولت، عزم اسمي 3 نيوتن.متر، عزم أقصى 7 نيوتن.متر، 120 دورة/دقيقة، CAN بسرعة 1 ميجابت/ث، UART بسرعة 921600 بت/ث.
DAMIAO
سعر عادي
$124.99 USD
سعر عادي
سعر البيع
$124.99 USD
سعر الوحدة
per
Taxes included.
الشحن محسوب عند السداد.
تعذر تحميل توفر الالتقاط
نظرة عامة
محرك الروبوت DAMIAO DM-J4310-2EC هو محرك مدمج مع تروس مدمجة ومشفرات مغناطيسية مزدوجة للتحكم الدقيق في الحركة. يعمل بجهد 24 فولت ويوفر عزم دوران اسمي قدره 3 نيوتن متر، وعزم دوران ذروة قدره 7 نيوتن متر، وسرعة اسمية قدرها 120 دورة في الدقيقة عبر مرحلة تقليل 10:1. يتم دعم التحكم والتكوين عبر CAN@1Mbps و UART@921600bps.
الميزات الرئيسية
- تشغيل بجهد 24 فولت مع تيار اسمي 2.5A و تيار ذروة 7.5A
- تقليل 10:1 لإنتاج عزم دوران عالي: 3 نيوتن متر اسمي، 7 نيوتن متر ذروة
- مشفرات مغناطيسية مزدوجة بدقة 14 بت
- حجم مدمج ووزن خفيف: قطر خارجي 57 مم، ارتفاع 46 مم، وزن 300 جرام
- واجهة تحكم CAN@1Mbps؛ تكوين UART@921600bps
المواصفات
| المعلمة | القيمة |
|---|---|
| النموذج | DM-J4310-2EC |
| الجهد الاسمي | 24 فولت |
| التيار الاسمي | 2.html 5A |
| التيار الذروي | 7.5A |
| عزم الدوران الاسمي | 3 N.M |
| عزم الدوران الذروي | 7 N.M |
| السرعة الاسمية | 120 RPM |
| الحد الأقصى. | html|
| سرعة بدون تحميل | 200 دورة في الدقيقة |
| نسبة التخفيض | 10:1 |
| أزواج الأقطاب | 14 |
| محاثة الطور | 340uH |
| مقاومة الطور | 650 مللي أوم |
| القطر الخارجي | 57مم |
| الارتفاع | 46مم |
| وزن المحرك | 300غ |
| دقة المشفر | 14بت |
| عدد المشفرات | 2 |
| نوع المشفر | مشفر مغناطيسي بدورة واحدة |
| واجهة التحكم | CAN@1Mbps |
| واجهة التكوين | UART@921600bps |
أبعاد المحرك
- القطر الخارجي: 57مم
- الارتفاع الكلي: 46مم؛ طول الجسم: 45مم
- دائرة براغي الوجه الأمامي: 6 x M3، عمق الثقب 5؛ قطر الدائرة 50مم
- دائرة براغي الوجه الخلفي: 4 x M3، عمق الثقب 4؛ قطر الدائرة 38مم
- الدائرة الداخلية: 24. html 30mm
- ثلاثة ثقوب: 4mm (+0.04 / +0.02)
- ثقبين: 3mm (+0.04 / +0.02)، العمق 5
- زاوية الميزة: 15°
التطبيقات
- الروبوتات البشرية
- الأذرع الروبوتية
- الهياكل الخارجية
- الروبوتات رباعية الأرجل
- مركبات AGV
- روبوتات ARU
تكامل المصدر المفتوح
OpenArm هو ذراع روبوت بشري مفتوح المصدر بالكامل مصمم لأبحاث الذكاء الاصطناعي الفيزيائي ونشره في البيئات الغنية بالاتصال.
الكتيبات
- DAMIAO_DM_J4310_2EC_V1.1_Motor.stp
- DM-J4310-2EC_Gear_Motor_Instructions.pdf
- DM_J4310_V1.1_instalation_drawing.pdf
التفاصيل

رسم فني لمحرك الروبوت مع الأبعاد والمواصفات
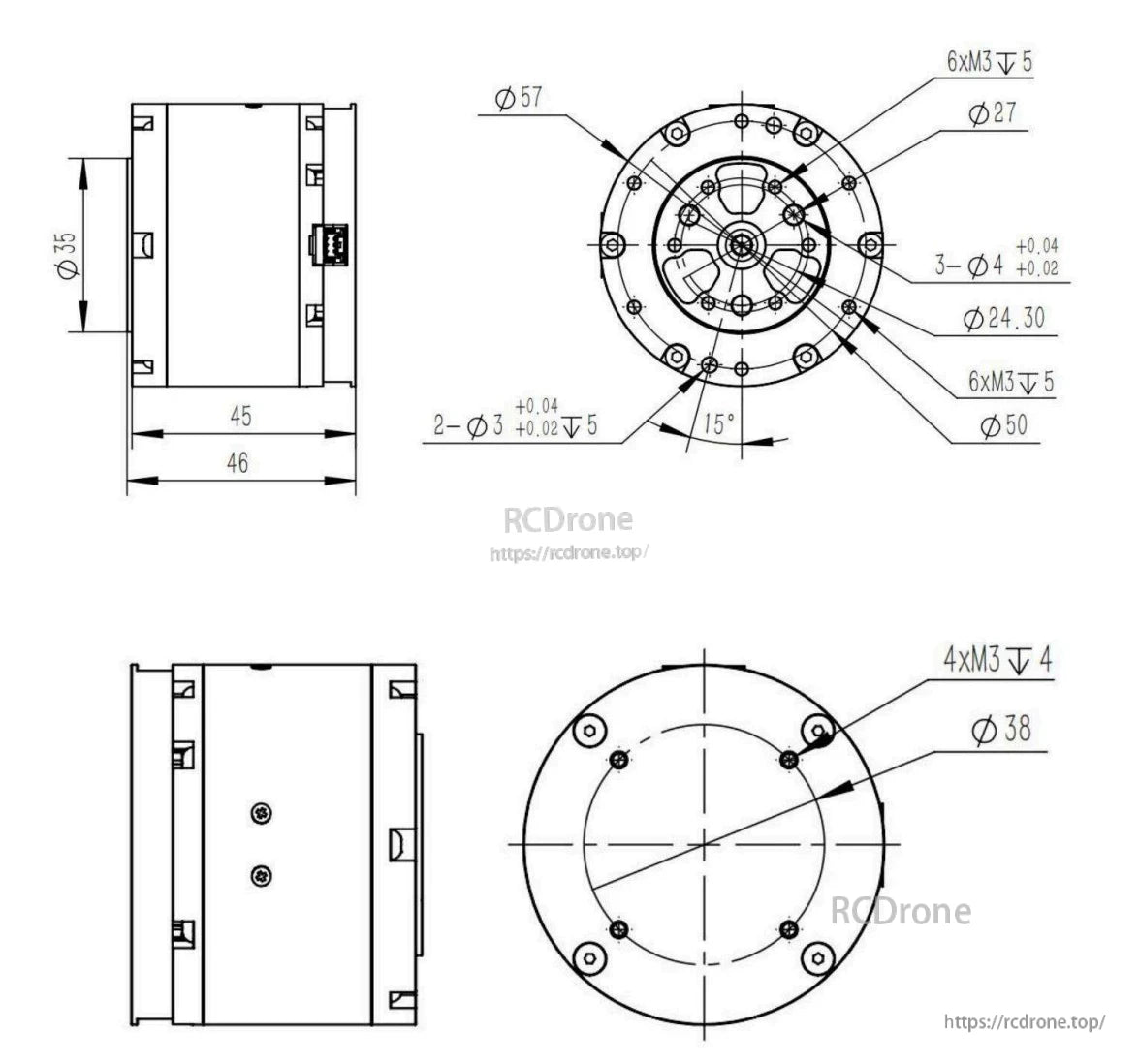
مواصفات محرك الروبوت DAMIAO DM-J4310-2EC، الأبعاد، والرسومات الميكانيكية مشمولة.
Related Collections




