




وحدة DFRobot SEN0142 MPU6050 جيروسكوب ومقياس تسارع 6 محاور IMU مع معالج حركة رقمي I2C لأردوينو & الروبوتات
وحدة DFRobot SEN0142 MPU6050 جيروسكوب ومقياس تسارع 6 محاور IMU مع معالج حركة رقمي I2C لأردوينو & الروبوتات
DFRobot
تعذر تحميل توفر الالتقاط
نظرة عامة
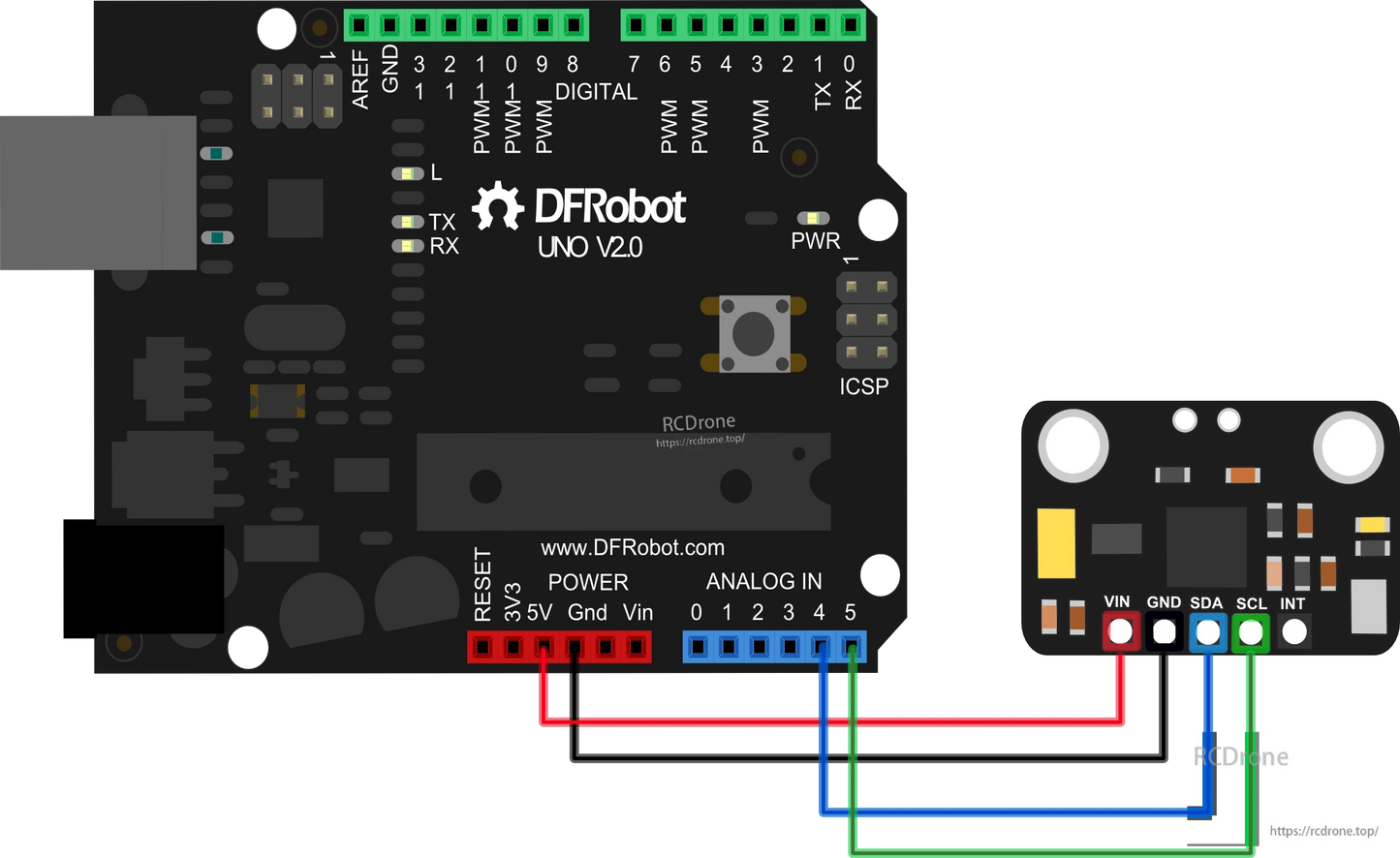
تجمع وحدة DFRobot SEN0142 MPU6050 6 DOF IMU بين جيروسكوب ثلاثي المحاور ومسرع ثلاثي المحاور على شريحة واحدة، مما يوفر استشعار حركة دقيق للروبوتات والطائرات بدون طيار والأجهزة القابلة للارتداء ومشاريع Arduino. تتميز بمعالج الحركة الرقمي (DMP)، حيث تدعم خوارزميات دمج الحركة ثلاثية الأبعاد والتسعة أبعاد، مما يمكّن من إخراج بيانات الكواتيرنيون وزوايا أويلر وبيانات المستشعر الخام. مع نطاق جهد إدخال واسع يتراوح بين 3V–5V، يمكن توصيل MPU6050 مباشرة بـ Arduino وغيرها من المتحكمات الدقيقة لتتبع الحركة في الوقت الحقيقي واكتشاف الإيماءات.
الميزات الرئيسية
-
يجمع بين جيروسكوب ثلاثي المحاور و مسرع ثلاثي المحاور في شريحة واحدة
-
نطاق المسرع القابل للبرمجة: ±2g، ±4g، ±8g، ±16g
-
حساسية الجيروسكوب: ±250، ±500، ±1000، ±2000 dps
-
معالج الحركة الرقمي (DMP) لدمج الحركة والتعرف على الإيماءات
-
واجهة رقمية I2C تدعم تنسيقات المصفوفة، الكواتيرنيون، أويلر، والبيانات الخام
-
معايرة الانحياز &و البوصلة لتحسين الدقة
-
متوافق مع أردوينو والإلكترونيات القابلة للارتداء عبر I2Cdevlib
المواصفات
-
جهد التشغيل: 3–5 فولت
الإخراج: بيانات I2C الرقمية (6/9-محور MotionFusion)
-
مستشعر التسارع: نطاق قابل للبرمجة ±2g / ±4g / ±8g / ±16g
-
مقياس الزاوية: حساسية ±250 / ±500 / ±1000 / ±2000 dps
-
تنسيق البيانات: مصفوفة الدوران، كواتيرنيون، زاوية أويلر، بيانات خام
-
الأبعاد: 14 × 21 مم
التطبيقات
-
استشعار حركة الروبوتات
-
مشاريع إلكترونيات Arduino &و DIY
-
التفاعل بين الإنسان والحاسوب (HCI)
-
الأجهزة القابلة للارتداء والتحكم بالإيماءات
-
أنظمة الملاحة والتوازن (e.g., وسائل النقل من نوع سيغواي)
-
تثبيت الطائرات بدون طيار وتتبع الحركة
التفاصيل



كود عينة
يرجى تحميل المكتبات لكل مستشعرات IMU أولاً!




- Choosing a selection results in a full page refresh.
- Opens in a new window.