F450-4B مجموعة تطوير الطائرات بدون طيار Raspberry Pi القابلة للبرمجة - Pixhawk DIY Ardupilot منصات الطائرات بدون طيار الصناعية مفتوحة المصدر
F450-4B مجموعة تطوير الطائرات بدون طيار Raspberry Pi القابلة للبرمجة - Pixhawk DIY Ardupilot منصات الطائرات بدون طيار الصناعية مفتوحة المصدر
RCDrone
تعذر تحميل توفر الالتقاط
ملخص
ال إف450-4بي طائرة راسبيري باي بدون طيار هو متقدم طقم طائرة بدون طيار DIY الذي يجمع بين القوة راسبيري باي 4B كمبيوتر على متن الطائرة متعدد الاستخدامات وحدة تحكم الطيران Pixhawk 2.4.8، مما يجعلها قابلة للتخصيص بدرجة كبيرة طائرة بدون طيار قابلة للبرمجة المنصة. هذه منصة طائرات بدون طيار مفتوحة المصدر يدعم الأدوات المتطورة مثل درونكيت-بايثون، مما يتيح للمطورين إنشاء مهام مستقلة ونقل البيانات في الوقت الفعلي وتطبيقات معالجة الصور المدعومة بالذكاء الاصطناعي. مع إطار قوي مقاس 450 مم وكاميرا عالية الدقة بدقة 200 ميجابكسل وبطارية 3S 5200 مللي أمبير في الساعة لمدة تصل إلى 20 دقيقة من الطيران وأوضاع طيران متقدمة مثل تثبيت الارتفاع والعودة إلى المنزل ووضع الدائرة، تعد مجموعة الطائرات بدون طيار F450 الخيار المثالي للمتحمسين والباحثين والمعلمين الذين يسعون إلى تجربة تطوير طائرات بدون طيار مبتكرة.
الميزات الرئيسية
أجهزة عالية الأداء
- راسبيري باي 4B:يعمل بمعالج رباعي النواة بسرعة 1.5 جيجاهرتز 64 بت، ويدعم إخراج فيديو 4K واتصال WiFi عالي السرعة للتشغيل الموثوق به.
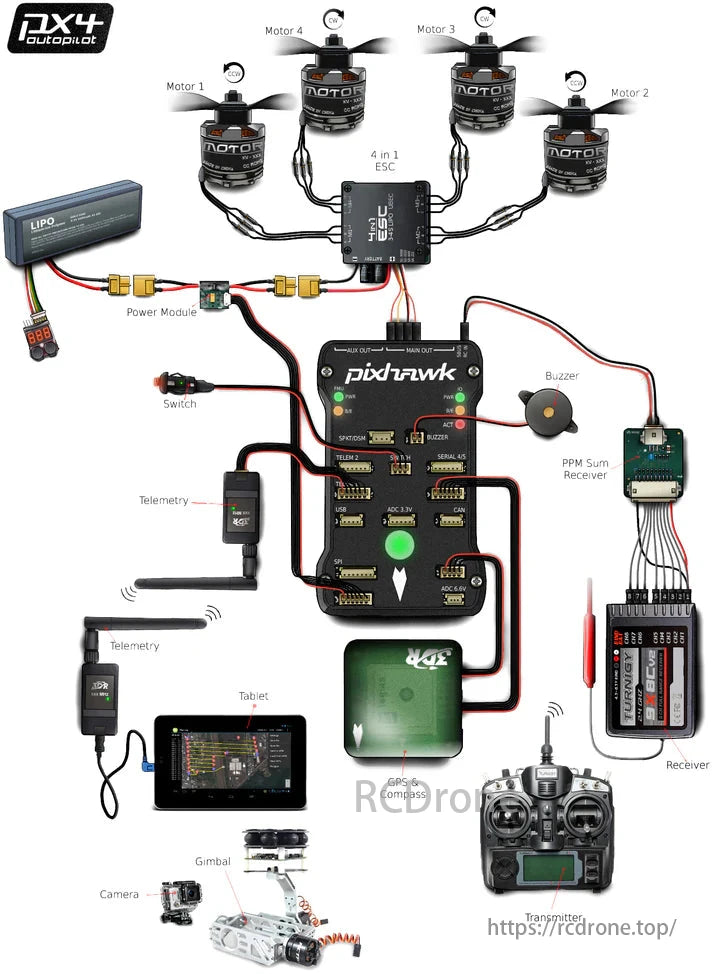
- وحدة التحكم في الطيران Pixhawk 2.4.8:مزودة بأجهزة استشعار متكاملة متعددة، مما يضمن التحكم الدقيق في الموقف، والتحليق، وتخطيط المهمة.
- دعم توسيع الرؤية:بفضل الكاميرا أحادية العين وأدوات OpenCV، تلبي هذه المجموعة احتياجات نقل الصور ومعالجتها في الوقت الفعلي.
أوضاع طيران متنوعة
- تثبيت الارتفاع (AltHold):يحافظ على ارتفاع طيران ثابت.
- تحوم:يوفر تحليقًا ثابتًا دقيقًا.
- العودة إلى الصفحة الرئيسية (العودة):العودة تلقائيًا إلى نقطة البداية في حالة فقدان الإشارة أو انخفاض مستوى البطارية.
- الهبوط (الأرض):ينفذ هبوطًا ذاتيًا سلسًا.
- وضع التثبيت:يضبط موقف الطيران تلقائيًا.
- وضع الدائرة:يقوم برحلات دائرية حول الهدف.
- الوضع بدون رأس:إزالة القيود الاتجاهية لتسهيل التحكم.
- العودة خارج السيطرة:العودة إلى موقع محدد مسبقًا عند فقدان الإشارة.
- هبوط منخفض الطاقة:يهبط بأمان في حالة انخفاض مستوى البطارية.
نقل البيانات ومعالجة الصور
- إنشاء شبكة WiFi محلية من خلال نقطة اتصال مدمجة دون الحاجة إلى أجهزة توجيه خارجية، مما يتيح نقل البيانات والصور في الوقت الفعلي.
- يدعم بث الفيديو وتحليله استنادًا إلى OpenCV، وهو مثالي لمراقبة الصور والتطبيقات الذكية.
تحديد
معلمات الطائرة بدون طيار
| المعلمة | تفاصيل |
|---|---|
| اسم | طقم طائرة بدون طيار F450 |
| قاعدة العجلات | 450 ملم |
| وزن | 1493 جرامًا (مع البطارية و Raspberry Pi 4B) |
| جهاز التحكم في الطيران | بيكس هوك 2.4.8 وحدة تحكم طيران مفتوحة المصدر |
| كمبيوتر على متن الطائرة | راسبيري باي 4B |
| آلة تصوير | 200 ميجا بكسل عالية الدقة 1080 بكسل |
| دعم التحويم | وحدة التدفق البصري ومستشعر المسافة بالليزر |
| وحدة نظام تحديد المواقع العالمي (GPS) | نظام تحديد المواقع العالمي (جي بي إس) m8n |
| وقت الرحلة | ~20 دقيقة (حسب البيئة والمهمة) |
| بطارية | 3S 5200 مللي أمبير (11.1 فولت) |
| سعة الحمولة | 500 جرام |
| مقاومة الرياح | المستوى 3-4 |
| المحرك | ساني سكاي A2212 |
| خروج | Hobbywing 20A ESC (يدعم بطاريات LiPo 3S-4S) |
| المراوح | مراوح T1045 ذاتية القفل |
| أقصى ارتفاع | 2000 متر (بدون تدخل) |
| مدى الطيران | 1000 متر |
| سيناريوهات الطيران | داخلي / خارجي |
مواصفات وحدة التحكم في الطيران Pixhawk 2.4.8
- المعالج:32 بت ARM STM32F427 Cortex M4، 168 ميجا هرتز، 256 كيلو بايت ذاكرة وصول عشوائي
- أجهزة الاستشعار:
- جيروسكوب L3GD20 ثلاثي المحاور 6DOF
- LSM303D مقياس تسارع/مغناطيسية ثلاثي المحاور 14 بت
- مقياس التسارع/المغناطيسية MPU6000 بستة محاور
- مقياس الضغط الجوي عالي الدقة MS5611
- التوافق مع التحكم الأرضي:QGroundControl، MissionPlanner
- أبعاد: 81 مم × 47 مم × 16 مم؛ الوزن: 37 جرامًا
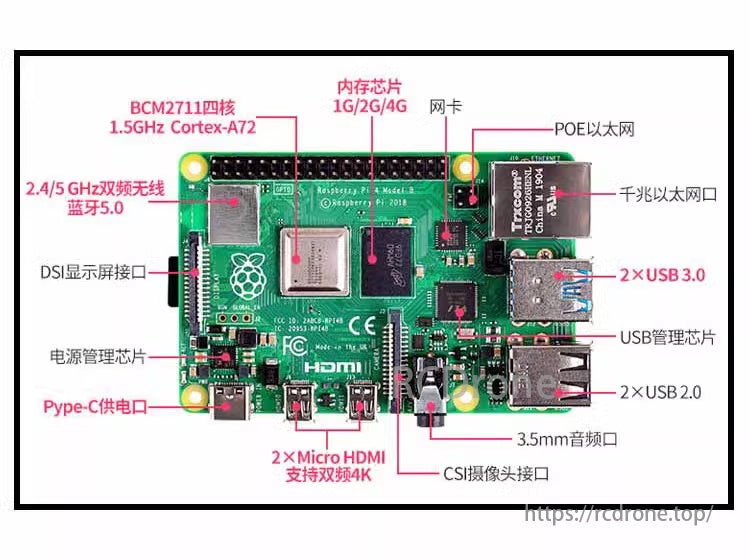
مواصفات Raspberry Pi 4B
- مجموعة الشرائح:برودكوم BCM2711
- وحدة المعالجة المركزية: 64 بت 1.5 جيجا هرتز رباعي النواة
- وحدة معالجة الرسوميات: 500 ميجا هرتز فيديو كور السادس
- كبش:4 جيجا بايت DDR4
- الواجهات: 2 × USB 3.0، 2 × USB 2.0
- مخرج الفيديو: منفذي HDMI صغيرين، يدعمان 4K@60Hz
- تواصل:بلوتوث 5.0، واي فاي 5 (2.4/5 جيجاهرتز)
- مزود الطاقة:USB Type-C (5 فولت 3 أمبير)
تتضمن الحزمة
التكوين 1: محرك SunnySky A2212 مع جهاز التحكم عن بعد FlySky i6 وتقنية القياس عن بعد
- إطار F450 مع معدات الهبوط
- محركات SunnySky A2212 (4 قطع)
- وحدات التحكم الإلكترونية Hobbywing 20A (4 قطع)
- مراوح T1045 ذاتية القفل (4 أزواج)
- وحدة GPS PIX M8n
- لوحة امتصاص الاهتزازات
- جهاز التحكم عن بعد FlySky i6
- بطارية 3S 5200 مللي أمبير
- شاحن التوازن B3
- حامل GPS
- وحدة قياس الجهد FS

متضمن: أحزمة البطارية، أربطة الكابلات المصنوعة من النايلون، وسادات خشبية، شريط لاصق 3M، جرس، أدوات التثبيت
تتوفر مقاطع فيديو للتجميع وتصحيح الأخطاء، والمواد ذات الصلة؛ اتصل بخدمة العملاء للحصول على كود المصدر.
التكوين 2: محرك SunnySky A2212 مع Radiolink PRO
- إطار F450 مع معدات الهبوط
- محركات SunnySky A2212 (4 قطع)
- وحدات التحكم الإلكترونية Hobbywing 20A (4 قطع)
- 9450 مراوح ذاتية القفل (3 أزواج)
- صورة.مجموعة وحدة GPS M8n
- لوحة امتصاص الاهتزازات
- راديولينك برو (جهاز استقبال R9DS)
- بطارية تحكم 3S 2200mAh
- بطارية 3S 5200 مللي أمبير
- شاحن التوازن B3
- حامل GPS

متضمن: أحزمة البطارية، أربطة الكابلات المصنوعة من النايلون، وسادات خشبية، شريط لاصق 3M، جرس، أدوات التثبيت
تتوفر مقاطع فيديو للتجميع وتصحيح الأخطاء، والمواد ذات الصلة؛ اتصل بخدمة العملاء للحصول على كود المصدر.
مجموعة تجميع طائرة بدون طيار F450
سيناريوهات التطبيق
مجموعة تطوير الطائرة بدون طيار F450-4B مثالية لـ:
- البحث والتطوير للطائرات بدون طيار:البحث الجامعي، اختبار وحدة تحكم الطيران، تطوير الخوارزميات.
- التطبيقات الذكية:تخطيط المسار، والتعرف على الهدف، وتجنب العوائق.
- تجارب تعليمية:البرمجة وتجميع الأجهزة واستكشاف الأخطاء وإصلاحها.
- الاستخدام الميداني:التحليق الداخلي، والمسح الخارجي، والمراقبة الزراعية، والمزيد.
تفاصيل
منصة تطوير طائرات بدون طيار Raspberry Pi F450-4B
F450 هو نموذج طائرة بدون طيار كلاسيكي ومستخدم على نطاق واسع، حيث يوفر تجميعًا بسيطًا ومريحًا وأداءً عالي التكلفة وعملية قوية وملاءمة للمبتدئين للبدء بسرعة في عمليات الطائرات بدون طيار.

تم ترقية Raspberry Pi 4B
إن قوة معالجة الأجهزة Raspberry Pi 4B أقوى بكثير من 3B+.
تم تجهيز Raspberry Pi بأحدث نظام مفتوح المصدر أوبونتو 20.04، مما يوفر تجربة أكثر سلاسة مقارنة بنظام Ubuntu Mate.

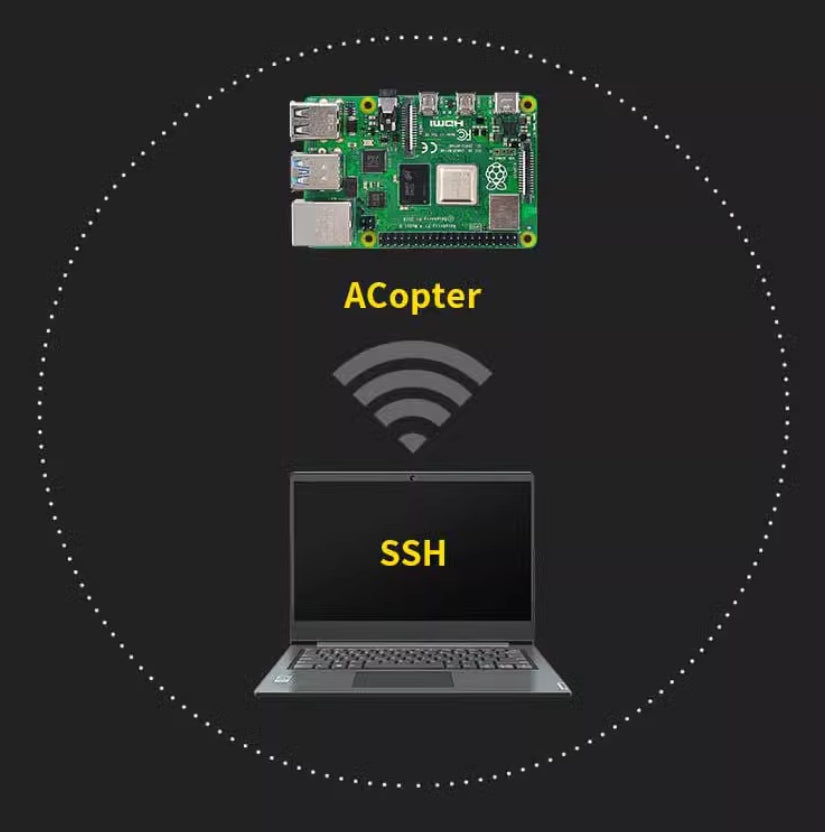
نقطة اتصال واي فاي ممكّنة للنظام (Acopter)
باستخدام إمكانية WiFi في Raspberry Pi 4B، يتم إنشاء نقطة اتصال ذاتية البناء (Acopter). يمكن للكمبيوتر الشخصي الاتصال مباشرة بنقطة اتصال WiFi في Raspberry Pi 4B لتشكيل شبكة محلية واستخدام أوامر SSH للوصول عن بُعد إلى Raspberry Pi. على عكس طراز 3B+ الذي يتطلب جهاز توجيه لتكوين الشبكة، فإن هذا الإعداد أبسط كثيرًا وأكثر سهولة في الاستخدام للمبتدئين.
معالجة بصرية OpenCV
تمت إضافة كاميرا أحادية العدسة، مما يتيح نقل الصور ومعالجتها لاحقًا. يمكن التقاط تدفقات الفيديو عبر Raspberry Pi ومعالجتها باستخدام أدوات مثل OpenCV. يمكن أيضًا إرسال تدفقات الفيديو عالية الدقة في الوقت الفعلي مرة أخرى إلى جهاز كمبيوتر شخصي للمعالجة أو إلى جهاز محمول للعرض.

واجهة توسعة إضافية
يوفر Raspberry Pi 4B مجموعة واسعة من واجهات التوسعة، بما في ذلك منفذي USB 3.0 المزدوجين، ومنافذ HDMI الصغيرة بدقة 4K، وواجهات CSI وDSI، وGigabit Ethernet، ومصدر طاقة من النوع C، مما يوفر تنوعًا استثنائيًا لمختلف التطبيقات.
إصدار الكاميرا الفردية
يتضمن إصدار الكاميرا الفردية Raspberry Pi 4B وكاميرا أحادية العين، مما يتيح الاتصال عبر منفذ تسلسلي مع وحدة التحكم في الطيران. وهو يدعم مهام مثل المعالجة المرئية وبرمجة Python والاتصال. هذا الإصدار مناسب للمستخدمين الذين لديهم خبرة سابقة في استخدام Pixhawk، ومعرفة أساسية بنظام التشغيل Ubuntu (Linux)، وOpenCV، وRaspberry Pi، والاتصال بشبكة المنطقة المحلية.
بالإضافة إلى الميزات الأساسية، يدعم إصدار الكاميرا الفردية نقل الصور والبيانات عبر شبكة WiFi ويسمح بالتحكم في الطائرة بدون طيار من خلال درونكيت-بايثون برمجة.

تحديد موقع التدفق البصري
التحكم في التحليق الداخلي باستخدام Dronekit-python في ظل ظروف تحديد المواقع بالتدفق البصري

تدعم منصة تطوير الطائرات بدون طيار هذه روس, برمجة بايثون, التعرف على الصور باستخدام OpenCV, نقل 4G لمسافات طويلة، و نظام الهبوط الموجه بصريًا باستخدام كود Aruco ثنائي الأبعاد، مما يجعلها متعددة الاستخدامات ومبتكرة للغاية.

جهاز التحكم عن بعد FlySky i6
مجهز بجهاز استقبال ia6b محمل مسبقًا ببرامج ثابتة مكونة من 10 قنوات، ووحدة قياس عن بعد للجهد، ونطاق تحكم عن بعد يزيد عن 1000 متر، مثالي للمبتدئين للتعلم والممارسة.

جهاز التحكم عن بعد Radiolink AT9S
يتميز بـ 10 قنوات مع نطاق تحكم يزيد عن 2000 متر. مزود بوحدة قياس عن بعد توفر بيانات حول جهد البطارية وعدد أقمار GPS وارتفاع الرحلة والإحداثيات ووضع الطيران والمزيد.

التعليمات
1. هل يمكنني إجراء تطوير ثانوي؟ هل يمكنني البرمجة بشكل مستقل؟
الإجابة هي نعم. كما ذكرنا سابقًا، يعد Ardupilot حاليًا نظام التحكم في الطيران مفتوح المصدر الأكثر استخدامًا على نطاق واسع، ويتم تطوير العديد من نماذج الطائرات بدون طيار المحلية والدولية الممتازة بناءً على هذا النظام.
يتضمن التطوير الثانوي بشكل أساسي اتجاهين: تطوير التحكم في الطيران والتوسع الخارجي.
- تطوير التحكم في الطيران
نحن نستخدم Ardupilot، لذا فإن تعلم تطوير التحكم في الطيران مفتوح المصدر يتضمن في المقام الأول دراسة مشروع Ardupilot مفتوح المصدر.
- تتطلب مهارات البرمجة القوية (يكون الكود المصدر بلغة C++)، بالإضافة إلى معرفة الرياضيات المتقدمة (الرياضيات المنفصلة، التكرار، الخطية)، تصفية كالمان، والتطوير المضمن.
- إن الأساس النظري المتين مطلوب. وهذا يؤهلك للعمل في تطوير الأنظمة غير المأهولة والبحث والتطوير في مجال التحكم في الطيران.
إذا كنت تريد التركيز على تطوير التحكم في الطيران، فيجب إنجاز معظم العمل على جهاز الكمبيوتر الخاص بك:
- إعداد بيئة البرمجة، وتنزيل كود مصدر التحكم في الطيران، ودراسة بنيته ووحداته الوظيفية، وما إلى ذلك.
- بمجرد التعرف على إطار العمل الخاص بالكود، يمكنك البدء في البرمجة استنادًا إلى الكود الموجود.
ابدأ بنموذج التحكم في الطيران الأساسي وارجع إلى كتاب التحكم في الطيران Ardupilot الذي نقدمه للحصول على الإرشادات.
- تطوير التوسع الخارجي
يتيح لك التوسع الخارجي إضافة أجهزة خارجية بناءً على مهامك وسيناريوهاتك من خلال الواجهات المحجوزة لوحدة التحكم في الطيران. على سبيل المثال:
- أضف وحدة تدفق بصرية لتحديد المواقع والتحليق في الأماكن المغلقة.
- أضف رادار الليزر لتجنب العوائق.
- استخدم القياس عن بعد لتمكين التخطيط للطيران والمسار بشكل مستقل.
- قم بتثبيت جهاز كمبيوتر على متن الطائرة (على سبيل المثال، Raspberry Pi) واستخدم Dronekit-Python أو ROS لبرمجة التحكم في الطائرة بدون طيار.
الهدف من إضافة جهاز كمبيوتر على متن الطائرة هو التعامل مع المهام الأكثر تعقيدًا، مثل:
- استخدام كاميرا Raspberry Pi للتعرف البصري (يتطلب OpenCV، وYOLO، وما إلى ذلك).
- دمج بروتوكولات الاتصال للتحكم في طيران الطائرة بدون طيار.
- نقل بيانات الرحلة أو مقاطع الفيديو عالية الدقة عبر الشبكات.
لا يمكن تحقيق هذه الوظائف بالاعتماد فقط على وحدة التحكم في الطيران.
وتركز دراسة التوسع الخارجي بشكل أساسي على التطبيقات، وهو أيضًا الاتجاه الذي تتبعه معظم المسابقات على مستوى البلاد.بعد التعلم، يمكنك استكشاف المجالات المهمة للطائرات الذكية بدون طيار، مثل التعرف البصري، وتكامل الذكاء الاصطناعي مع الطائرات بدون طيار، والمزيد.
2. ما هي المتطلبات الأساسية للتنمية المستقلة؟
إن تعلم الطائرات بدون طيار عملية تدريجية. إن أنظمة الطائرات بدون طيار متعددة التخصصات ومتكاملة، وتشمل مجموعة واسعة من مجالات المعرفة. لتعلم تطوير الطائرات بدون طيار، يلزم توفر الأساسيات التالية:
- المهارات العملية الأساسية، بما في ذلك الكفاءة في استخدام مكاوي اللحام، ومفكات البراغي المختلفة، والأدوات الأخرى.
- المعرفة الأساسية للإلكترونيات: مفاهيم مثل الجهد والتيار والطاقة والقطبية والإشارات.
- المعرفة الأساسية للتحكم الآلي: التحكم PID، ردود الفعل، الإشارات الرقمية، الإشارات التناظرية، الخ.
- المهارات الأساسية للكمبيوتر: برامج التشغيل، المنافذ التسلسلية، معدلات الباود، إصدارات البرامج الثابتة، إصدارات البرامج.
- المعرفة الأساسية لطائرات Pixhawk بدون طيار.
- المعرفة الأساسية لنظام التشغيل أوبونتو.
- إتقان لغات البرمجة: مثل C++ وPython.
كيفية صنع طائرة بدون طيار Respberry PI؟