ST-3046-C001 عبارة عن مؤازرة ذكية للحافلة التسلسلية 6 فولت 40 كجم، تعتمد علبة سبائك الألومنيوم بالكامل، محرك بدون قلب، علبة تروس فولاذية، محرك بدون قلب، لوحة تحكم TTL قامت Feetech بالبحث والتطوير الذاتي، 12 بت عالية الدقة استشعار الترميز المغناطيسي. عزم الدوران المماطلة هو 40kg.cm، يمكن أن ردود الفعل موقف، السرعة، الجهد، التيار، درجة الحرارة، معلمات التحميل، وبالتالي، يمكن تحقيق الحماية من الحمل الزائد والتيار الزائد. إنها مناسبة للتطبيق في سيناريوهات تطبيق المعدات الصناعية والروبوتات وناقل الحركة.
SKU: STS3046
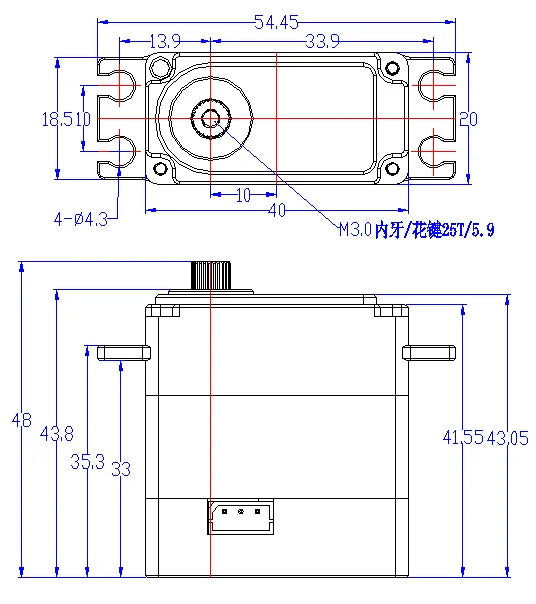
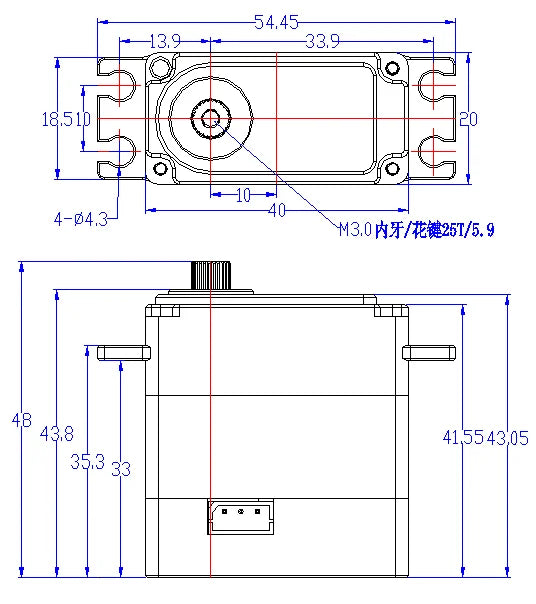
اسم المنتج: 7.4V 40KG.CM علبة بلاستيكية ميتال جير مشفر مغناطيسي عمود واحد TTL سيرفو الناقل التسلسلي
حجم المظهر: 45.2X24.7X35mm (انظر المخطط)
عزم الدوران:[email protected]
سرعة التوقف:[email protected]
التعليقات: الحمل/الموضع/السرعة/الجهد/التيار/درجة الحرارة
الحماية الإلكترونية: الحرارة الزائدة/التيار الزائد/الجهد الزائد/حماية الزائد




الميزات الهيكلية:
يعتمد الغلاف غلافًا بلاستيكيًا هندسيًا بقوة أعلى، ويحسن المسافة المركزية، وهيكل عام أكثر إحكاما، يعتمد ترس المؤازرة على مجموعة تروس نحاسية 1:345، وعزم دوران أعلى، وبنفس عزم الدوران ,مقارنة بحجم المؤازرة القياسي، يبدو أقل حجمًا (5 مم)، يعتمد الجسم على تصميم هيكل مزدوج المحور، الخصائص الهيكلية للصلب المبطن بالدائرة، وضع الأسلاك للكابلات الصادرة المزدوجة مع أبواق المؤازرة المعدنية الرئيسية، وهي مناسبة لـ التطبيق في الروبوت رباعي الأرجل، والروبوت الثعبان، والروبوت المكتبي، والروبوت البشري والذراع الميكانيكية.
وظيفة التحكم الإلكتروني:
1.وظيفة إيقاف بدء التسارع: يمكن ضبط قيمة السرعة والتسارع، وتأثير الحركة أكثر لطفًا.
2.دقة عالية، موضع مطلق 360 درجة دقة 4096 بت، أعلى دقة للموضع هي 0.088 درجة، إذا كان التحكم 90 درجة، أدخل 4096 / 360 * 90 = 1024، إذا كان التحكم 180 درجة، أدخل 4096 / 360 * 180 = 2048 ، وذلك للحساب.
3.هناك أربعة تبديل بين أوضاع العمل (الوضع 0 موضع مؤازر، الوضع 1 سرعة الحلقة المغلقة، الوضع 2 السرعة المفتوحة، الوضع 3 خطوات مؤازرة).
1)、الوضع 0: وضع الموقع، الوضع الافتراضي. في هذا الوضع، يمكن تحقيق التحكم المطلق بزاوية 360 درجة. دعم حركة التسارع.
2)、الوضع 1: سرعة الحلقة المغلقة، في واجهة البرمجة، يتم ضبط وضع التشغيل على 1، والتبديل إلى وضع السرعة المغلقة، وإدخال السرعة المقابلة في عمود السرعة للتشغيل .
3)、الوضع 2: سرعة الحلقة المفتوحة، في واجهة البرمجة، يتم ضبط وضع التشغيل على 2، والتبديل إلى وضع السرعة المفتوحة، وأدخل الوقت المقابل في عمود الوقت للتشغيل.
4)、Mode3: وضع الخطوة: في واجهة البرمجة، يتم ضبط الحد الأقصى/الحد الأدنى للزاوية على 0، ويتم ضبط وضع التشغيل على 3. قم بالتبديل إلى وضع الخطوة. أدخل الموضع في شريط الموضع للتقدم نحو الموضع المستهدف. انقر على الموضع مرة أخرى لمواصلة التحرك في نفس الاتجاه.
4.وضع الدوران المتعدد، تحكم مطلق وردود فعل 360 درجة، في ظل أعلى دقة، يمكن أن يكون التحكم المطلق في الموضع زائد أو ناقص 7 دورات، ولكن لا يتم حفظ عدد دورات الطاقة، ويتم الاحتفاظ فقط بقيمة ردود الفعل المطلقة للموضع.
5、معايرة مفتاح واحد، تثبيت بزاوية 360 درجة في أي موضع، (40 (عشري) إدخال العنوان 128 (عشري)) الموضع الحالي لتصحيح المفتاح هو الوسط (2048 (عشري)).
6、مستوى اتصال TTL، اتصال غير متزامن نصف مزدوج، دعم بروتوكول الناقل لضبط معلمات القراءة والكتابة، وإضافة وظيفة قراءة متزامنة (إرسال تعليمات لتلقي تعليمات القراءة من كل مؤازرة في الحافلة بدورها.)
7、وسائل حماية متعددة، (الحمل الزائد والتيار الزائد والجهد الزائد والسخونة الزائدة وإعدادات المفتاح وتغيير معلمة الحالة)
1) 、 الحماية من الحمل الزائد: من خلال الكشف عن الموضع، أثناء الحركة من وضع البداية إلى الموضع المستهدف، عندما يتم اكتشاف أن الموضع الحالي ليس هو الموضع المستهدف بعد مواجهة حجب العوائق، تستمر قوة التفريغ لمدة 2 ثانية (20٪) من قوة الحجب الافتراضية). حتى يتم تشغيل أمر جديد، قم بإصدار الحماية
2)、حماية التيار الزائد: من خلال القيمة الحالية المحددة، تحقق مما إذا كان التيار يصل إلى القيمة الحالية المحددة. عندما تصل إلى القيمة الحالية المحددة، حرر القوة (عزم الدوران الافتراضي هو 0). حتى يتم تشغيل أمر جديد، قم بتحرير الحماية
3)、حماية الجهد الزائد: كشف قيمة الجهد الحالي. إذا تجاوزت قيمة الجهد المحدد، فسيعرض المنبه الجهد الزائد.
4)、الحماية من الحرارة الزائدة: كشف درجة حرارة المحرك الحالية. إذا تجاوزت درجة الحرارة القيمة المحددة، فسيعرض المنبه ارتفاع درجة الحرارة.
8: ردود فعل متعددة:
1) تحميل التعليقات: يعمل خرج التحكم الحالي على تشغيل دورة عمل الجهد للمحرك، و المقياس الكامل هو 1000 = 100% من عزم الدوران الناتج.
2) التغذية المرتدة الحالية: تيار العمل المؤازر، 1 = 6.5 مللي أمبير
3) التغذية المرتدة الجهد: جهد العمل المؤازر، 70 = 7 فولت، 0.1 فولت
4) ردود الفعل على درجة الحرارة: درجة حرارة العمل الداخلية للمؤازرة الحالية (قياس درجة الحرارة) .

خدماتنا: نحن نقدم حلولًا مخصصة شاملة لتصنيع التصميم الأصلي (ODM) وتصنيع المعدات الأصلية (OEM). تشمل قدراتنا التصميم الإلكتروني والتصميم الهيكلي والإنتاج.بالإضافة إلى ذلك، نحن نقدم خدمات تخصيص لمنتجات مثل الماكينات مع ميزات مثل PWM، وRS485، وتشغيل 3V-24v، والتحكم في عجلة التغذية المرتدة من 0 إلى 360 درجة.
متخصص في تصنيع التصميم الشخصي وتصنيع المعدات الأصلية والتصنيع حسب الطلب 1. شعارك أو طباعته
2. سلك مؤازر
3. التعبئة: كيس PE ، صندوق ألوان ، صندوق بلاستيكي
شعارك
4. موصل الكابل
5. أجهزة جهد عمل واسعة مخصصة
9、افتح معلمات PID.
لقد حصلت منتجاتنا على شهادة CE وROHS، وقد تقدم معظمها بطلب للحصول على براءات اختراع المظهر وبراءات اختراع نماذج المنفعة
لقد حصلت منتجاتنا على شهادات من 'CE'، و'RoHS'، و'REACH'. بالإضافة إلى ذلك، نحن نمتلك براءات اختراع المظهر وبراءات الاختراع النموذجية لتصميماتنا.