




كاميرا العمق ثلاثية الأبعاد Orbbec Femto Bolt – بديل Azure Kinect DK الموصى به من مايكروسوفت، بدقة 1 ميجابكسل ToF، RGB بدقة 4K، وIMU
كاميرا العمق ثلاثية الأبعاد Orbbec Femto Bolt – بديل Azure Kinect DK الموصى به من مايكروسوفت، بدقة 1 ميجابكسل ToF، RGB بدقة 4K، وIMU
Orbbec
تعذر تحميل توفر الالتقاط
نظرة عامة
كاميرا العمق ثلاثية الأبعاد Orbbec Femto Bolt هي كاميرا مدمجة تم تطويرها بالتعاون بين Orbbec و Microsoft. تتضمن مستشعر عمق iToF، وكاميرا ملونة بدقة 4K، ووحدة IMU بزاوية 6DoF، مما يوفر أوضاع تشغيل عمق وأداء متطابقين مع Microsoft Azure Kinect و Orbbec Femto Mega. يوفر اتصال USB Type-C واحد البيانات والطاقة، بينما يتيح التزامن الدقيق للتشغيل الموثوق لشبكات متعددة المستشعرات.
بديل موصى به من Microsoft لـ Azure Kinect DK
الميزات الرئيسية
- كاميرا عمق مع مستشعر ToF بدقة 1 ميغا بكسل؛ زاوية رؤية واسعة تصل إلى 120°
- دقة العمق تصل إلى 1024 × 1024 @15fps، أو 640 × 576 @30fps
- 4K RGB (حتى 3840 × 2160 @30fps) مع HDR
- وحدة IMU بزاوية 6DoF
- USB Type-C 3.2 كابل واحد للطاقة والبيانات
- تحكم متقدم ودقيق في تزامن الإشارات لشبكات متعددة المستشعرات (تزامن 8 دبابيس؛ متوافق مع محور تزامن Orbbec باستخدام كابلات RJ45/CAT)
- يستخدم تقنية ToF المعتمدة من مايكروسوفت؛ يدعم Orbbec SDK و K4A Wrapper للانتقال السريع من Azure Kinect DK، ويمكن استخدامه مع Microsoft Body Tracking SDK
المواصفات
| بيئة التشغيل | داخلية / شبه خارجية |
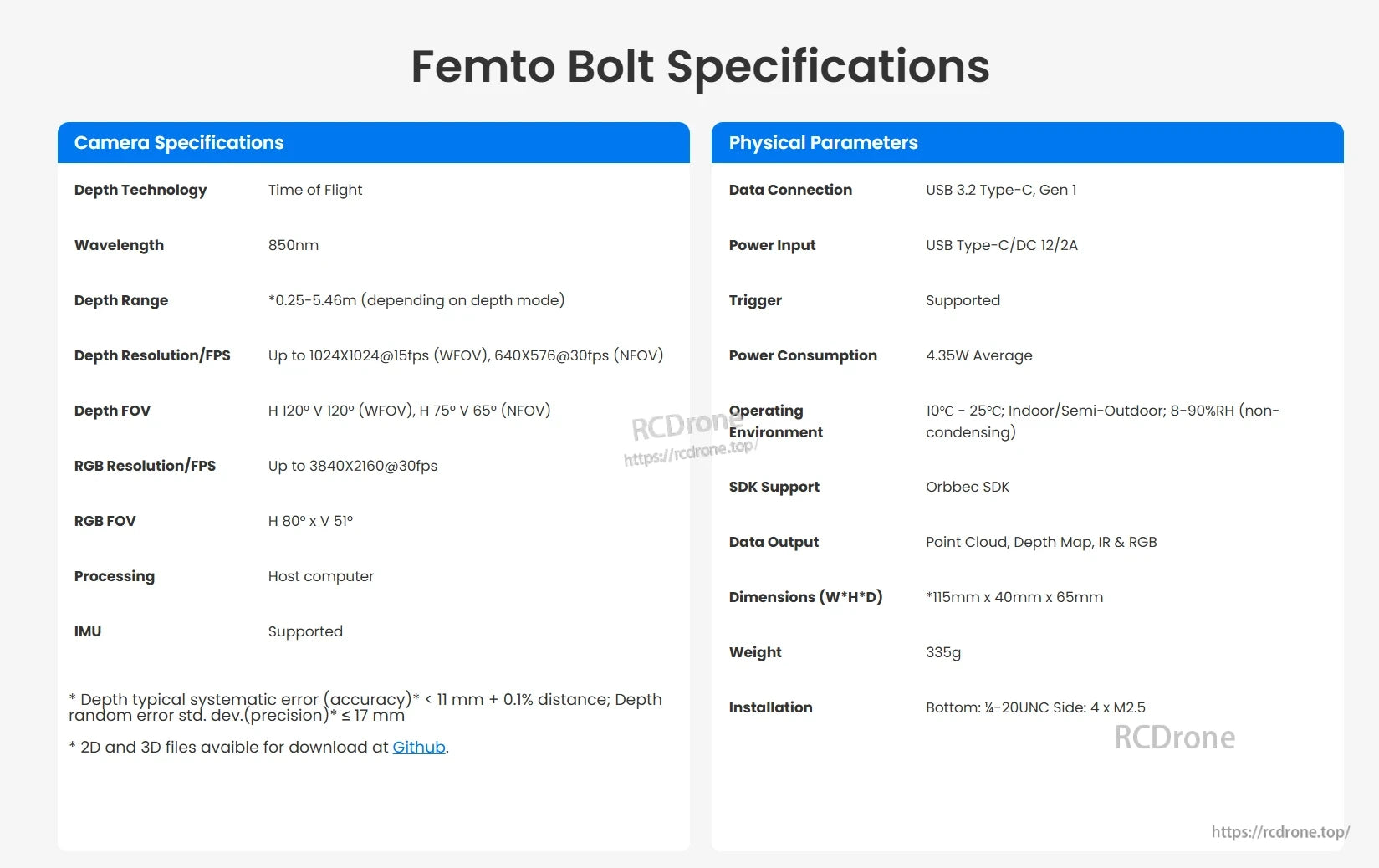
| تقنية العمق | iToF (زمن الطيران) |
| طول الموجة | 850 نانومتر |
| نطاق العمق | 0.25–5.46 متر |
| دقة مكانية | < 11 مم + 0.1% المسافة؛ انحراف معياري للخطأ العشوائي في العمق≤ 17 مم |
| عمق مجال الرؤية | مجال رؤية واسع 120° × 120°؛ مجال رؤية ضيق 75° × 65° |
| دقة العمق / معدل الإطارات | حتى 1024 × 1024 @15fps (مجال رؤية واسع)؛ 640 × 576 @30fps (مجال رؤية ضيق) |
| نوع غالق العمق | غالق عالمي |
| دقة RGB / معدل الإطارات | حتى 3840 × 2160 @30fps |
| مجال رؤية RGB | 80° × 51° |
| نوع غالق RGB | غالق متدحرج |
| وحدة قياس التسارع (IMU) | مدعوم (6DoF) |
| مجموعة تطوير البرمجيات (SDK) | Orbbec SDK؛ K4A Wrapper |
| مخرجات البيانات | سحابة النقاط، خريطة العمق، IR &و RGB |
| اتصال البيانات | USB 3.2 Type‑C, Gen 1 |
| مزود الطاقة | DC: 12V / 2A; USB: 5V / 3A |
| استهلاك الطاقة | 4.35W متوسط |
| موصل | USB Type‑C |
| منفذ مزامنة متعدد الأجهزة | 8‑pin |
| درجة حرارة التشغيل | 10℃ – 25℃ |
| الرطوبة | 8–90%RH (غير مكثف) |
| الأبعاد (العرض × الارتفاع × العمق) | 115 مم × 40 مم × 65 مم |
| الوزن | 335غ |
| التثبيت | القاعدة: 1/4‑20 UNC; الجانب: 4 × M2.html 5 |
| الحماية | غير متوفر |
| المعالجة | جهاز الكمبيوتر المضيف |
ما هو متضمن
- كاميرا فيمتو بولت ثلاثية الأبعاد
- محول طاقة 12 فولت 2 أمبير (موصل قابل للتبديل: الولايات المتحدة / الاتحاد الأوروبي)
- كابل USB-C إلى USB-A
التطبيقات
- الروبوتات: كشف الأجسام، التتبع، والقياس الدقيق للأبعاد للأذرع الروبوتية.
- الصحة: رؤية الكمبيوتر لتتبع حركة الجسم ومراقبة الوضعية باستخدام خوارزميات هيكلية.
- الوسائط: عمق 1 ميجابكسل بالإضافة إلى 4K لون لالتقاط حجمي في AR/XR والبث التفاعلي.
- القياس: قياس دقيق للحزم لتحسين دقة اللوجستيات والشحن.
التفاصيل
كاميرا فيمتو بولت هي كاميرا عمق ثلاثية الأبعاد مدمجة وعالية الأداء بتقنية ToF، اتصال USB-C، 4K RGB، IMU 6DoF، وتزامن متعدد المستشعرات. يدعم Azure Kinect SDK ويقدم حتى 15 إطارًا في الثانية بدقة عمق 1024x1024.
تستخدم Orbbec Femto Bolt تقنية Time of Flight مع طول موجي 850 نانومتر، ونطاق عمق من 0.25 إلى 5.46 متر، 1024×1024@15fps depth، 3840×2160@30fps RGB، USB 3.2 Gen 1، ويقيس 115×40×65 مم، ويزن 335 جرام.
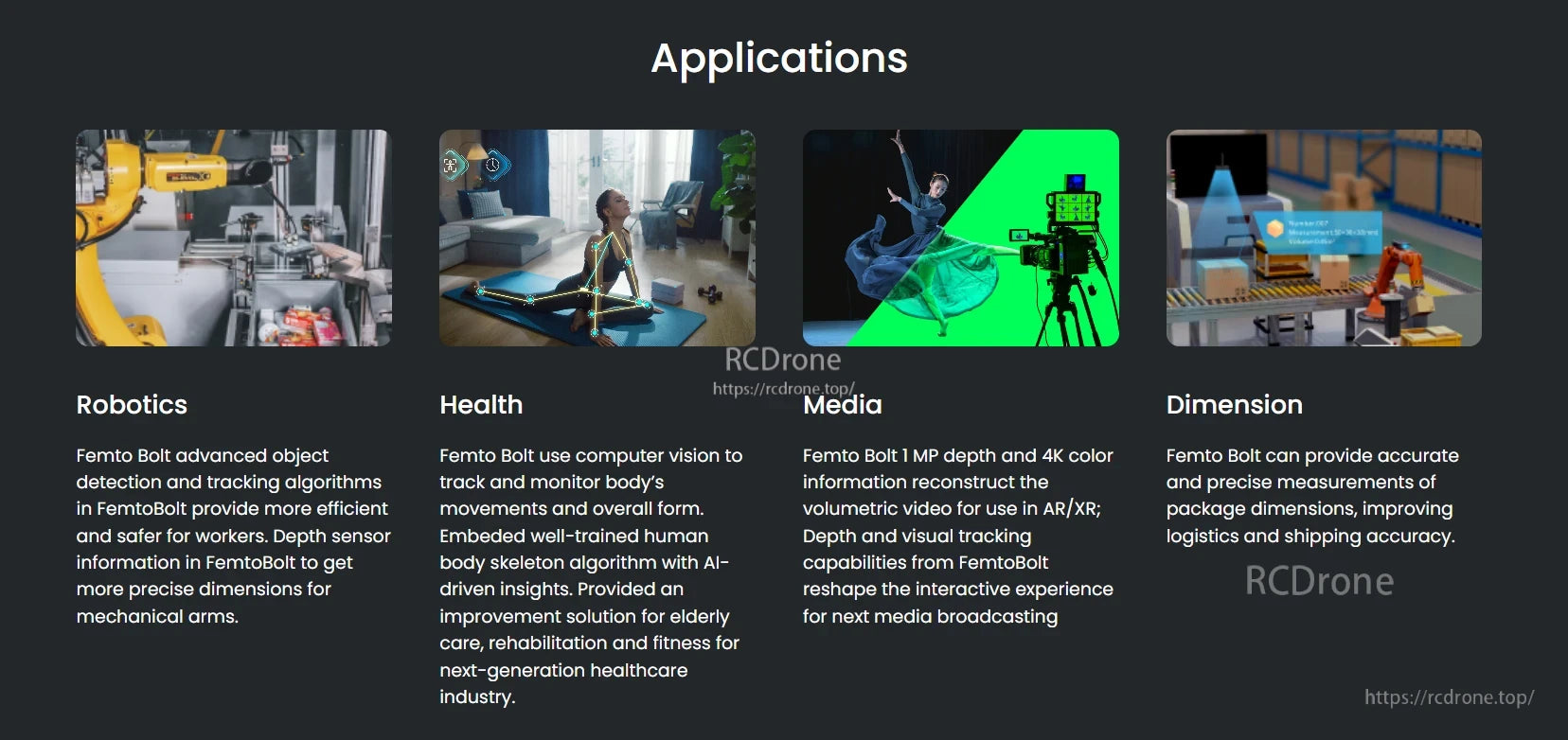
تمكّن كاميرا العمق ثلاثية الأبعاد Femto Bolt التطبيقات في مجالات الروبوتات، الصحة، الإعلام، والأبعاد. تقدم تتبعًا متقدمًا للأجسام، ومراقبة حركة الجسم، وفيديو حجمي للواقع المعزز/الواقع الممتد، وقياسات دقيقة للحزم باستخدام استشعار العمق المدفوع بالذكاء الاصطناعي ورؤية الكمبيوتر.

مستشعر RGB-D عالي الدقة في شكل مدمج، يتميز بزاوية رؤية تصل إلى 1200، مثالي لالتقاط المساحات الكبيرة.
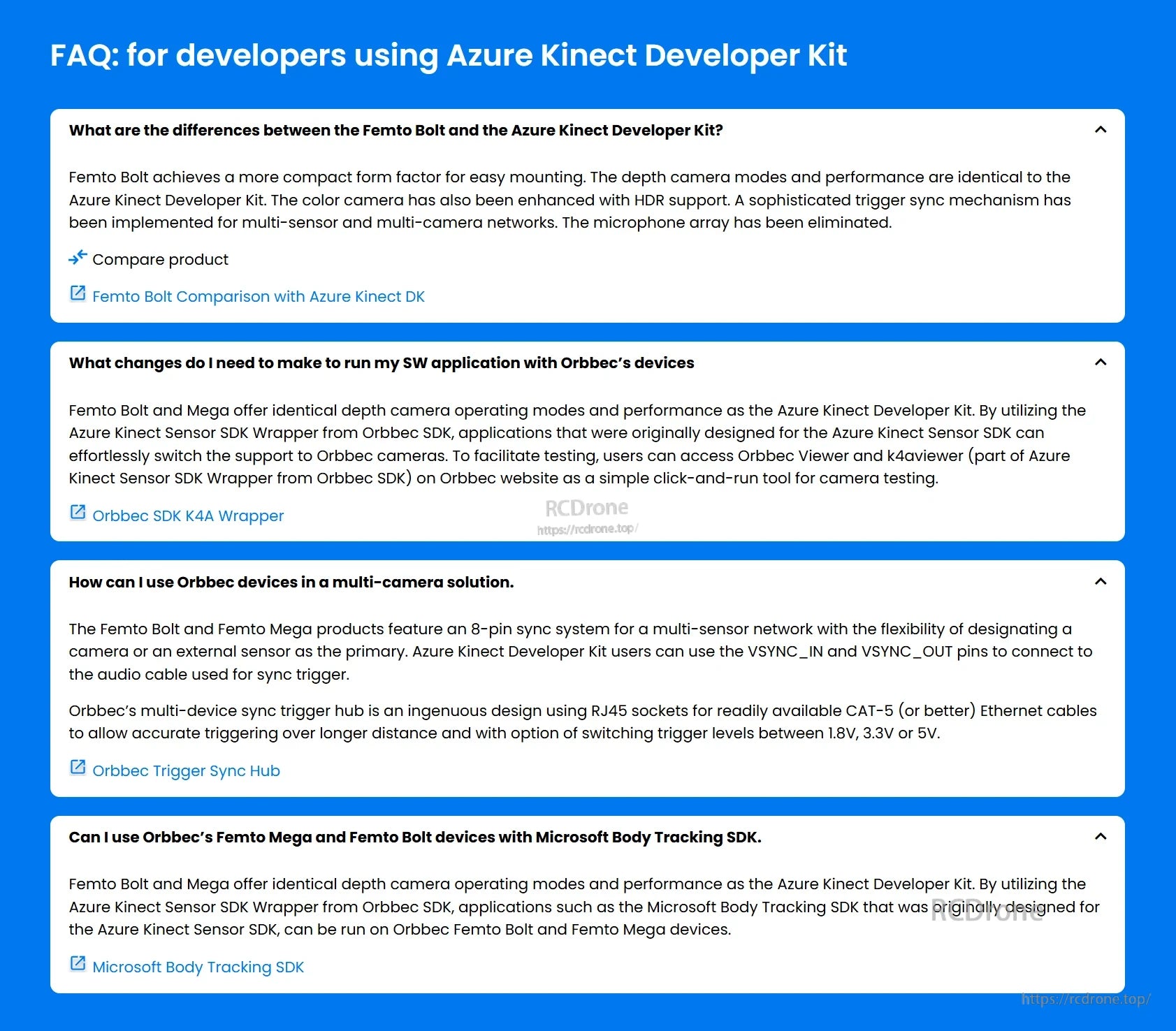
تغطي الأسئلة الشائعة للمطورين الذين يستخدمون مجموعة أدوات مطوري Azure Kinect الفروقات بين Femto Bolt وAzure Kinect، توافق SDK، حلول مزامنة الكاميرات المتعددة، ودعم SDK تتبع الجسم من Microsoft مع أجهزة Orbbec.
Related Collections




