كاميرا العمق Orbbec Femto Mega I، بدقة 1 ميجابكسل iToF، 4K RGB HDR، مقاومة IP65، إيثرنت PoE M12، زاوية رؤية 120°، متوافقة مع Jetson Nano، وحدة IMU
كاميرا العمق Orbbec Femto Mega I، بدقة 1 ميجابكسل iToF، 4K RGB HDR، مقاومة IP65، إيثرنت PoE M12، زاوية رؤية 120°، متوافقة مع Jetson Nano، وحدة IMU
Orbbec
تعذر تحميل توفر الالتقاط
نظرة عامة
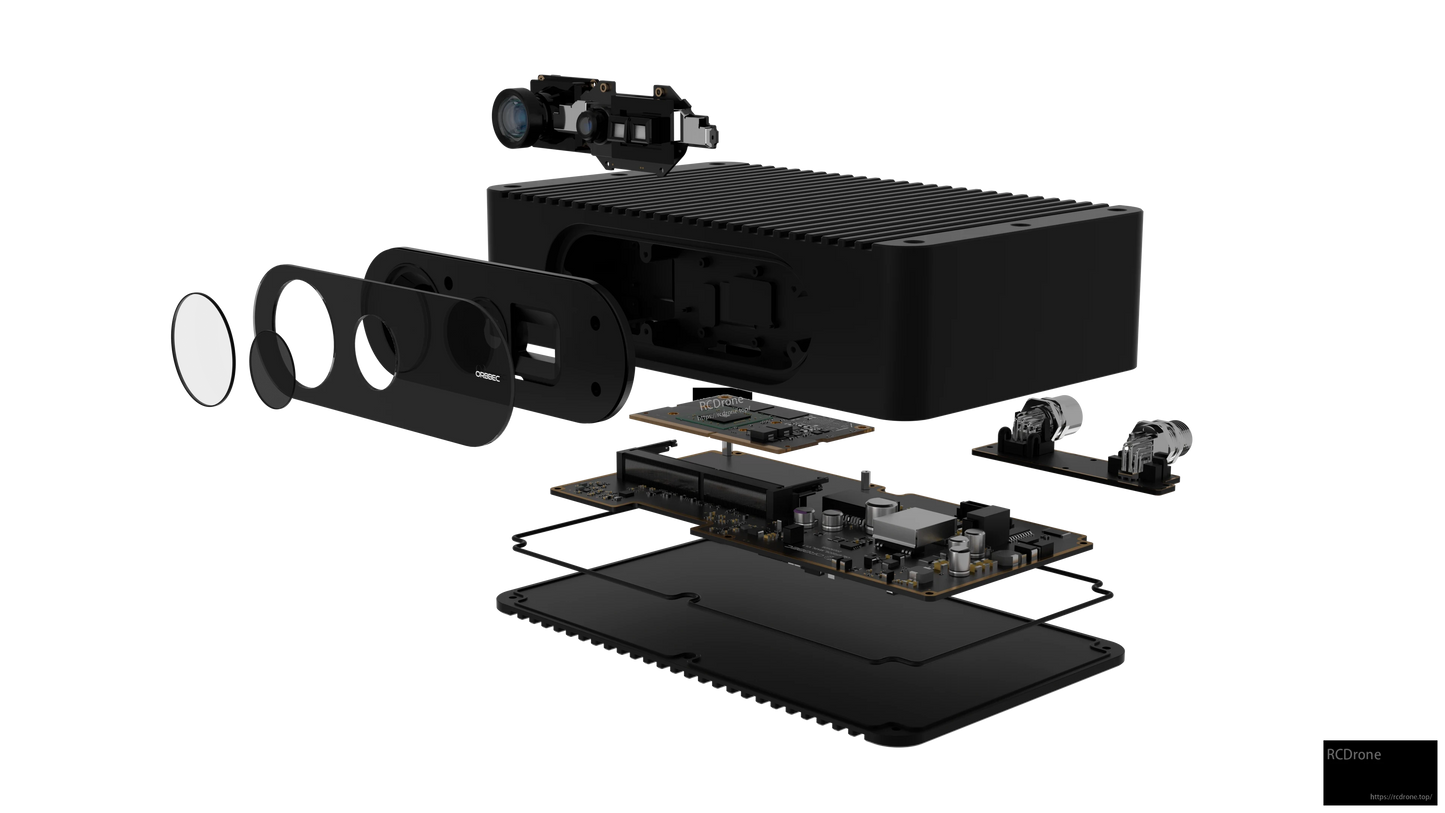
كاميرا Orbbec Femto Mega I هي كاميرا عمق ذات جودة صناعية مصممة لالتقاط RGB-D بشكل موثوق في البيئات القاسية. تجمع بين مستشعر عمق iToF بدقة 1 ميغا بكسل مع RGB بدقة 4K ووحدة IMU بزاوية 6DoF في غلاف محكم IP65. يقوم الجهاز ببث الصور المعالجة في الوقت الحقيقي عبر Ethernet ويجمع بين تقنية ToF من Microsoft وحوسبة NVIDIA لتمكين نظام رؤية معرف بالبرمجيات لتصور العمق المرن ومعالجة الصور.
تعتبر هذه الكاميرا متعددة الأوضاع القابلة للبرمجة مناسبة لأتمتة لوجستيات المستودعات، والتعامل مع المواد في خطوط الإنتاج، وقياس الأبعاد/حجم الأجسام الكبيرة.
الميزات الرئيسية
- كاميرا عمق iToF بدقة 1 ميجابكسل مع زاوية رؤية واسعة 120°
- 4K RGB مع HDR
- معالج NVIDIA Jetson Nano مدمج لمعالجة العمق على الجهاز
- IMU ب6 درجات من الحرية
- حماية من الغبار والماء IP65
- إيثرنت صناعي M12 X‑coding مع PoE (PoE+)
- تحكم دقيق في تزامن الأجهزة المتعددة لشبكات المستشعرات
المواصفات
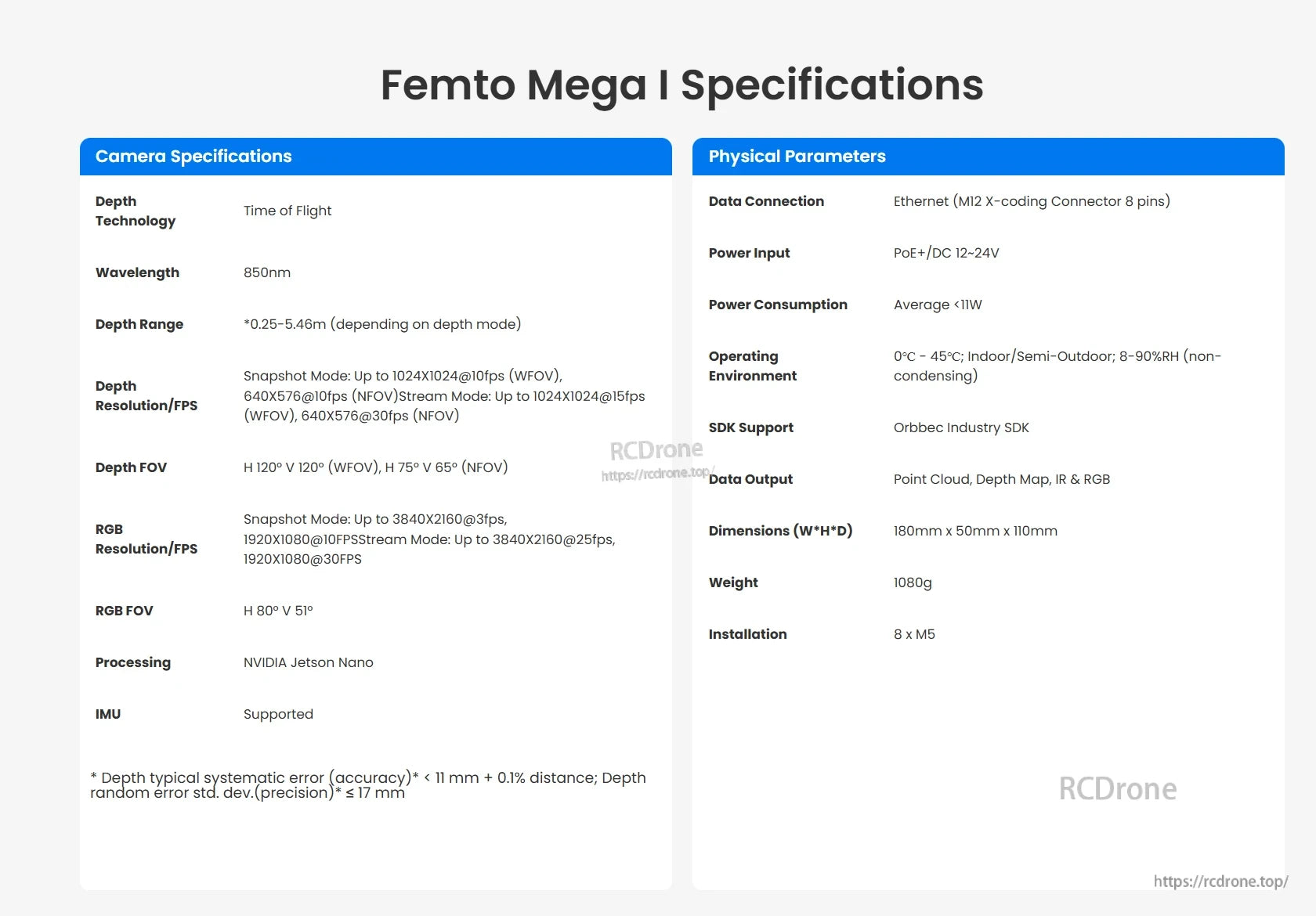
| بيئة التشغيل | داخلية / شبه خارجية؛ 0°C – 45°C؛ 8–90%RH (غير مكثف) |
| تكنولوجيا العمق | iToF (زمن الطيران) |
| طول الموجة | 850nm |
| نطاق العمق | 0.25–5.46م |
| الدقة المكانية (التحقق) | &< 11 مم + 0.1% مسافة؛ خطأ عشوائي في العمق (الدقة) ≤ 17 مم|
| مجال رؤية العمق | WFoV: H 120° × V 120°; NFoV: H 75° × V 65° |
| دقة العمق / معدل الإطارات | لقطة: حتى 1024×1024@10fps (WFOV)، 640×576@10fps (NFOV) بث: حتى 1024×1024@15fps (WFOV)، 640×576@30fps (NFOV) |
| نوع غالق العمق | غالق عالمي |
| مجال رؤية RGB | H 80° × V 51° |
| دقة RGB / معدل الإطارات | لقطة: حتى 3840×2160@3fps، 1920×1080@10FPS بث: حتى 3840×2160@25fps، 1920×1080@30FPS |
| نوع غالق RGB | غالق متدحرج |
| مدخل الطاقة | DC 12–24V; PoE+ (802.3ع، 24 واط) |
| استهلاك الطاقة | متوسط <11 واط |
| اتصال البيانات | إيثرنت (جيجابت)، موصل M12 X‑coding، 8 دبابيس |
| الحماية | IP65 |
| منفذ مزامنة متعدد الأجهزة | 12 دبوس A‑code |
| دعم SDK | Orbbec SDK الصناعة |
| مخرجات البيانات | سحابة النقاط، خريطة العمق، IR & RGB |
| المعالجة | NVIDIA Jetson Nano |
| IMU | مدعوم (6DoF) |
| الأبعاد (عرض×ارتفاع×عمق) | 180 مم × 50 مم × 110 مم |
| الوزن | 1080 غرام |
| التثبيت | 8 × M5 |
ما هو متضمن
- كاميرا فيمتو ميغا 3D
- قوس على شكل L
- كابل M12-X مشفر إلى RJ45، 5م
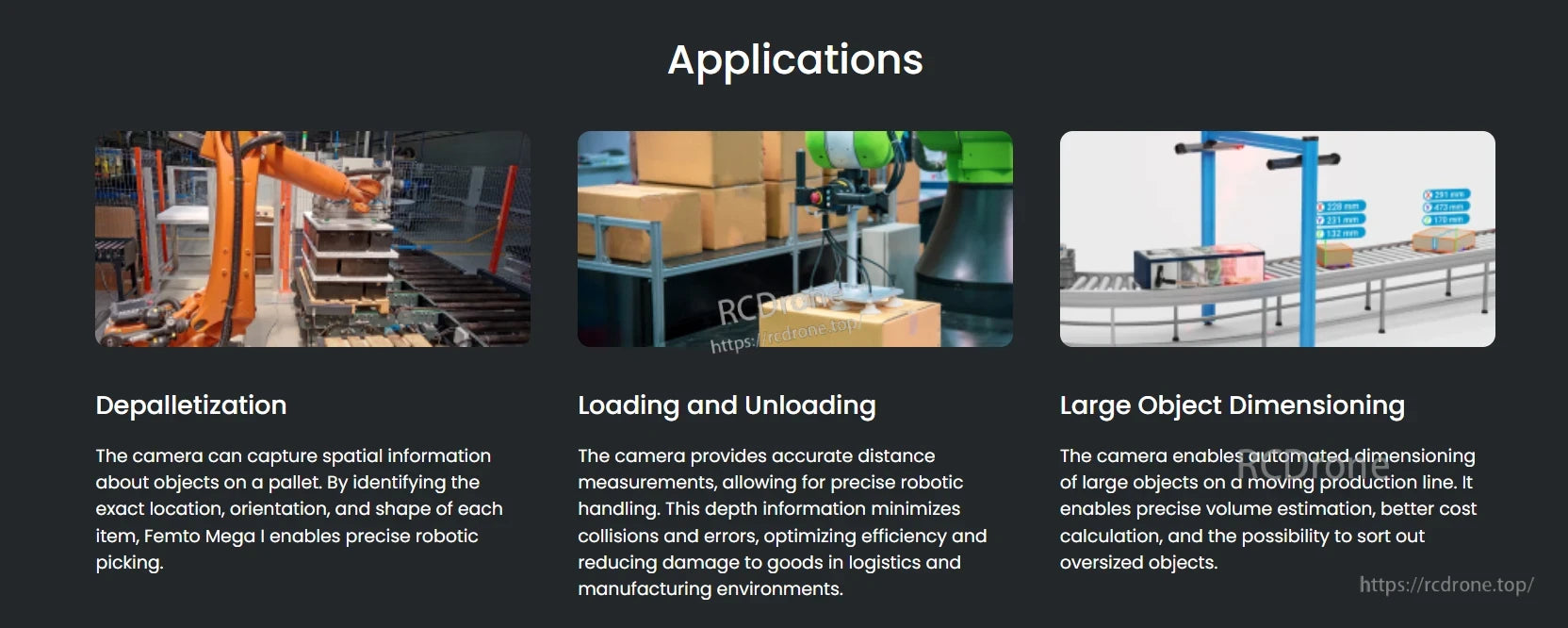
التطبيقات
إزالة الباليات
يجمع معلومات مكانية حول البضائع المعبأة على الباليات لتحديد الموقع، الاتجاه، والشكل لالتقاط دقيق بواسطة الروبوت.
تحميل وتفريغ
يوفر قياسات دقيقة للمسافات للتعامل الروبوتي لتقليل الاصطدامات وتحسين الكفاءة في اللوجستيات والتصنيع.
تحديد أبعاد الأجسام الكبيرة
يمكن من تحديد الأبعاد التلقائي وتقدير حجم العناصر الكبيرة على خطوط الإنتاج المتحركة لحساب التكاليف والفرز.
تفاصيل
تقدم Orbbec Femto Mega I استشعار العمق بتقنية Time of Flight (850nm، 0.25–5.46m)، 1024×1024@10fps deptعرض، 3840×2160@30fps RGB، معالجة Jetson Nano، PoE+، ويبلغ قياسها 180×50×110mm، بوزن 1080g.
إزالة البالتات، التحميل، التفريغ، وتحديد أبعاد الأجسام الكبيرة. يمكّن من التقاط دقيق بواسطة الروبوت، قياس دقيق للمسافات، وتقدير تلقائي للحجم للفرز على خطوط الإنتاج. (39 كلمة)
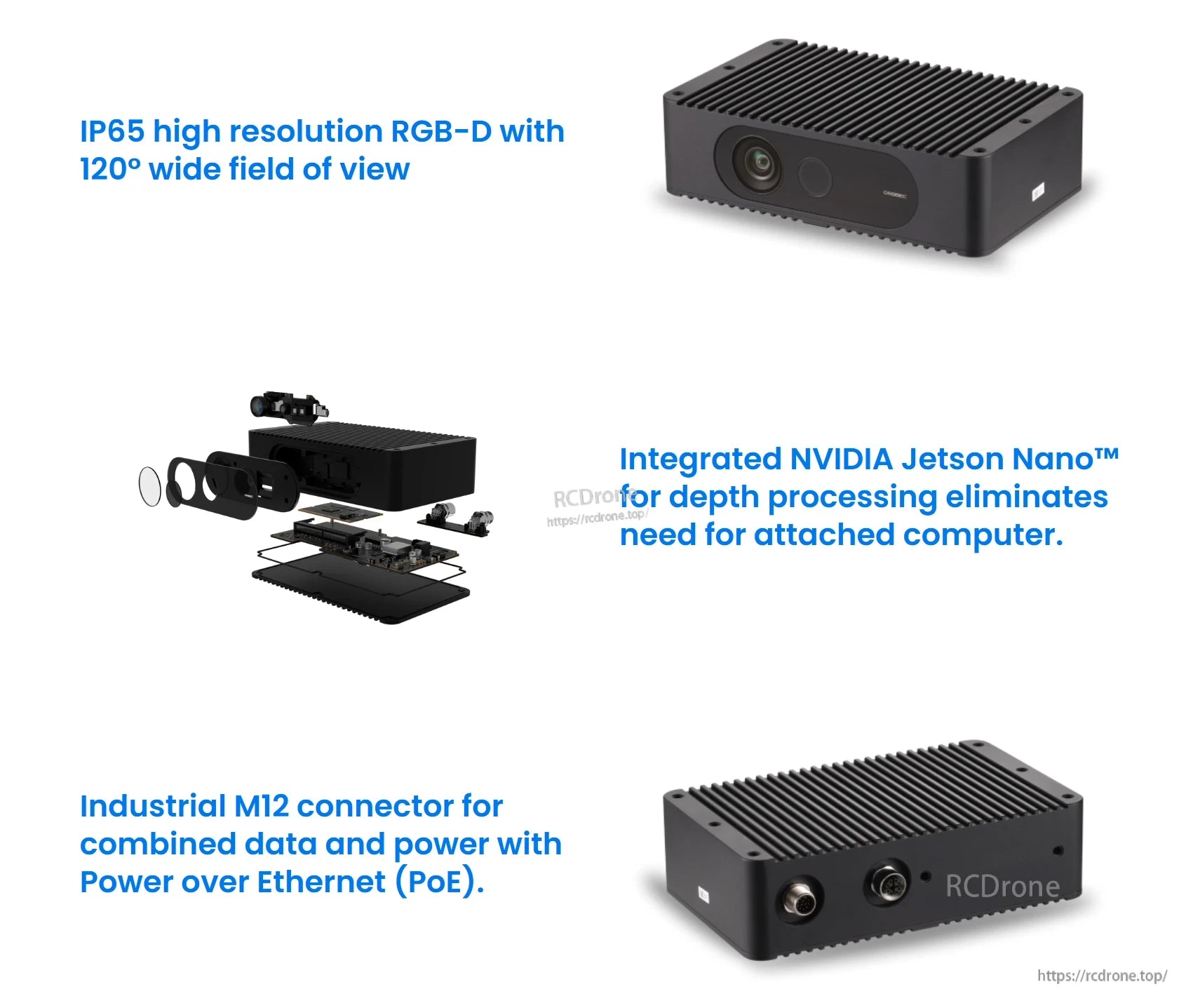
كاميرا IP65 RGB-D بزاوية رؤية 120°، NVIDIA Jetson Nano لمعالجة العمق، موصل M12 مع PoE.
Related Collections