


محرك عالي العزم HTDW-5047 وحدة محرك عالي العزم 50 مم 12-48 فولت مشفر 14-بت نسبة 9/20/36
محرك عالي العزم HTDW-5047 وحدة محرك عالي العزم 50 مم 12-48 فولت مشفر 14-بت نسبة 9/20/36
HIGH TORQUE
تعذر تحميل توفر الالتقاط
نظرة عامة
محرك HIGH TORQUE HTDW-5047 هو سلسلة من وحدات المحركات المدمجة عالية العزم المتاحة بثلاث نسب تخفيض (9 / 20 / 36). يتميز بدقة ترميز الإدخال/الإخراج 14 بت، ونطاق جهد من 12-48 فولت، وتردد تحكم يبلغ 3 كيلو هرتز للتحكم في الحركة ومفاصل الروبوتات.
الميزات الرئيسية
- النماذج: HTDW-5047-9-NE / HTDW-5047-20-NE / HTDW-5047-36-NE
- الرجوع المنخفض: <10 دقيقة قوس
- دقة إعادة تحديد الموضع: <12 دقيقة قوس؛ دقة تحديد الموضع المطلقة: <15 دقيقة قوس
- دقة التشفير: 14-بت (مدخل) و 14-بت (مخرج)
- معدل البود: 5 ميجابت في الثانية؛ زمن الاستجابة: ≤200 ميكروثانية
المواصفات
| المعلمة | HTDW-5047-9-NE | HTDW-5047-20-NE | HTDW-5047-36-NE |
|---|---|---|---|
| الطول والعرض | 50مم | 50مم | 50مم |
| الارتفاع | 47.4مم | 47.4مم | 47مم |
| الوزن | 300غ | 322غ | 321غ |
| الرجوع | <10 دقيقة قوسية | <10 دقيقة قوسية | <10 دقيقة قوسية |
| دقة إعادة تحديد الموقع | <12 دقيقة قوسية | <12 دقيقة قوسية | <12 دقيقة قوسية |
| دقة تحديد الموقع المطلقة | <15 دقيقة قوسية | <15 دقيقة قوسية | <15 دقيقة قوسية |
| ثابت العزم | 0.062 Nm/A | 0.062 Nm/A | 0.062 Nm/A |
| عدد أزواج الأقطاب | 14 | 14 | 14 |
| نسبة التخفيض | 9 | 20 | 36 |
| عزم الدوران المقفل | 6 Nm | 12 Nm | 21 Nm |
| سرعة بدون حمل RPM | 260 RPM | 130 RPM | 60 RPM |
| عزم الدوران المقياس | 1 Nm | 2 Nm | 4 Nm |
| سرعة الدوران المقياس RPM | 170 RPM | 110 RPM | 40 RPM |
| التقييم | 18 W | 23 W | 17 W |
| نطاق الجهد | 12-48V | 12-48V | 12-48V |
| التيار الذروي | 10 A | 10 A | 10 A |
| دقة التحكم في السرعة | ±8% | ±15% | ±15% |
| دقة إدخال التشفير | 14-بت | 14-بت | 14-بت |
| معدل البود | 5 ميجابت في الثانية | 5 ميجابت في الثانية | 5 ميجابت في الثانية |
| التيار المقنن | 2 أمبير | 2 أمبير | 2 أمبير |
| دقة التحكم | ±10% | ±15% | ±15% |
| زمن الاستجابة | ≤200 ميكروثانية | ≤200 ميكروثانية | ≤200 ميكروثانية |
| دقة إخراج التشفير | 14-بت | 14-بت | 14-بت |
| تردد التحكم | 3 كيلوهرتز | 3 كيلوهرتز | 3 كيلوهرتز |
لإرشادات الاختيار والدعم بعد البيع، اتصل بـ [email protected] or زيارة https://rcdrone.top/.
التطبيقات
- الروبوتات البشرية
- الأذرع الروبوتية
- الهياكل الخارجية
- الروبوتات رباعية الأرجل
- مركبات AGV
- روبوتات ARU
الدلائل
- دليل مستخدم مساعد تصحيح الأخطاء لمحرك HTDW-5047-9-NE عالي العزم (PDF)
- دليل مستخدم مساعد تصحيح الأخطاء لمحرك HTDW-5047-20-NE عالي العزم (PDF)
- دليل مستخدم مساعد تصحيح الأخطاء لمحرك HTDW-5047-36-NE عالي العزم (PDF)
- دليل تصحيح الأخطاء HTDW-5047-9-NE (PDF)
- دليل تصحيح الأخطاء HTDW-5047-20-NE (PDF)
- دليل تصحيح الأخطاء HTDW-5047-36-NE (PDF)
- تحليل بروتوكول 1.2 fdcan HTDW-5047-9-NE (PDF)
- تحليل بروتوكول 1.2 fdcan HTDW-5047-20-NE (PDF)
- HTDW-5047-36-NE 1.تحليل بروتوكول 2 fdcan (PDF)
- نموذج ثلاثي الأبعاد لمحرك HTDW-5047-9-NE (STP، ZIP)
- نموذج ثلاثي الأبعاد لمحرك HTDW-5047-20-NE (STP، ZIP)
- نموذج ثلاثي الأبعاد لمحرك HTDW-5047-36-NE (STP، ZIP)
- دليل مستخدم HTDW-5047 (PDF)
التفاصيل

تجمع سلسلة HTDW-5047 بين شكل مضغوط بحجم 50 مم وعزم دوران عالي لمفاصل الروبوتات والتحكم في الحركة.
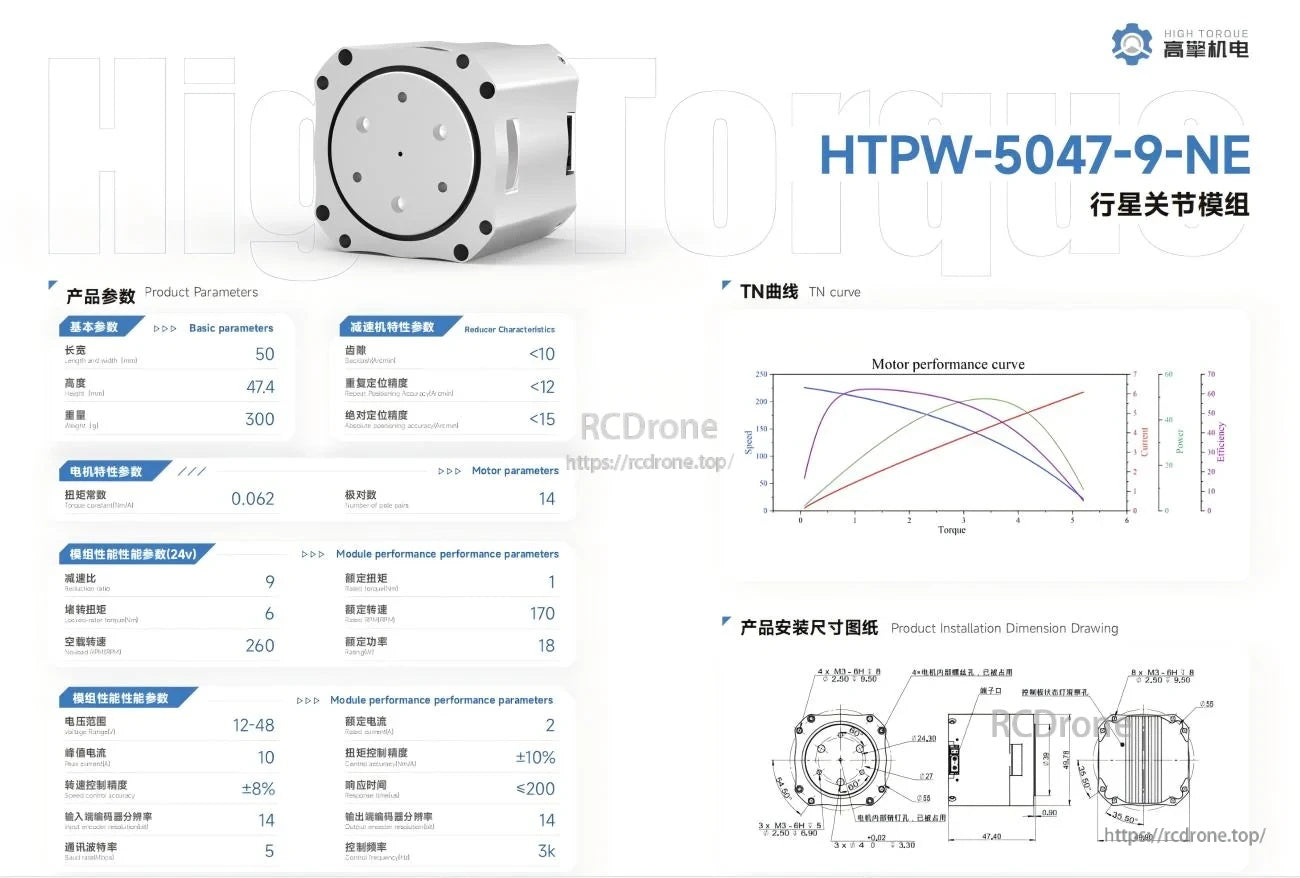
اختر نسخة التخفيض 9:1 عندما تكون السرعة الأعلى هي الأولوية مع الحفاظ على نفس مساحة الوحدة.
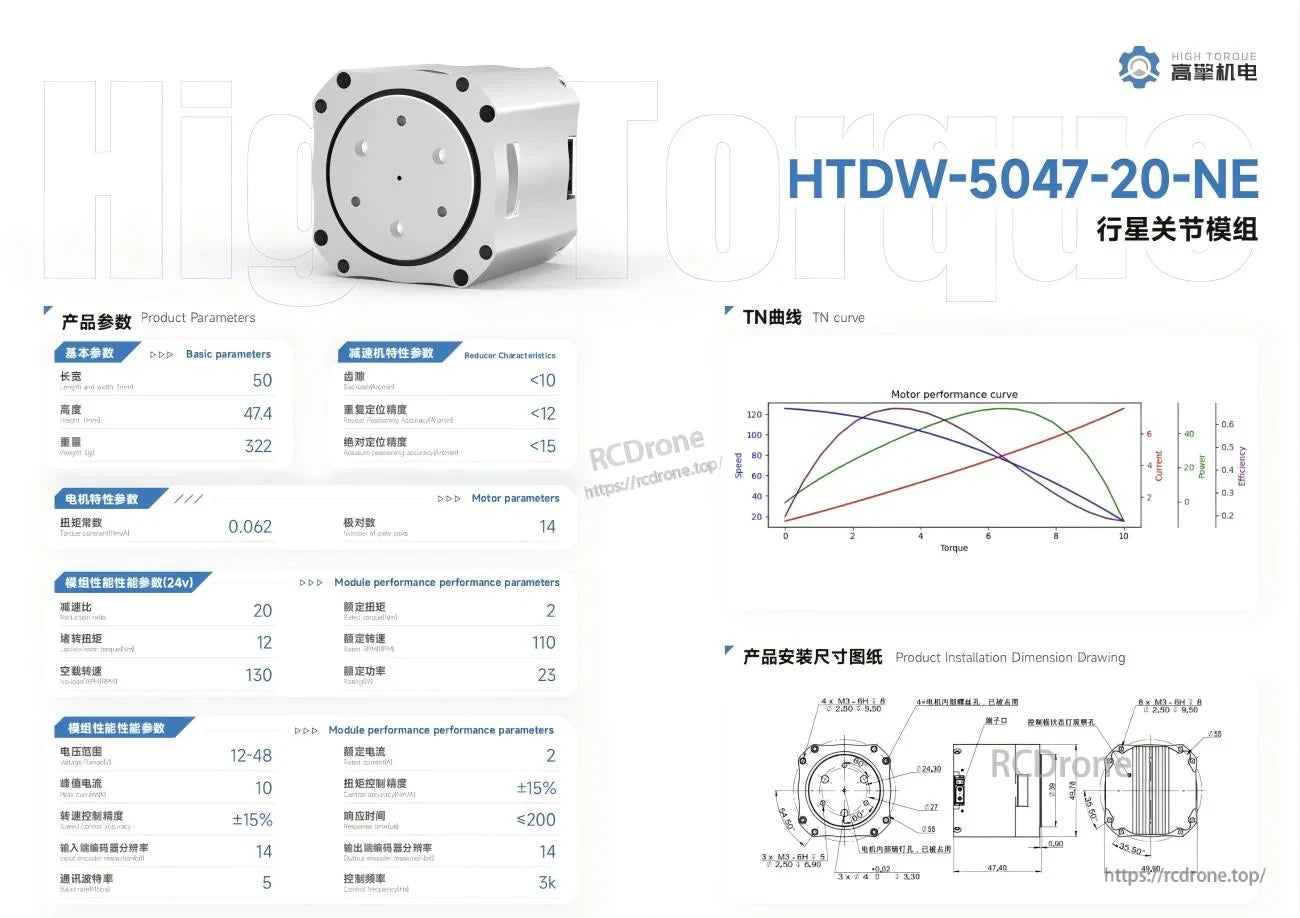
توازن خيار التخفيض 20:1 بين السرعة والعزم لمفاصل ومحركات الروبوتات العامة.
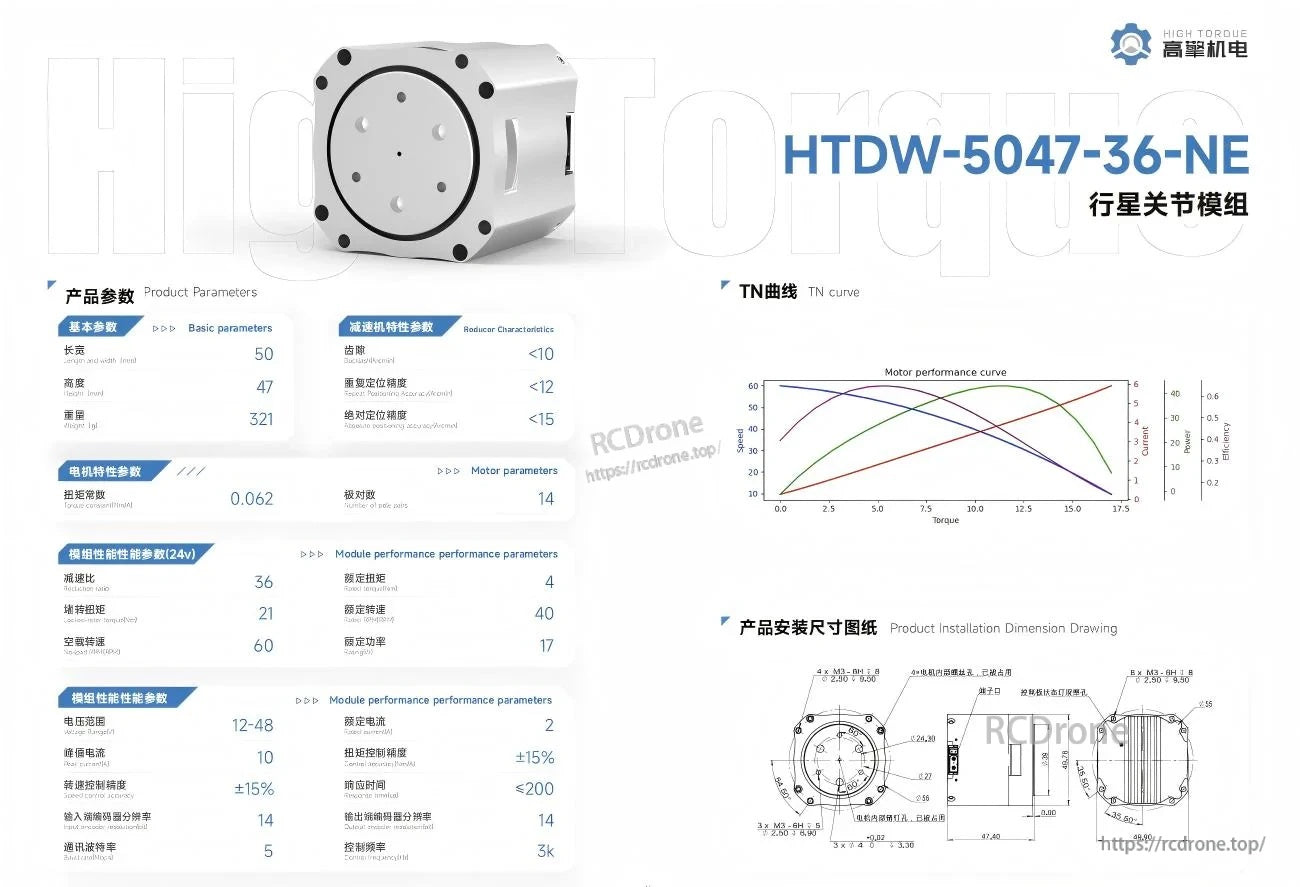
تتناسب النسخة ذات التخفيض 36:1 مع المفاصل ذات السرعة المنخفضة وعزم الدوران العالي حيث يكون تحديد الموقع الدقيق أمرًا حاسمًا.
Related Collections


