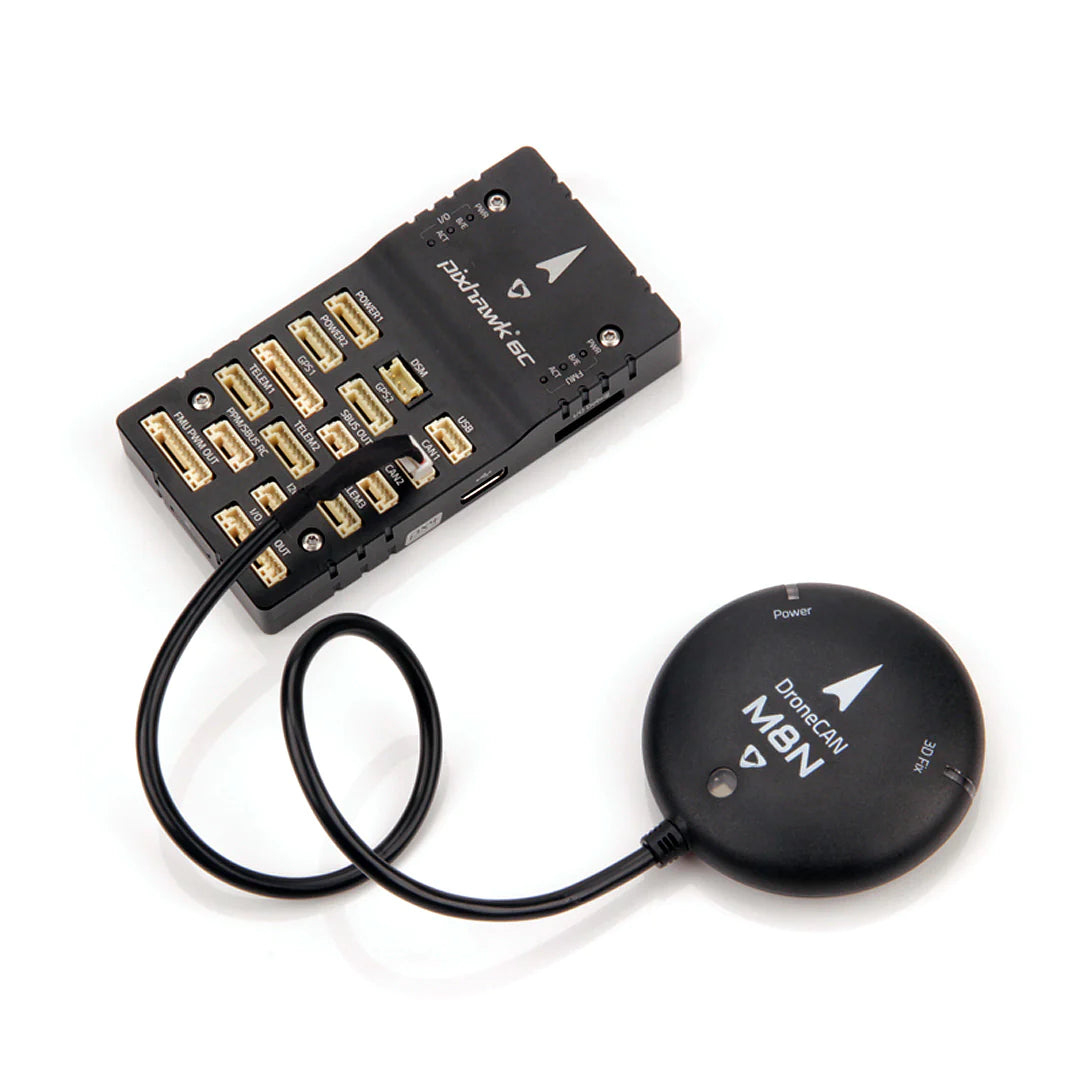
وحدة نظام تحديد المواقع Holybro DroneCAN M8N - معالج STM32G4 BMM150 بوصلة 3GNSS تدعم بروتوكول DroneCAN
وحدة نظام تحديد المواقع Holybro DroneCAN M8N - معالج STM32G4 BMM150 بوصلة 3GNSS تدعم بروتوكول DroneCAN
HolyBro
سعر عادي
$98.00 USD
سعر عادي
سعر البيع
$98.00 USD
سعر الوحدة
per
Taxes included.
الشحن محسوب عند السداد.
تعذر تحميل توفر الالتقاط
الوصف
يحتوي نظام تحديد المواقع Holybro DroneCAN على وحدة UBLOX M8N أو M9N، وبوصلة BMM150، ومؤشر LED ثلاثي الألوان. يحتوي على معالج STM32G4 واعتمد بروتوكول DroneCAN للاتصال، مما يجعله أكثر موثوقية وأفضل في التعامل مع التداخل الكهرومغناطيسي مقارنة بالاتصال التسلسلي. ولا يشغل أي منفذ تسلسلي لوحدة التحكم في الطيران، ويمكن توصيل أجهزة CAN المختلفة بنفس ناقل CAN عبر لوحة تقسيم CAN.
المواصفات:
| الطائرة بدون طيار CAN M8N | |
| مستقبل GNSS | أوبلوكس نيو M8N |
| عدد أنظمة GNSS المتزامنة | ما يصل إلى 3 GNSS (GPS، وGalileo، وGLONASS، وBeiDou) |
| المعالج | STM32G4 (170 ميجا هرتز، 512 كيلو فلاش) |
| البوصلة | BMM150 |
| نطاق التردد | نظام تحديد المواقع: L1C/A غلوناس: L10F بيدو: B1I جاليليو: E1B/C |
| نظام تعزيز GNSS | SBAS: WAAS، EGNOS، MSAS، QZSS |
| تحديث التنقل | 5 هرتز افتراضي(10 هرتز كحد أقصى) |
| الدقة | 2.5 م |
| دقة السرعة | 0.05 م/ث |
| الحد الأقصى لعدد الأقمار الصناعية | 22+ |
| بروتوكول الاتصال | DroneCAN @ 1 ميجابت/ثانية |
| يدعم الطيار الآلي FW | PX4، اردوبايلوت |
| نوع المنفذ | GHR-04V-S |
| الهوائي | هوائي تصحيحي من السيراميك مقاس 25 × 25 × 4 مم |
| استهلاك الطاقة | أقل من 200 مللي أمبير عند 5 فولت |
| الجهد الكهربائي | 4.7-5.2 فولت |
| درجة حرارة التشغيل | -40~80 درجة مئوية |
| الحجم | القطر: 54 ملم السُمك: 14.5 ملم |
| الوزن | 36 جرام |
| طول الكابل | 26 سم |
| ملاحظات أخرى | - LNA MAX2659ELT+ مضخم الترددات اللاسلكية - سعة فرح قابلة لإعادة الشحن - منظم منخفض الضوضاء 3.3 فولت |
للحصول على معلومات فنية أخرى، يرجى الانتقال إلى https://docs.holybro.com/
الطائرة بدون طيار
DroneCAN هو بروتوكول CAN الأساسي الذي يستخدمه مشروعا ArduPilot وPX4 للتواصل مع الأجهزة الطرفية لـ CAN. وهو بروتوكول مفتوح مع اتصال مفتوح ومواصفات وتطبيقات مفتوحة متعددة.
تطوير DroneCAN
يحتوي مشروع DroneCAN على مجتمع تطوير نشط.
- مناقشات حول الخلاف في https://dronecan.org/discord
- التطوير على github في https://github.com/DroneCAN
Related Collections