وحدة تحكم الطيران Holybro Pixhawk 6X (ICM-45686) – ثلاثية التكرار IMU، معالج STM32H753، إيثرنت، متوافقة مع PX4 وArduPilot
وحدة تحكم الطيران Holybro Pixhawk 6X (ICM-45686) – ثلاثية التكرار IMU، معالج STM32H753، إيثرنت، متوافقة مع PX4 وArduPilot
HolyBro
تعذر تحميل توفر الالتقاط
نظرة عامة
تحكم الطيران Holybro Pixhawk 6X (ICM-45686) هو وحدة تحكم طيران أوتوماتيكية عالية الأداء وقابلة للتعديل مصممة لتطبيقات الطائرات بدون طيار الصناعية والتجارية المت demanding. يتميز بـ وحدات قياس التسارع ICM-45686 ثلاثية التكرار مع تقنية BalancedGyro™، وبارومترات مزدوجة، ومعالج STM32H753 يعمل بسرعة 480 ميجاهرتز، يوفر Pixhawk 6X موثوقية لا مثيل لها، وأداء في الوقت الحقيقي، ومرونة. إن بنيته القابلة للتعديل، وعزل الاهتزاز المتقدم ، وواجهة Ethernet تجعلها مثالية لأنظمة الطائرات بدون طيار التي تتطلب تحكمًا قويًا، ودقة، وقابلية التكيف مع المهام.
الميزات الرئيسية
-
تكرار IMU ثلاثي: 3x ICM-45686 IMUs (±32g) مع تقنية BalancedGyro™ للملاحة القابلة للتحمل للأخطاء
-
بارومترات مزدوجة: ICP20100 و BMP388 لتحسين دقة الارتفاع
-
معالج عالي السرعة: STM32H753 Cortex-M7، 480MHz، مع 2MB فلاش و 1MB RAM
-
تصميم معياري: يفصل FMU و IMU واللوحة الأساسية، متصلة عبر 100-pin و 50-pin Pixhawk® Bus
-
لوحة IMU ذات التحكم في درجة الحرارة: تضمن أداءً مثاليًا للمستشعرات عبر نطاقات درجات الحرارة
-
تكامل Ethernet: يدعم الاتصال عالي السرعة مع أجهزة الكمبيوتر الخاصة بالمهام
-
دعم وحدة الطاقة الرقمية: يوفر قياسات أكثر دقة للجهد والتيار
نظام العزل المتقدم: مادة متينة مصممة خصيصًا توفر تخميد اهتزازات عالي الطيف
-
توافق البرنامج الثابت: يتم شحنه مع PX4 (الإصدار 1.14.3+)، يدعم ArduPilot (v4.5.0+)
المواصفات
المعالجات وأجهزة الاستشعار
| المكون | التفاصيل |
|---|---|
| معالج FMU | STM32H753، ARM Cortex-M7، 480MHz، 2MB فلاش، 1MB RAM |
| معالج IO | STM32F103، ARM Cortex-M3، 72MHz |
| أجهزة استشعار IMU | 3x ICM-45686 (BalancedGyro™) |
| بارومتر | ICP20100 و BMP388 |
| مقياس مغناطيسي | BMM150 |
| عنصر آمن | NXP SE050 Plug & Trust |
المعلمات الكهربائية
| المعلمة | Value |
|---|---|
| الجهد الأقصى المدخل | 6V |
| مدخل طاقة USB | 4.75~5.25V |
| جهد سكة السيرفو | 0~36V |
| حد التيار Telem1 & GPS2 | 1.5A مجتمعة |
| حد التيار للمنافذ الأخرى | 1.5A مجتمعة |
| جهد إشارة PWM | افتراضي 3.3V (يمكن التبديل إلى 5V عبر المقاومة) |
| درجة حرارة التشغيل | -25°C إلى +85°C |
الأبعاد الميكانيكية والوزن
| المكون | الأبعاد (مم) | الوزن (غ) |
|---|---|---|
| وحدة التحكم في الطيران | 38.8 x 31.8 x 16.8 | 31.3غ |
| اللوحة الأساسية القياسية | 52.4 x 102 x 16.7 | 72.5g |
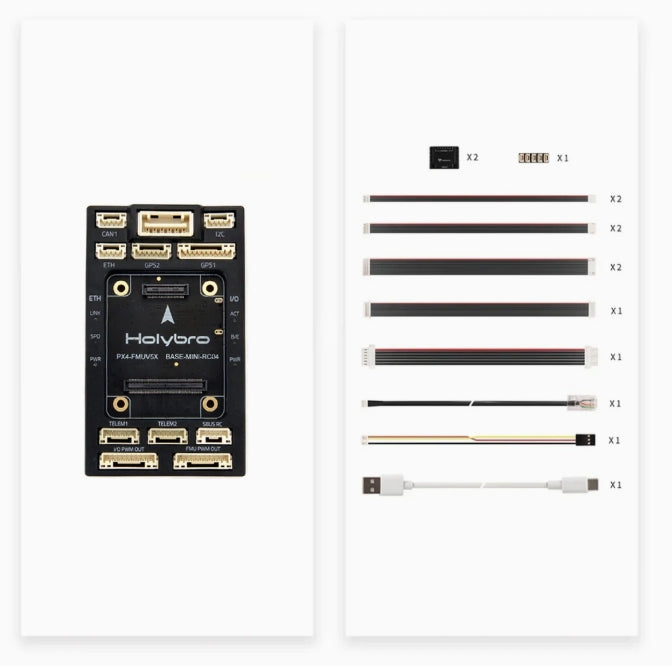
| قاعدة مصغرة | 43.4 × 72.8 × 14.2 | 26.5 جرام |
توافق البرنامج الثابت
-
PX4: مدعوم بالكامل من الإصدار 1.14.3 وما فوق
-
ArduPilot: مدعوم بالكامل من الإصدار 4.5.0 وما فوق
-
دعم فلاش البرنامج الثابت عبر Mission Planner أو QGroundControl
التطبيقات
مثالي للتكامل في:
-
الطائرات بدون طيار الصناعية
-
أنظمة الطائرات بدون طيار التجارية
-
طائرات VTOL
-
منصات البحث الأكاديمي
-
المهام متعددة المستشعرات وعالية الاعتمادية
التفاصيل

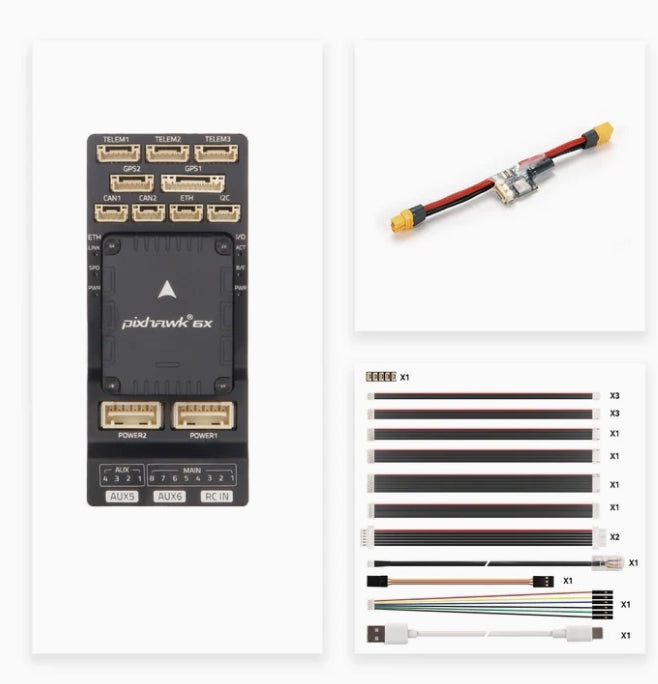
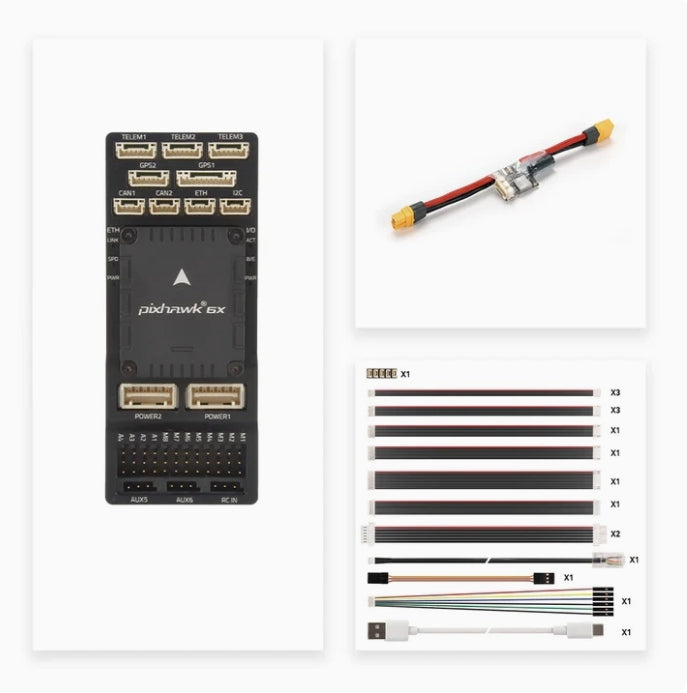
تقدم Pixhawk 6X تصميمًا أنحف مع نموذجين. يتميز برأس دبابيس محسّن لتحسين الاتصال والأداء، مما يجعله مثاليًا للتطبيقات المتقدمة. اختر النموذج المناسب لاحتياجاتك.
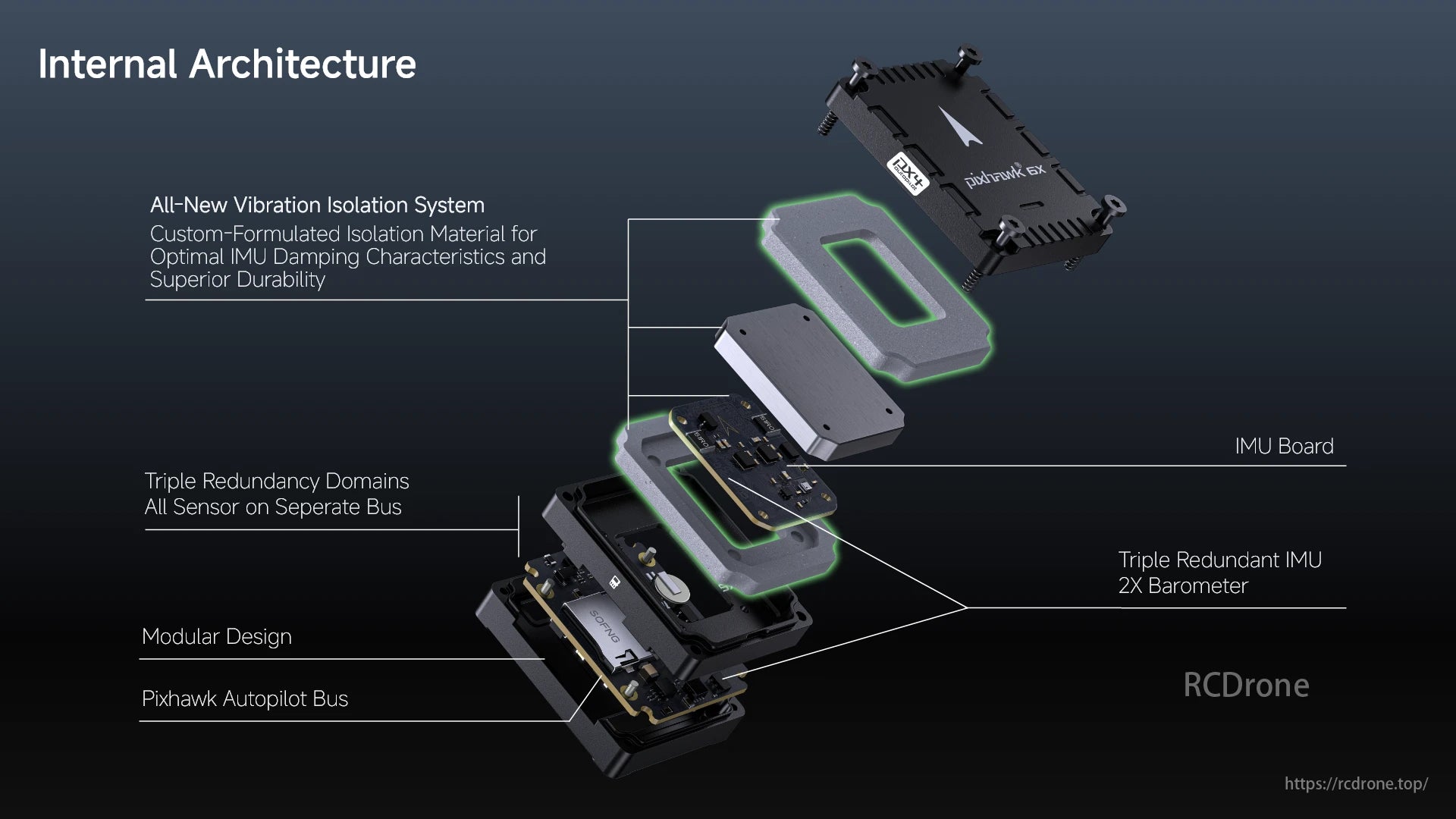
تقدم Holybro Pixhawk 6X عزل الاهتزاز، وتكرار ثلاثي، وتصميم معياري، وحافلة الطيار الآلي، ولوحة IMU، و2x بارومتر لأداء متقدم.
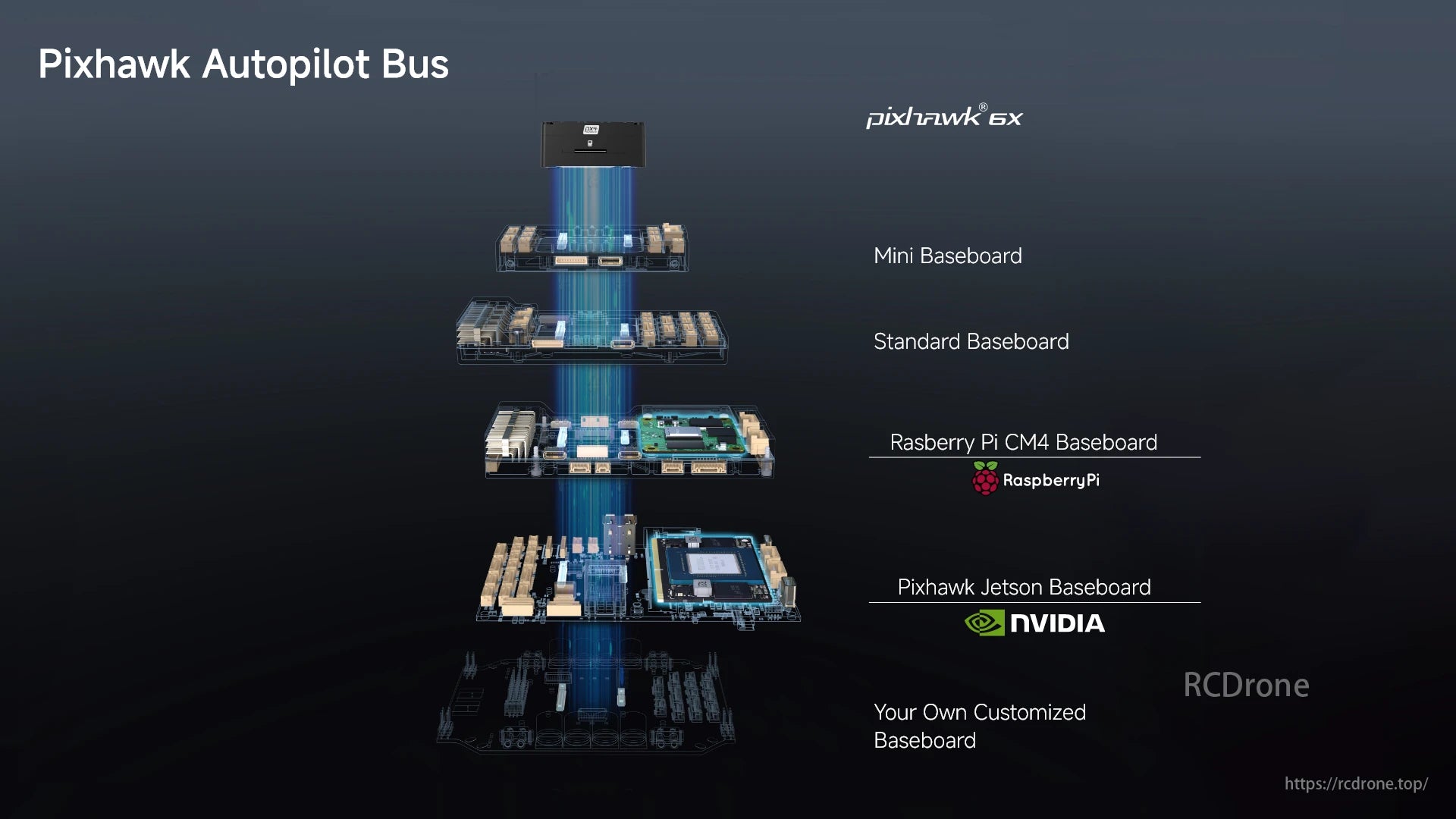
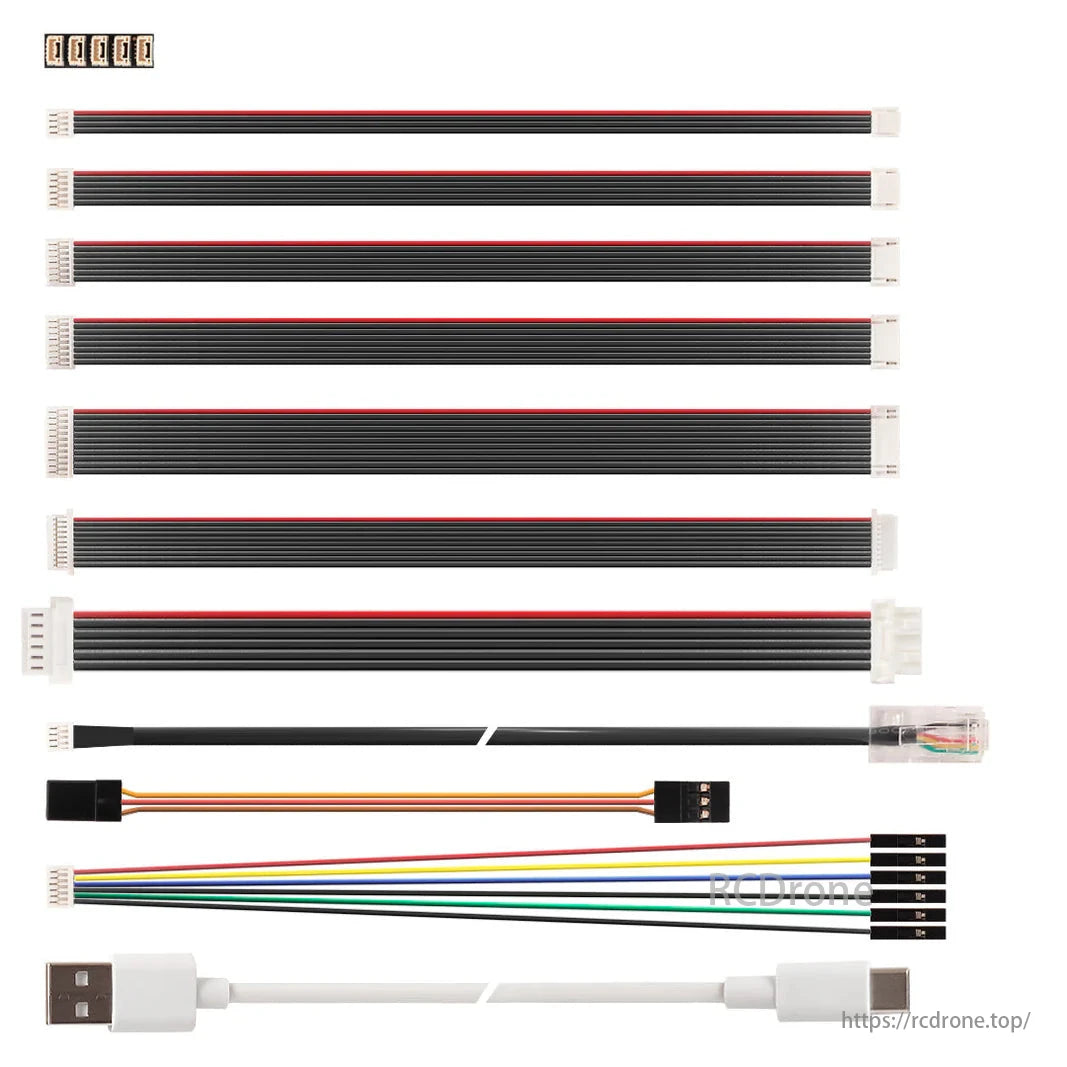
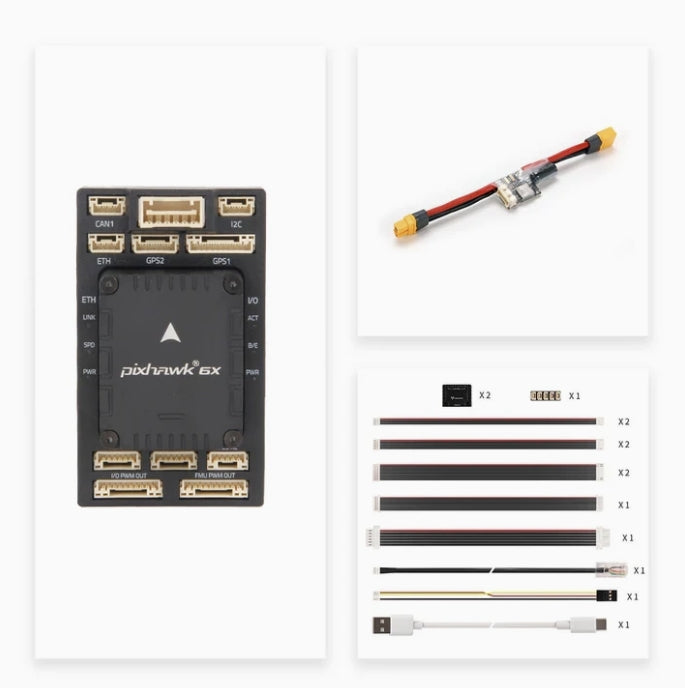
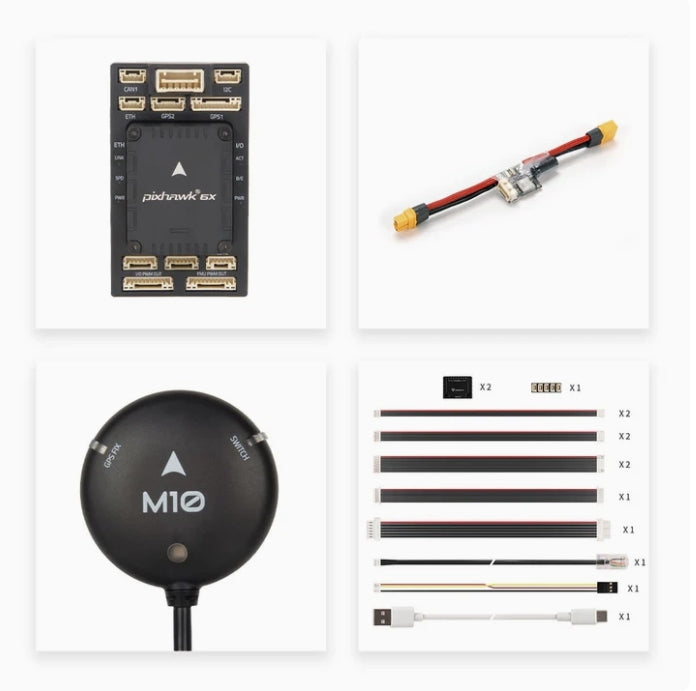
Pixhawk تشمل حافلة الطيار الآلي Pixhawk 6X، واللوحة الأساسية الصغيرة، واللوحة الأساسية القياسية، ولوحة Raspberry Pi CM4، ولوحة Jetson، وخيارات مخصصة.

تضمن مقاومات تعويض درجة الحرارة، وIMU وبارومتر احتياطي، وتقنيات استشعار متنوعة، ومواد عزل الدقة.

تتضمن حافلة الطيار الآلي Pixhawk، ومعالج STM H753 32 بت (480 ميجاهرتز)، وIMU Invensense ICM45686 مع تقنية BalancedGyro، وعنصر الأمان NXP EdgeLock SE050 مدمج في لوحة FMU.
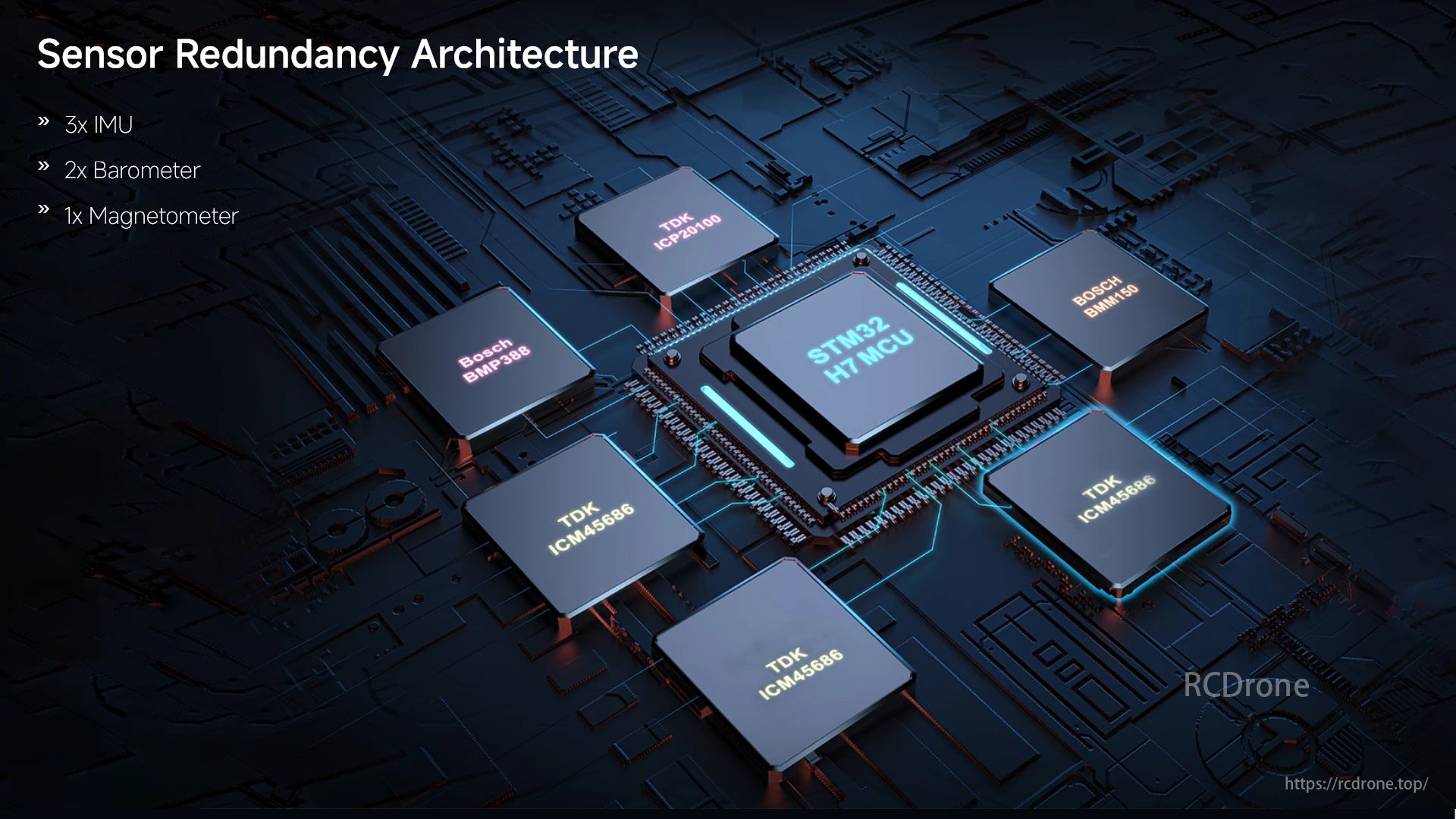
هيكل تكرار المستشعر مع 3x IMU، و2x بارومتر، و1x مغناطيسية.ميزات STM32 H7 MCU، مستشعرات TDK ICM-45686، Bosch BMP388، وBMM50 لأداء معزز.
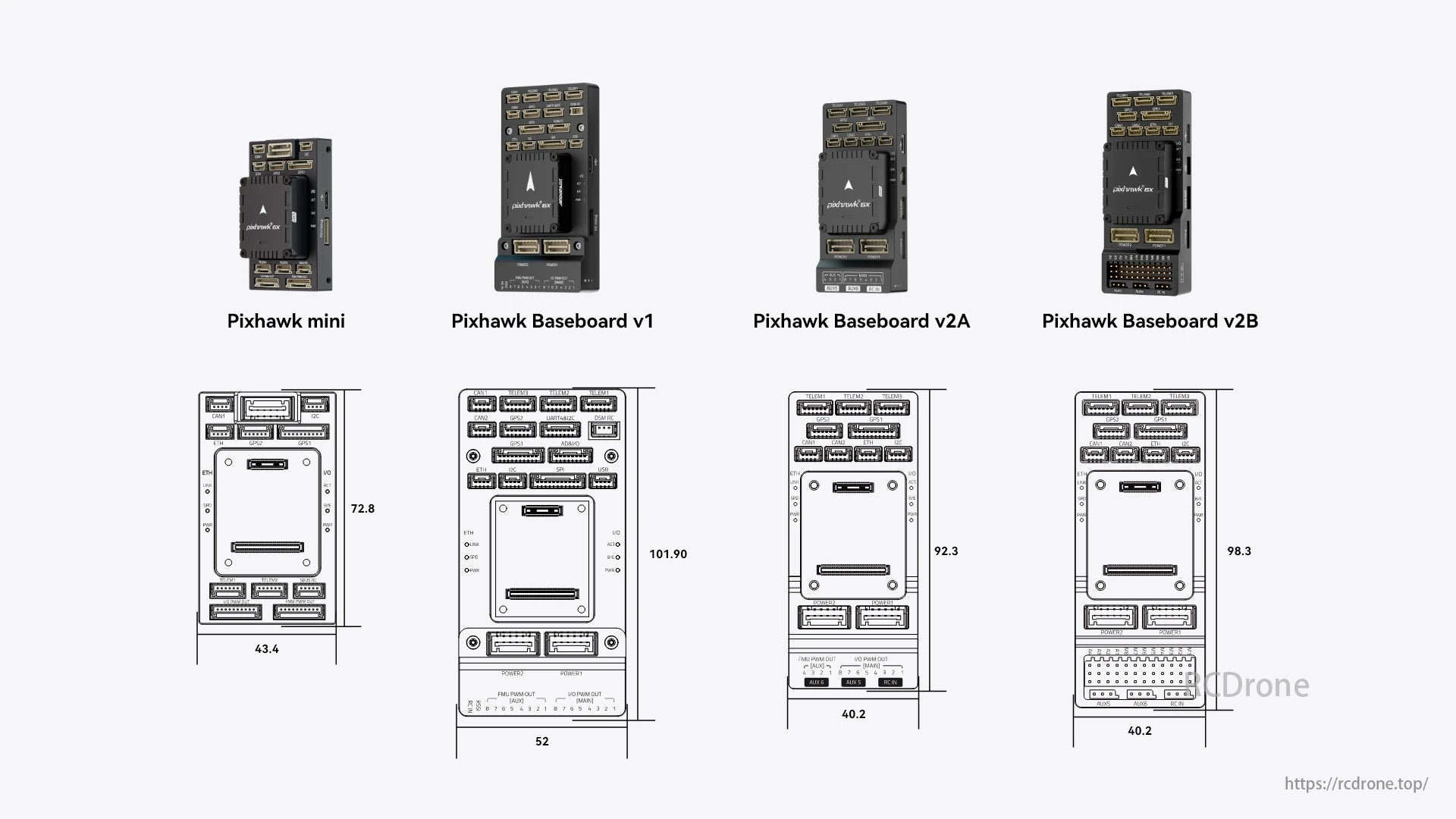
وحدات التحكم في الطيران Pixhawk mini، Baseboard v1، v2A، وv2B بأبعاد: 43.4x72.8، 52x101.90، 40.2x92.3، و40.2x98.3 على التوالي. توجد منافذ وموصلات متنوعة على كل نموذج.
Related Collections