Holybro Pixhawk 6X-RT - (إصدار المطور) وحدة التحكم في الطيران الآلي القياسية/المجموعة الصغيرة
Holybro Pixhawk 6X-RT - (إصدار المطور) وحدة التحكم في الطيران الآلي القياسية/المجموعة الصغيرة
HolyBro
تعذر تحميل توفر الالتقاط
نظرة عامة
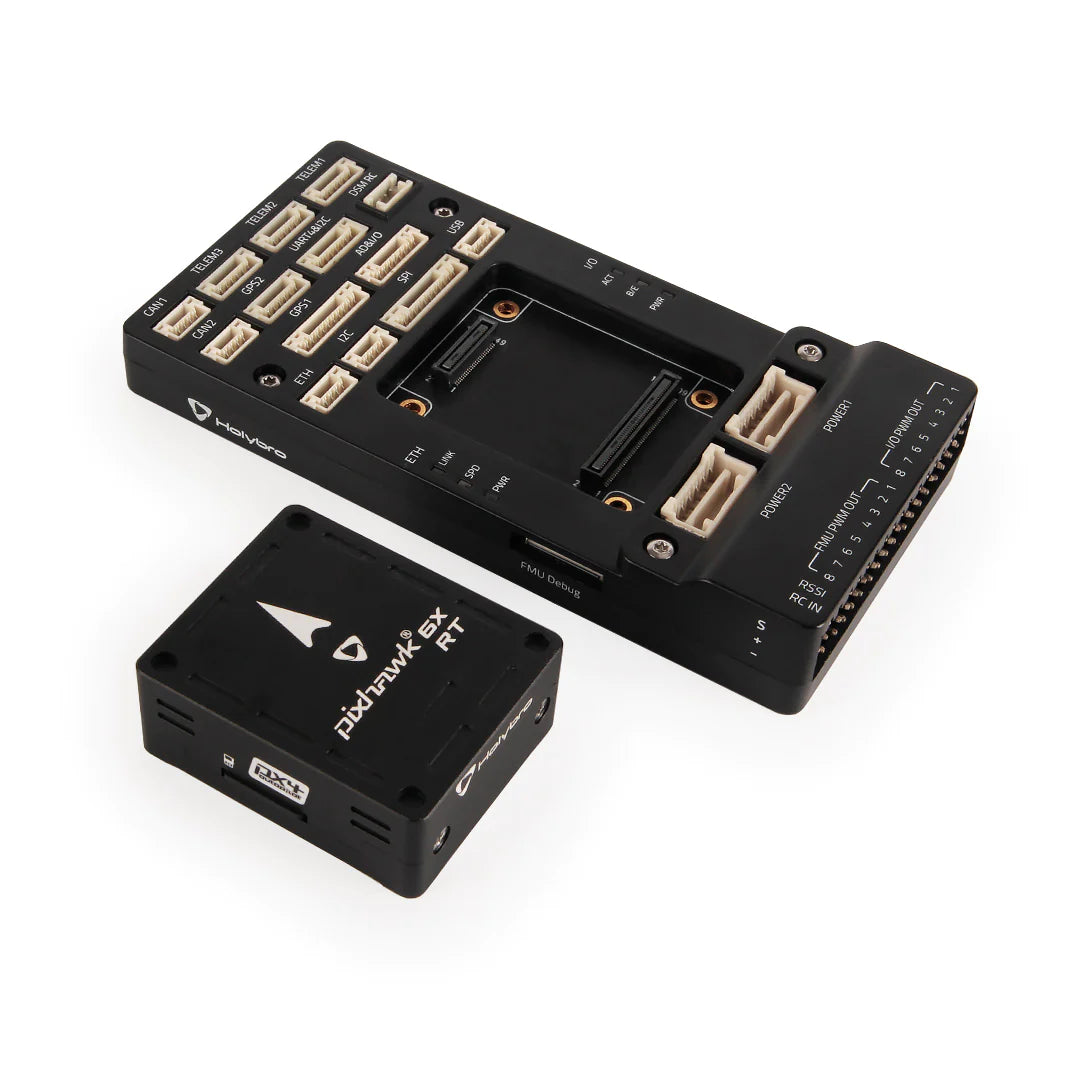
يعتمد Pixhawk 6X-RT على معيار Pixhawk® FMUv6X-RT المفتوح ومعيار Pixhawk® Autopilot Bus Standard. يأتي مزودًا بـ PX4 Autopilot® المثبت مسبقًا. داخل وحدة التحكم في الطيران Pixhawk 6X-RT، يمكنك العثور على جهاز i.MXRT1176 MCU، مقترنًا بتقنية الاستشعار من Bosch® وInvenSense®، مما يمنحك المرونة والموثوقية للتحكم في أي مركبة ذاتية القيادة.
أنا.يحتوي جهاز التحكم الدقيق MXRT1176 على Arm® Cortex-M7 بتردد 1 جيجا هرتز وCortex-M4 بتردد 400 ميجا هرتز. يحتوي على 2 ميجا بايت SRAM و 64 ميجا بايت Octal SPI Flash. بفضل قوة المعالجة المحدثة، يمكن للمطورين أن يكونوا أكثر إنتاجية وكفاءة في أعمال التطوير الخاصة بهم، مما يسمح بخوارزميات ونماذج معقدة.
يتضمن وحدات IMU عالية الأداء ومنخفضة الضوضاء مصممة لتحقيق استقرار أفضل، ويحتوي على وحدات IMU زائدة عن الحاجة ثلاثية ومقاييس ضغط مزدوجة زائدة عن الحاجة في حافلات منفصلة. عندما يكتشف الطيار الآلي فشل جهاز الاستشعار، يقوم النظام بالتبديل بسلاسة إلى جهاز آخر للحفاظ على موثوقية التحكم في الطيران. يعمل LDO المستقل على تشغيل كل مجموعة مستشعرات من خلال التحكم المستقل في الطاقة. نظام عزل الاهتزازات لتصفية الاهتزازات عالية التردد وتقليل الضوضاء لضمان قراءات دقيقة، مما يسمح للمركبات بالوصول إلى أداء طيران إجمالي أفضل. أصبح من الممكن الآن استخدام شريحة Microchip Ethernet PHY مدمجة عالية السرعة مع أجهزة كمبيوتر المهام عبر Ethernet.
يعد Pixhawk 6X-RT مثاليًا للمطورين في مختبرات أبحاث الشركات والشركات الناشئة والأكاديميين (الباحثين والأساتذة والطلاب) والتطبيقات التجارية. تتوافق وحدة التحكم في الطيران هذه مع أي لوحة أساسية تستخدم ناقل Pixhawk Autopilot، مثل Pixhawk Baseboard و Pixhawk Mini Baseboard و Pixhawk RPi CM4 Baseboard.
نقاط التصميم الرئيسية
- أداء عالي ثنائي النواة.معالج MXRT1176 بتردد Cortex-M7 بسرعة 1 جيجا هرتز – Cortex-M4 بسرعة 400 ميجا هرتز
- وحدة التحكم في الطيران المعيارية: نظام IMU وFMU ونظام أساسي منفصل متصل بواسطة موصل Pixhawk® Autopilot Bus ذو 100 سنًا و50 سنًا.
- التكرار: 3x مستشعرات IMU و2x مستشعرات البارومتر في حافلات منفصلة
- نطاقات تكرار ثلاثية: نطاقات مستشعر معزولة تمامًا باستخدام ناقلات منفصلة وتحكم منفصل في الطاقة
- نظام عزل الاهتزاز لتصفية الاهتزازات عالية التردد وتقليل الضوضاء لضمان قراءات دقيقة
- واجهة Ethernet لتكامل كمبيوتر المهمة عالي السرعة
- يتم التحكم في درجة حرارة وحدات IMU بواسطة مقاومات تسخين مدمجة، مما يسمح بدرجة حرارة العمل المثالية لوحدات IMU
- العنصر الآمن للأجهزة NXP EdgeLock SE051 امتداد لمجموعة العناصر الآمنة الموثوق بها على نطاق واسع EdgeLock SE050 Plug & Trust عائلة العناصر الآمنة، ويدعم تحديثات التطبيق الصغير في الميدان ويقدم أمان مثبت ومعتمد لـ CC EAL 6+، مع AVA_VAN.5 حتى مستوى نظام التشغيل، لتوفير حماية قوية ضد أحدث سيناريوهات الهجوم. هg لتخزين معرف المشغل بشكل آمن
ملاحظة:
- إصدار المطورين هذا مخصص للمستخدمين الأوائل بينما نواصل تجميع ساعات اختبار الطيران
- وحدة التحكم في الطيران هذه مدعومة حاليًا في PX4 Flight Stack فقط. (هدف البرنامج الثابت: FMUv6xrt). وهو غير مدعوم في Ardupilot.
- تستخدم وحدة التحكم في الطيران هذه وحدة طاقة رقمية (مثل Pixhawk 6X، ويمكن العثور على القائمة الكاملة هنا) مخطط مقارنة وحدة الطاقة
المواصفات
-
MCU: أنا.MXRT1176
-
Cortex-M7 @ 1 جيجا هرتز
-
Cortex-M4 @ 400 ميجا هرتز
-
2 ميجابايت من ذاكرة الوصول العشوائي
-
فلاش ثماني SPI سعة 64 ميجابايت
-
معالج الإدخال والإخراج: STM32F103
-
32 بت Arm® Cortex®-M3، 72 ميجا هرتز، 64 كيلو بايت SRAM
-
أجهزة الاستشعار الموجودة على متن الطائرة
-
التسارع/الجيروسكوب: BMI088
-
تسارع/دوران: ICM-42670-P
-
تسارع/دوران: ICM-42686-P
-
ماج: BMM150
-
البارومتر: 2x BMP388
- عنصر آمن للأجهزة
- NXP EdgeLock SE051C2
- واجهة SDHC
- 12-قناة PWM
- 8x UART
- 4x I2C
- 6x سبي
- 3x CAN-FD
- RMII 100M إيثرنت
- يو إس بي
- تمكين البرامج مفتوحة المصدر
- الطيار الآلي PX4
- نوتكس رتوس
- زفير RTOS
المجموعة القياسية SKU20257/ المجموعة الصغيرة SKU258 تتضمن:
-
وحدة التحكم في الطيران Pixhawk 6X-RT
-
قاعدة Pixhawk القياسية/قاعدة Pixhawk الصغيرة
- PM02D وحدة الطاقة ذات الجهد العالي
-
مجموعة الكابلات
الرابط المرجعي:
- تعليمات وميض البرامج الثابتة (Github)
- PX4 على NXP IMXRT1176 MCU بسرعة 1 جيجاهرتز - شرائح العرض التقديمي بواسطة NXP
- ط.MX RT1176 – صفحة المنتج 1 جيجا هرتز Crossover MCU مع Arm® Cortex® Cores
- EdgeLock® SE051: حل أمان إنترنت الأشياء الذي أثبت كفاءته وسهل الاستخدام مع دعم قابلية التحديث والتطبيقات المخصصة
Related Collections