حزمة Holybro Pixhawk Jetson Baseboard مع 6X / 6X Pro وNVIDIA Jetson
حزمة Holybro Pixhawk Jetson Baseboard مع 6X / 6X Pro وNVIDIA Jetson
HolyBro
تعذر تحميل توفر الالتقاط
ملخص
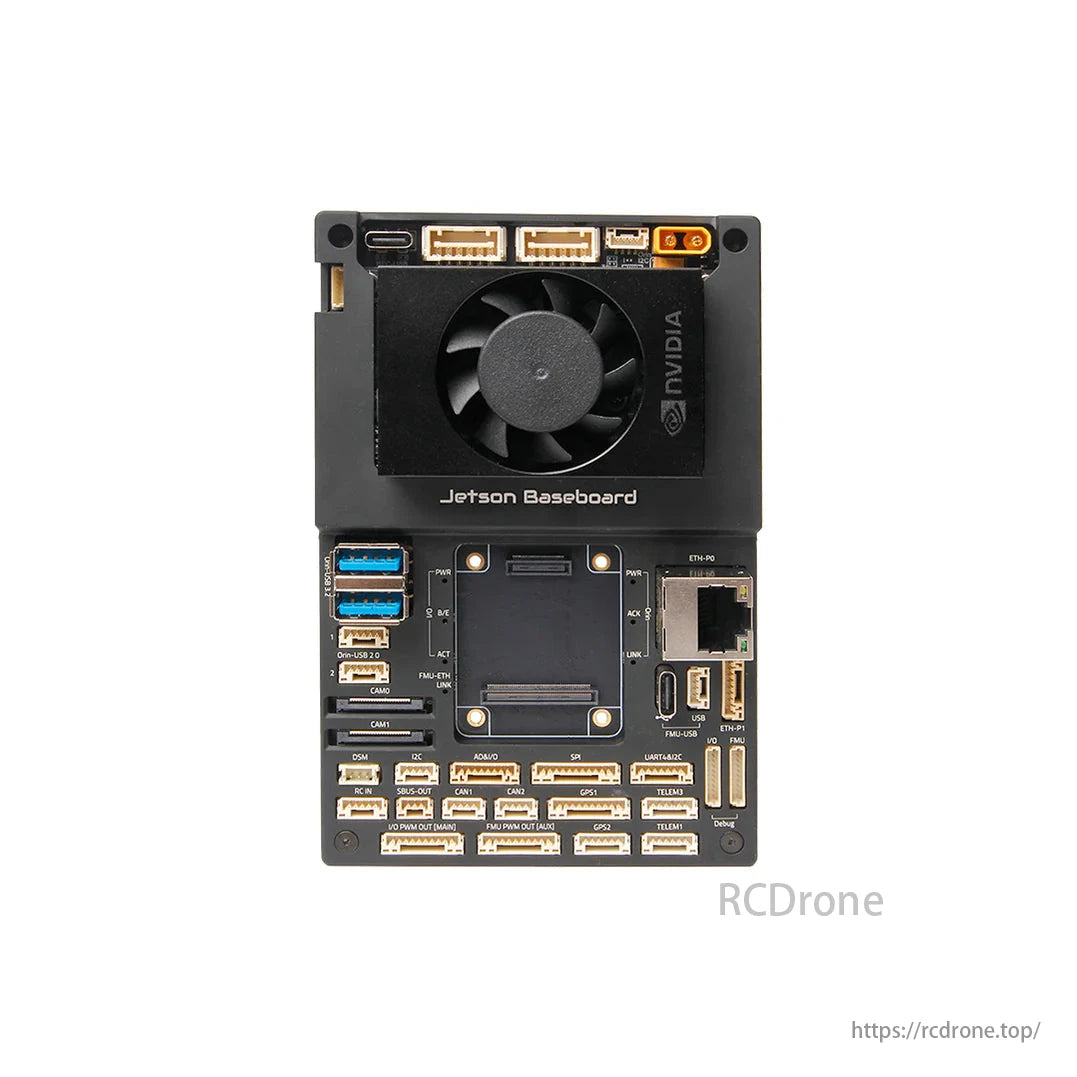
ال لوحة قاعدة هوليبرو بيكهاوك جيتسون تم تصميمه على أساس مواصفات Pixhawk Autopilot Bus (PAB) مفتوحة المصدر ويتكامل بسلاسة مع لوحة الناقل NVIDIA Jetson Orin NX/Nano. ال عامل شكل PAB يسمح بالتوافق مع أي وحدة تحكم طيران PAB، بما في ذلك بيكس هوك 6Xتجمع هذه اللوحة بين القوة الحسابية لـ إنفيديا جيتسون مع قدرات التحكم في الطيران بيكهوكمما يجعلها مثالية للتطبيقات المستقلة المتقدمة.
الميزات الرئيسية
-
النظام الموحد: يجمع بيكهوك و إنفيديا جيتسون في لوحة واحدة.
-
اتصال سلس: يتواصل جيتسون وبيكسهوك عبر مفتاح UART وCAN وEthernet.
-
التوافق الواسع: يدعم جيتسون أورين NX وأورين نانو.
-
التوسعة عالية السرعة: سمات 2x فتحات مفاتيح M.2 لـ WiFi/Bluetooth وNVMe SSD.
-
تكامل Pixhawk 6X: مجهزة بـ أجهزة استشعار ICM-45686 لتحسين التحكم في الطيران.
المعالجات والمستشعرات
معالج FMU:
-
إس تي إم 32 إتش 753
-
معالج ARM Cortex-M7 ذو 32 بت، بتردد 480 ميجاهرتز
-
ذاكرة فلاش 2 ميجا بايت، وذاكرة عشوائية 1 ميجا بايت
معالج الإدخال/الإخراج:
-
إس تي إم 32 إف 103
-
معالج ARM Cortex-M3 ذو 32 بت، بتردد 72 ميجاهرتز
-
64 كيلوبايت SRAM
أجهزة الاستشعار الموجودة على متن السيارة (Rev8)
-
مقياس التسارع/الجيروسكوب: 3x اي سي ام-45686 (مع تقنية BalancedGyro™)
-
البارومتر: ICP20100 و BMP388
-
مقياس المغناطيسية: بي ام ام 150
المنافذ والاتصال باللوحة الأساسية
موصلات جيتسون
-
2 منافذ جيجابت إيثرنت (متصل بـ Jetson & Autopilot عبر مفتاح إيثرنت RTL8367S)
-
مدخلان للكاميرا MIPI CSI (4 حارات لكل منهما، كاميرا Raspberry Pi FFC ذات 22 سنًا)
-
2 منفذ مضيف USB 3.0 (USB-A، حد التيار 5A)
-
2 × يو اس بي 2.0 منافذ مضيفة (5 دبابيس JST-GH)
-
USB 2.0 لتصحيح الأخطاء (يو اس بي-سي)
-
مخرج HDMI صغير
-
2x فتحات M.2:
-
المفتاح M (2242) لـ NVMe SSD (PCIEx4)
-
المفتاح E (2230) لـ WiFi/BT (PCIEx2، UART، USB، I2S)
-
-
منفذ CAN (متصل بـ الطيار الآلي CAN2، 4 دبابيس JST-GH)
-
منافذ SPI وI2C وI2S وUART (موصلات JST-GH المتنوعة)
-
منفذ طاقة المروحة
-
مدخلات الطاقة: موصل XT30، 7-21 فولت (3S-4S)
-
UBEC 12A (3-14S) يوصى به للتطبيقات التي تزيد عن 4S
موصلات الطيار الآلي
-
واجهة حافلة Pixhawk Autopilot: 100 دبوس و 50 دبوس هيروس DF40
-
مدخلات وحدة الطاقة الرقمية الزائدة
-
دعم مراقبة الطاقة I2C
-
منافذ نظام تحديد المواقع العالمي (GPS) ومفاتيح الأمان: موصل JST-GH ذو 10 دبابيس و6 دبابيس
-
2 منفذ CAN (4 دبابيس JST-GH)
-
3 منافذ قياس عن بعد (JST-GH، واحد متصل بـ UART1 الخاص بـ Jetson)
-
16 مخرج PWM (2x 10-Pin JST-GH)
-
USB 2.0 (USB-C و4 دبابيس JST-GH)
-
مدخل DSM (3 دبابيس JST-ZH، درجة 1.5 مم)
-
مدخل RC (PPM/SBUS، 5 دبابيس JST-GH)
-
منفذ SPI لناقل الاستشعار الخارجي (SPI5، 11 دبوسًا JST-GH)
-
2x منافذ تصحيح (FMU وIO، 10 دبابيس JST-SH)
متطلبات الطاقة
-
جهد الإدخال: 7-21 فولت (3S-4S) عبر موصل XT30
-
الحد الأدنى لمتطلبات الطاقة: 8 فولت/3 أمبير (يختلف حسب الأجهزة الطرفية)
-
يدعم UBEC خارجيًا 12A (3-14S) لتطبيقات التكرار والجهد العالي
-
حماية مدمجة من الجهد الزائد
الأبعاد والوزن
-
حجم اللوحة: 126 × 80 × 38 مم (بدون Jetson و Flight Controller)
-
وزن: 203.2 جرام (بما في ذلك Jetson، والمبدد الحراري، ووحدة التحكم في الطيران، وSSD، ووحدة Wi-Fi)
مواصفات UBEC-12A
-
جهد الإدخال: 3~14 ثانية (XT30)
-
جهد الخرج: 6.0 فولت/7.2 فولت/8.0 فولت/9.2 فولت (يوصى باستخدام 7.2 فولت لـ Jetson)
-
تيار الإخراج المستمر: 12أ
-
تيار الإخراج المتفجر: 24أ
-
مقاس: 48 × 33.6 × 16.3 ملم
-
وزن: 47.8 جرام
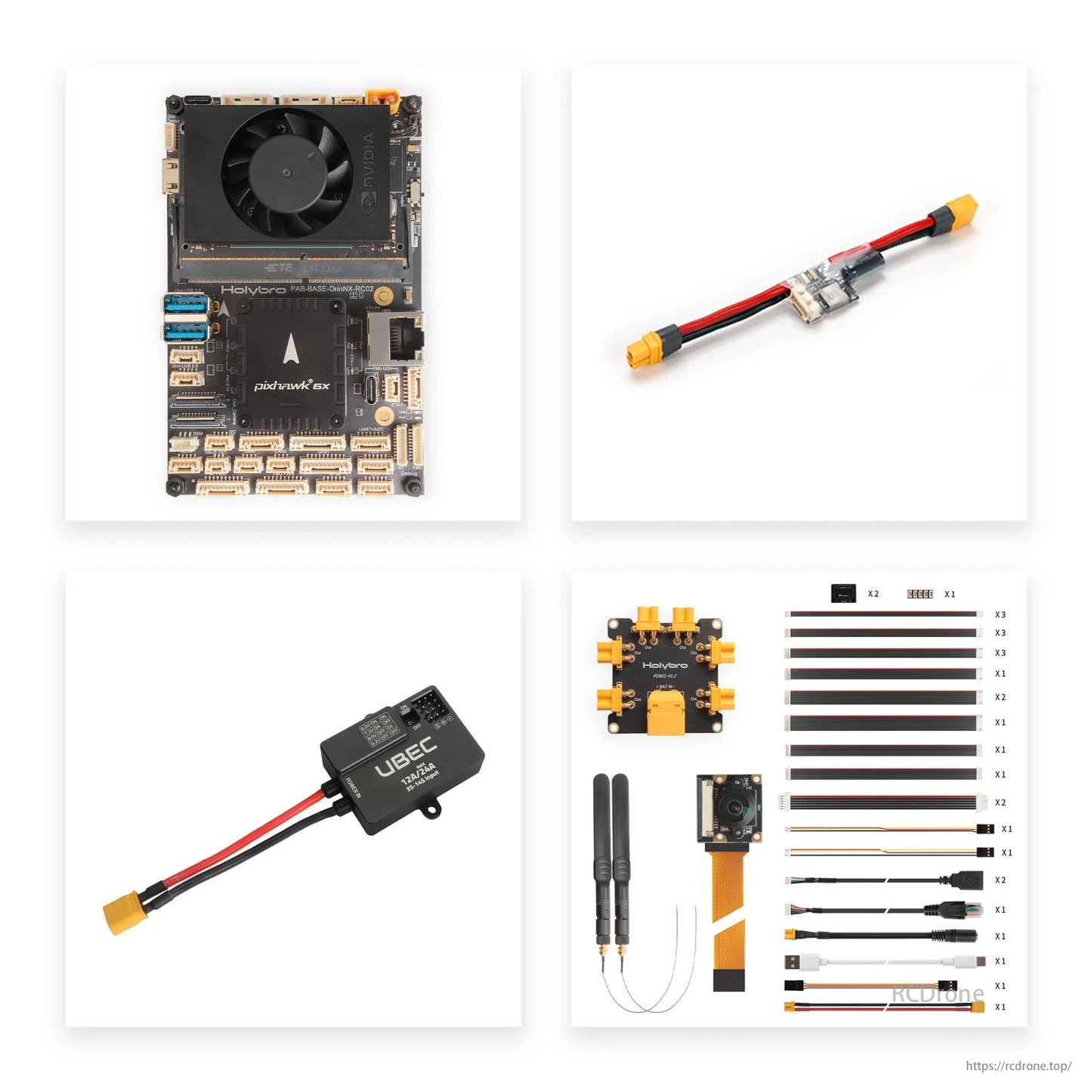
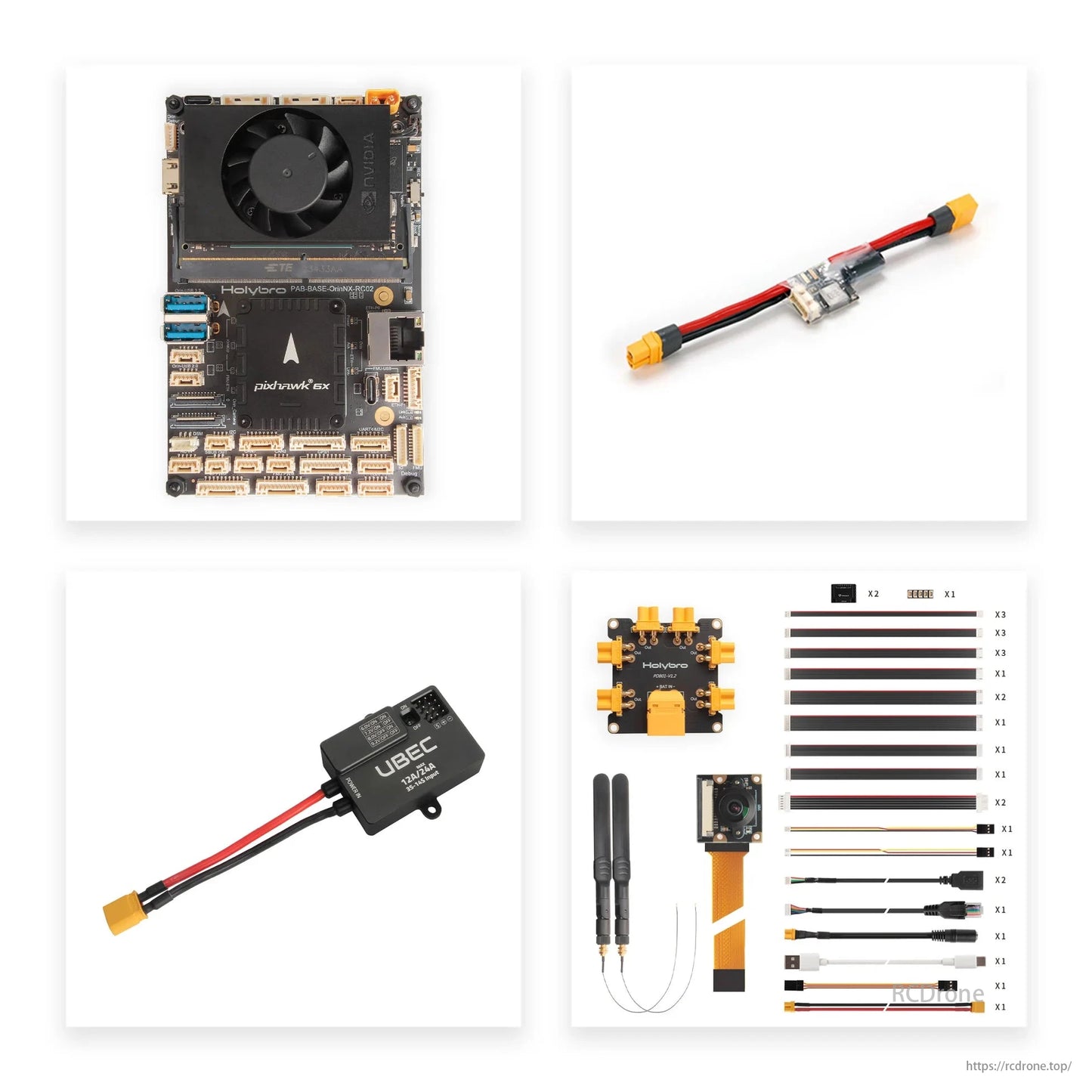
محتويات الحزمة
حزمة Pixhawk 6X
-
وحدة التحكم في الطيران Pixhawk 6X (ICM-45686)
-
لوح قاعدة Pixhawk Jetson Orin
-
بطاقة Nvidia Orin NX (ذاكرة وصول عشوائي سعتها 16 جيجابايت) / Orin Nano (ذاكرة وصول عشوائي سعتها 4 جيجابايت) مع مشتت حراري ومروحة
-
SSD: سامسونج PM9B1 PCIe 4.0 NVMe 512 جيجابايت
-
وحدة واي فاي وبلوتوث: إنتل 8265NGW نطاق مزدوج AC / Realtek RTL8B22CE
-
آلة تصوير: اي ام اكس 219-200
-
وحدة الطاقة PM02D
-
UBEC 12A (3-14S)
-
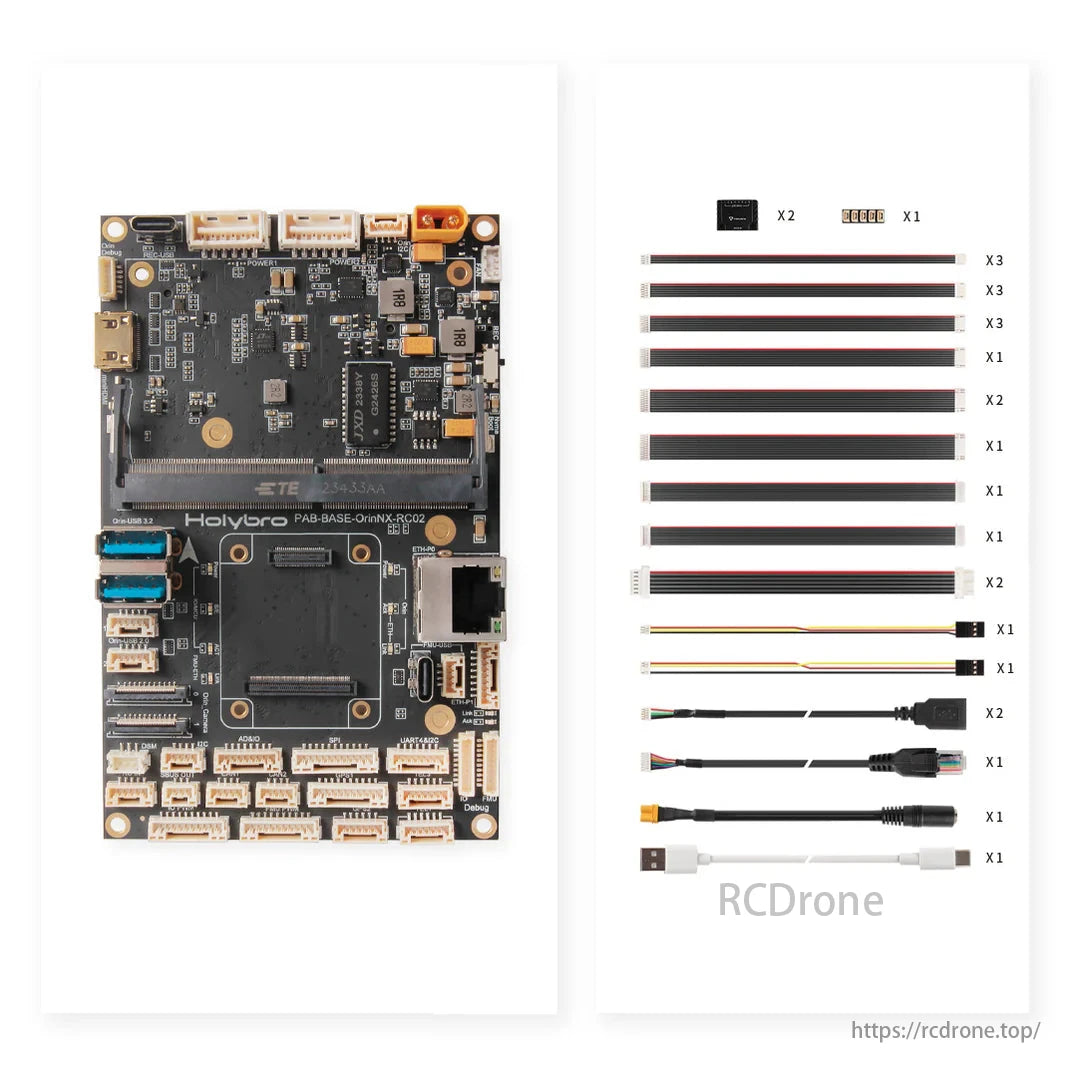
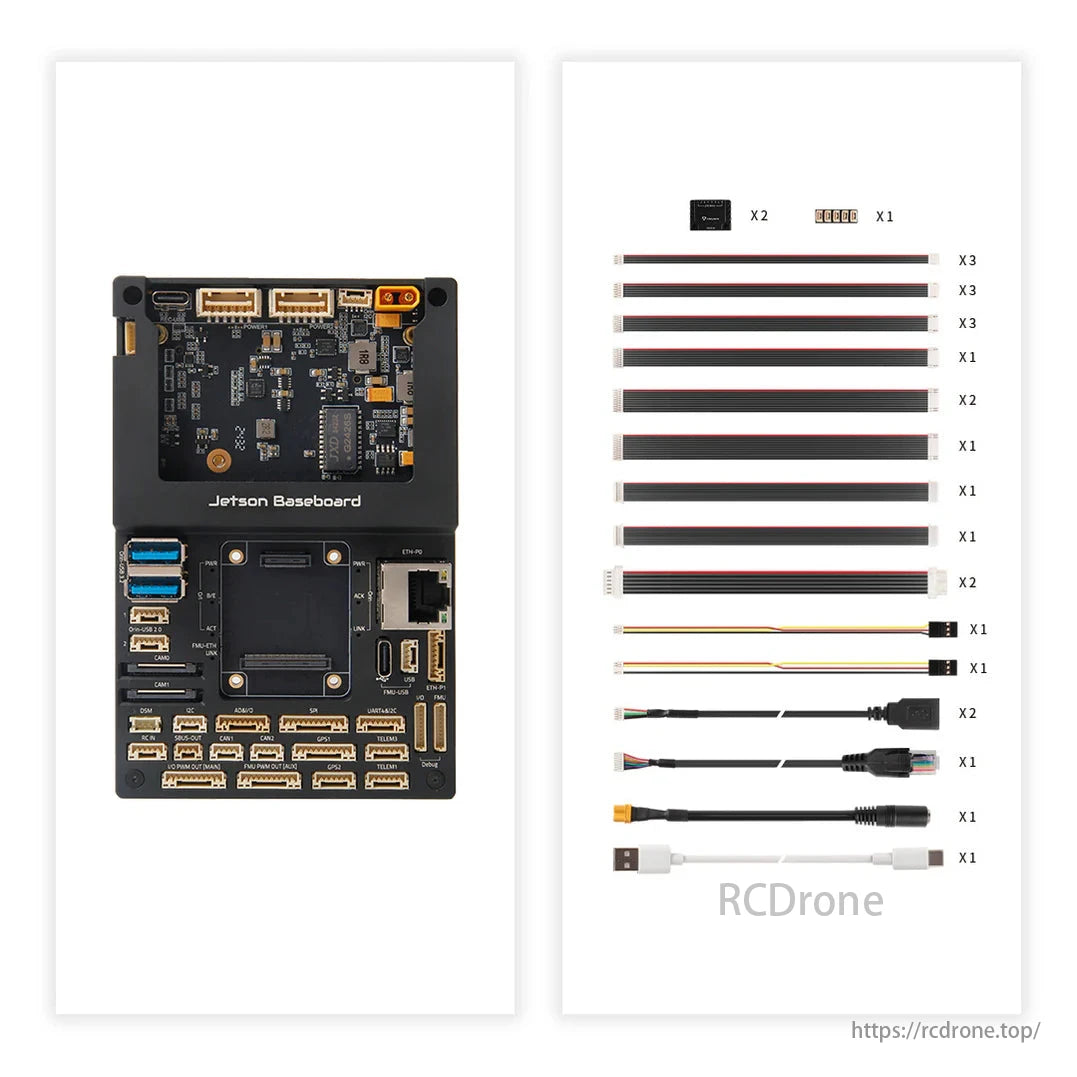
مجموعة لوحة PDB والكابلات
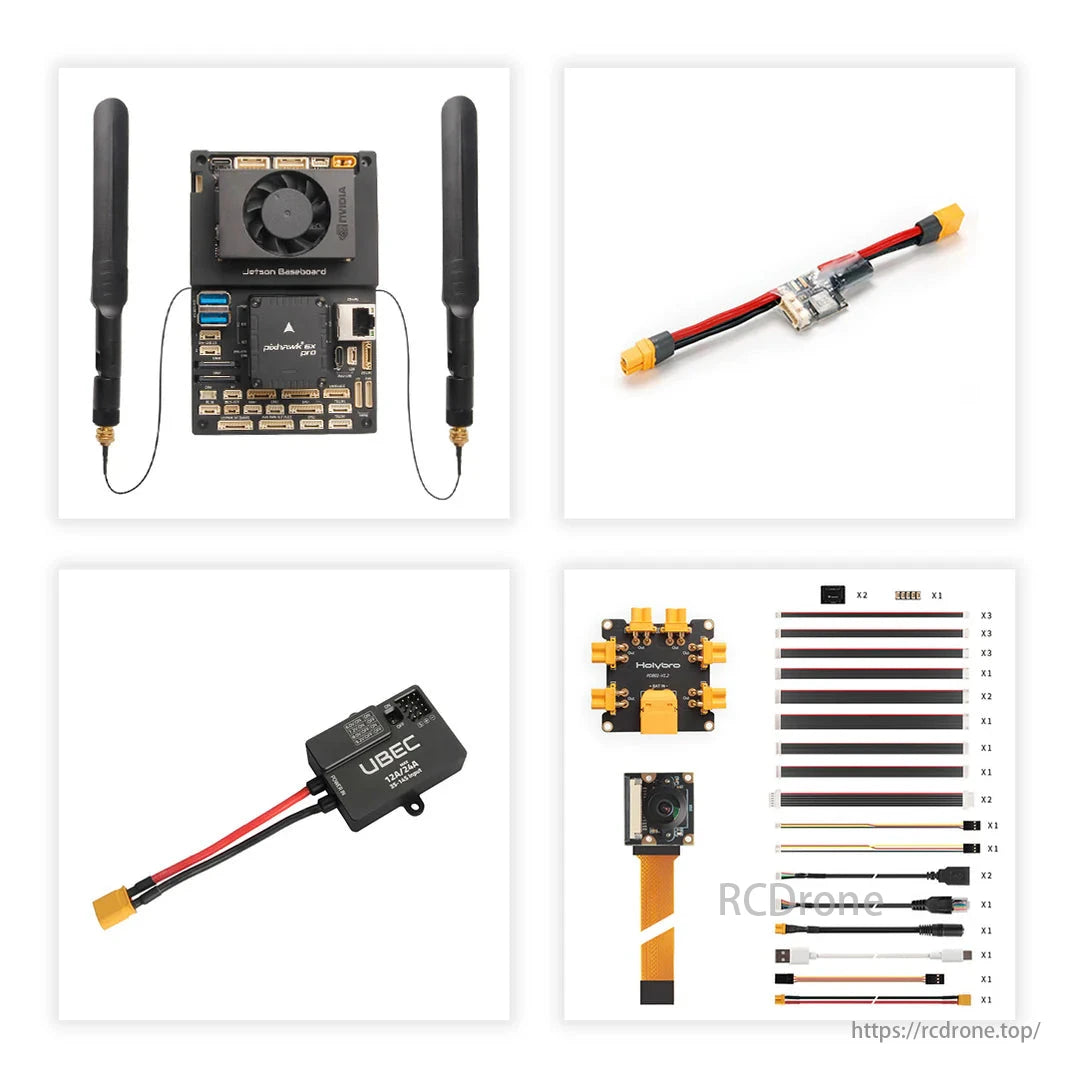
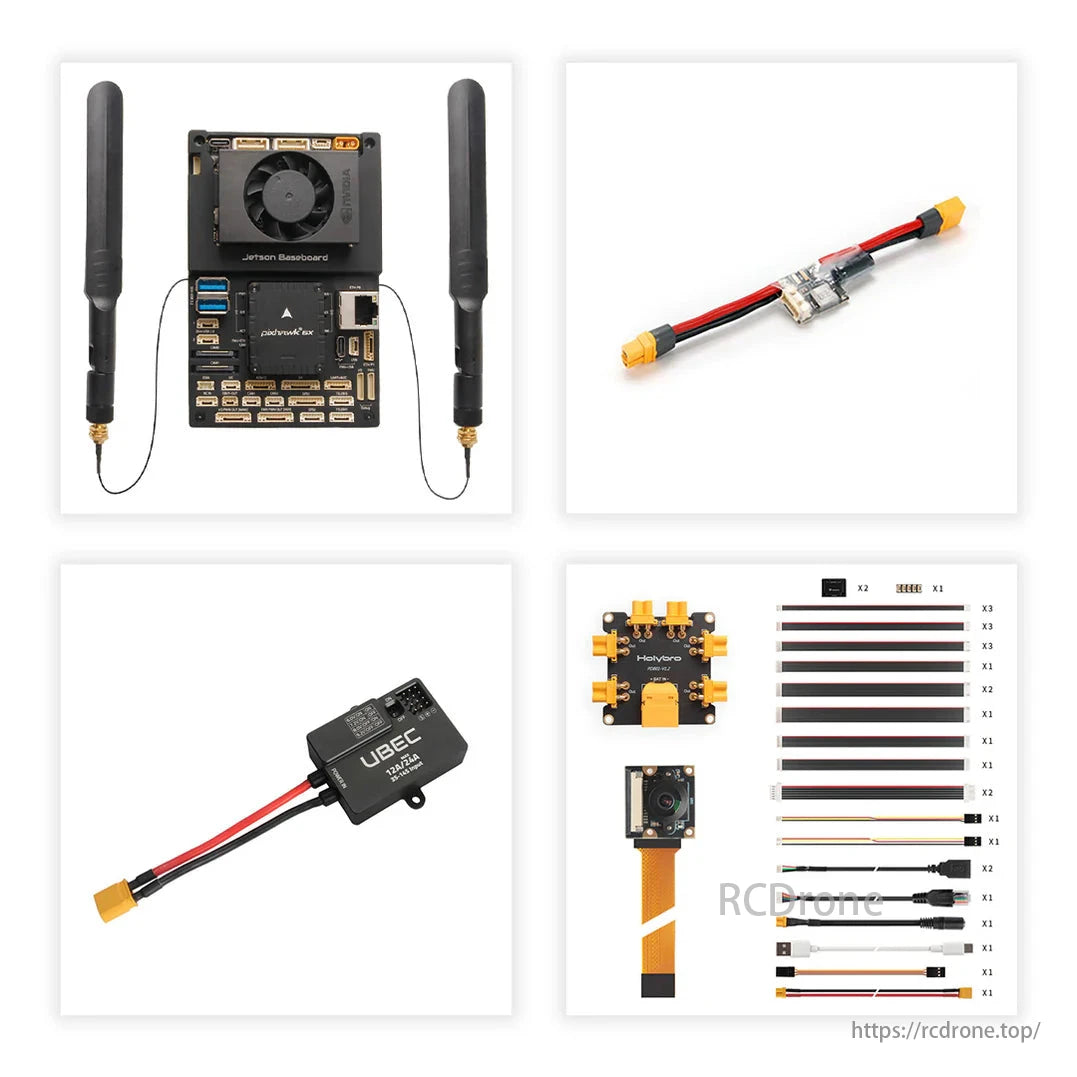
مجموعة Pixhawk 6X Pro
-
وحدة التحكم في الطيران Pixhawk 6X Pro
-
Pixhawk Jetson Orin Baseboard (مع أو بدون علبة)
-
بطاقة Nvidia Orin NX (ذاكرة وصول عشوائي سعتها 16 جيجابايت) / Orin Nano (ذاكرة وصول عشوائي سعتها 4 جيجابايت) مع مشتت حراري ومروحة
-
SSD، وحدة Wi-Fi/Bluetooth، كاميرا، وحدة طاقة PM02D، UBEC 12A، لوحة PDB، مجموعة كابلات
لوح القاعدة جيتسون فقط
-
Pixhawk Jetson Orin Baseboard (مع أو بدون علبة)
-
مجموعة الكابلات
روابط مرجعية
بيانات تسجيل الدخول الافتراضية لـ Jetson Orin:
-
بطاقة تعريف:
يا إلهي -
كلمة المرور:
123
تفاصيل




تم دمج Pixhawk و Nvidia Jetson في لوحة واحدة.

تم توصيل Nvidia jetson عبر علبة UART ومفتاح Ethernet باستخدام موصل RJ45 لأنظمة الطيار الآلي
مواصفات Pixhawk Autopilot Bus (PAB) مفتوحة المصدر

نظام موصل Jetson SoDIMM متوافق تمامًا مع Jetson Orin NX/Nano

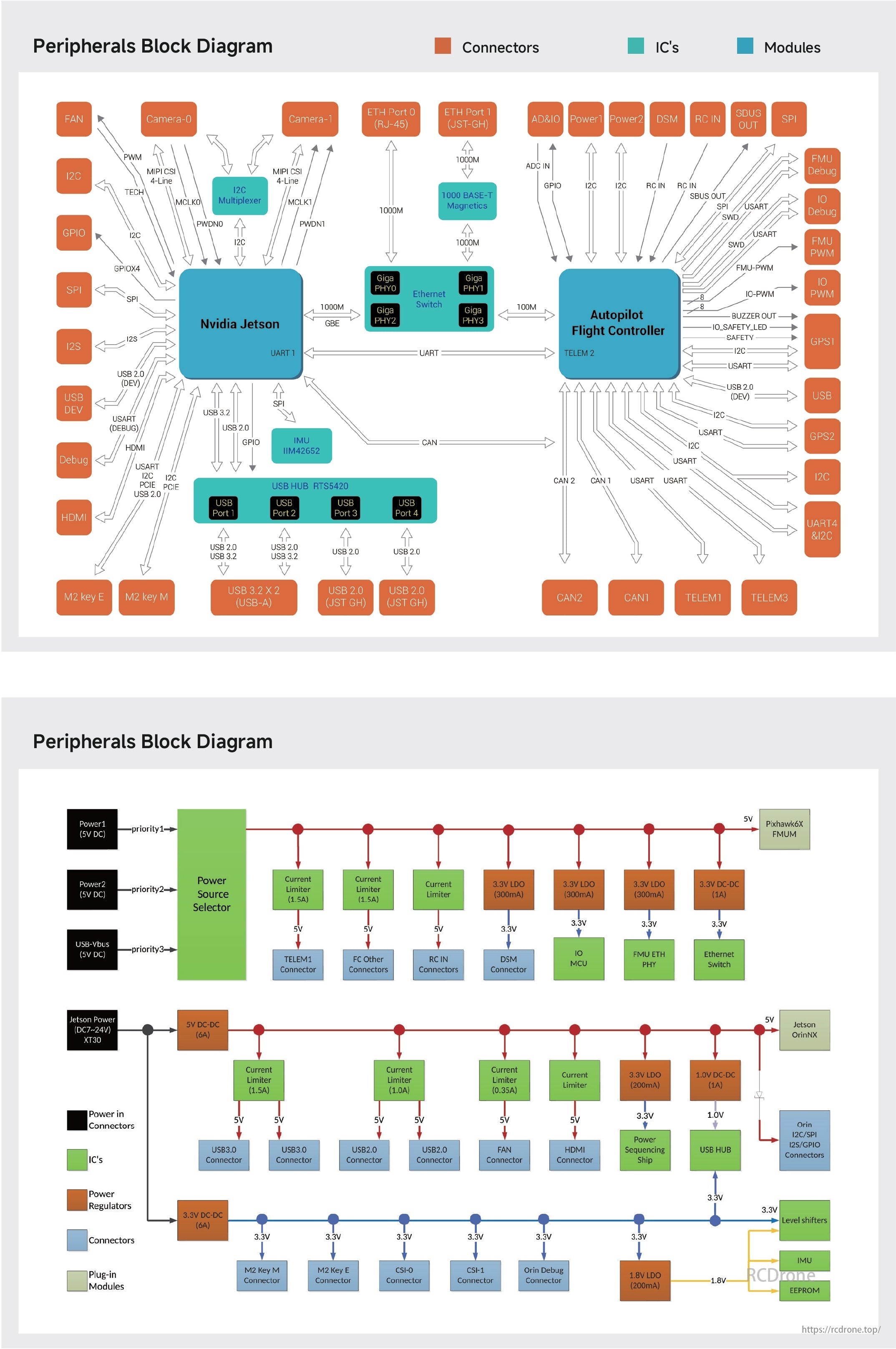
تصور الصورة مخططًا لمكونات طرفية لنظام مضمن، يضم مكونات مثل Nvidia Jetson وAutopilot Flight Controller. ويشمل العديد من الموصلات والدوائر المتكاملة والوحدات النمطية مثل منافذ USB ومفاتيح Ethernet ومنظمات الطاقة، مما يوضح توصيلاتها وتدفق البيانات.
مخطط الأسلاك المرجعي

يوضح الرسم البياني نظامي توزيع الطاقة لوحدة Jetson باستخدام بطارية واحدة. يستخدم الرسم البياني الأيسر وحدة طاقة PM02D ولوحة توزيع الطاقة، بينما يتضمن الرسم البياني الأيمن وحدة UBEC خارجية للبطاريات التي تزيد عن 4S.يضمن كلا الإعدادين تنظيم الجهد المناسب لـ Jetson وPixhawk Power.
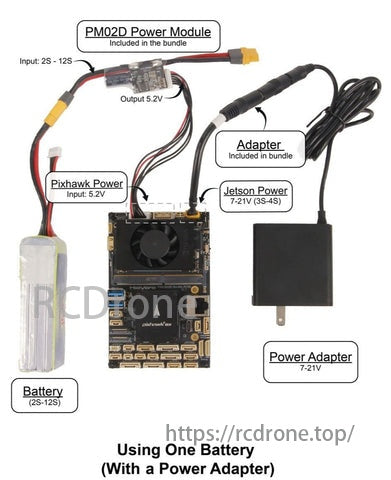
تقوم وحدة الطاقة PM02D بربط البطارية بجهاز Pixhawk وJetson، باستخدام بطارية واحدة مع محول طاقة لإدخال 7-21 فولت.
Related Collections