مجموعة تطوير Holybro X500 v2 PX4 - مجموعة طائرات بدون طيار من ألياف الكربون مع Holybro Pixhawk 6C / 6X وM8N GPS وراديو القياس عن بعد SiK وطائرة بدون طيار صناعية
مجموعة تطوير Holybro X500 v2 PX4 - مجموعة طائرات بدون طيار من ألياف الكربون مع Holybro Pixhawk 6C / 6X وM8N GPS وراديو القياس عن بعد SiK وطائرة بدون طيار صناعية
HolyBro
سعر عادي
$769.00 USD
سعر عادي
سعر البيع
$769.00 USD
سعر الوحدة
per
Taxes included.
الشحن محسوب عند السداد.
تعذر تحميل توفر الالتقاط
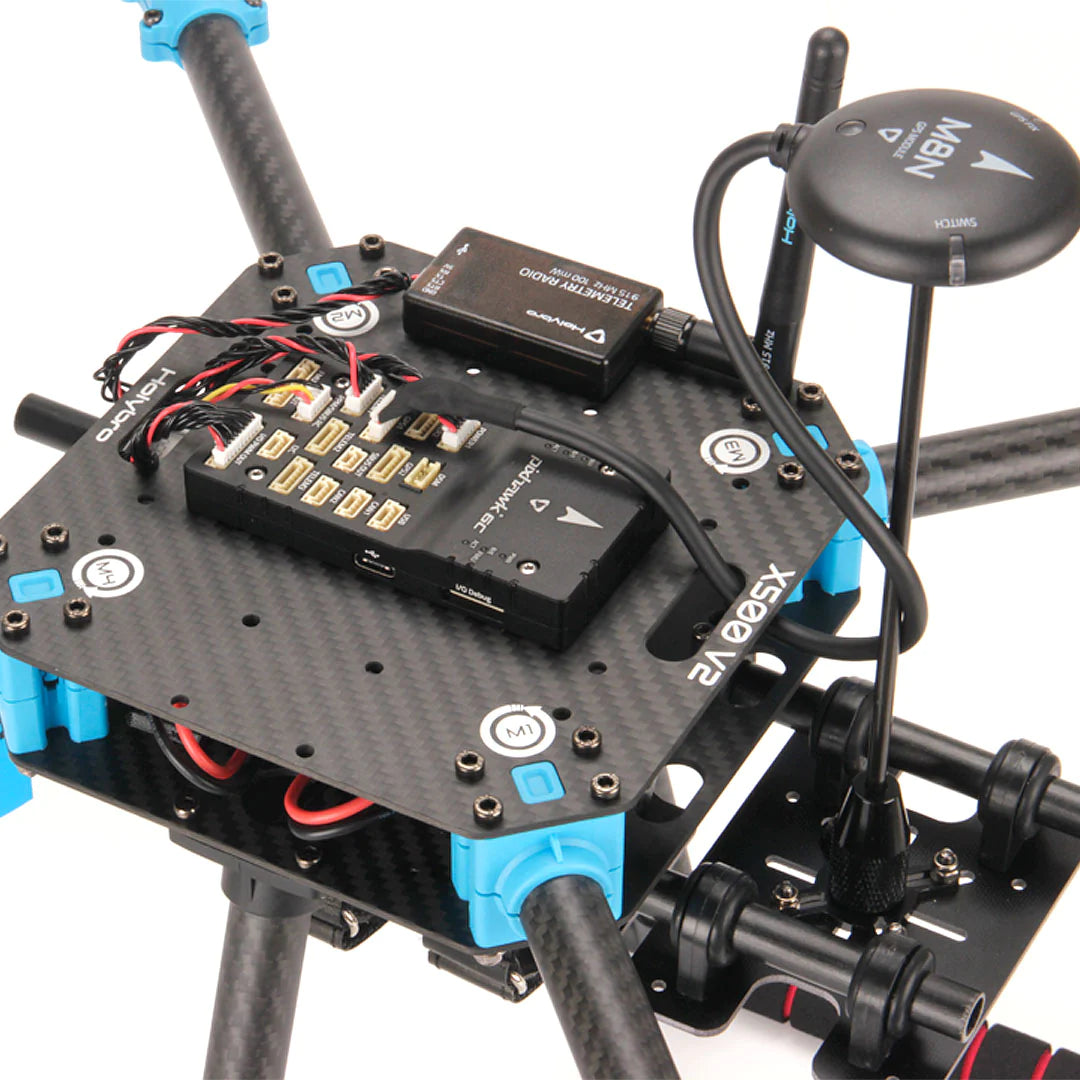
مجموعة تطوير PX4 - X500 v2 هي مجموعة طائرات بدون طيار للتطوير الاحترافي من ألياف الكربون ميسورة التكلفة وخفيفة الوزن وقوية مع أحدث إصدار من Holybro Pixhawk 6C أو Pixhawk 6X جهاز التحكم في الطيران الآلي، M8N GPS ، وراديو القياس عن بعد SiK التوصيل والتشغيل. إنه سريع وسهل التجميع (حوالي 30 دقيقة) دون الحاجة إلى اللحام، لذلك يمكنك قضاء المزيد من الوقت في الطيران والتطوير بدلاً من ذلك. يأتي مزودًا بمجموعة إطارات X500 V2 والمحركات ووحدات ESC ولوحات توزيع الطاقة والمراوح الإضافية. يتم تثبيت أذرع الطائرة بدون طيار مسبقًا بمحركات ووحدات ESC بحيث يمكن توصيلها مباشرة بلوحة توزيع الطاقة دون الحاجة إلى اللحام.
الإطار (X500 v2) مصنوع من نسيج قطني طويل من ألياف الكربون بالكامل، مع أذرع أنبوبية من ألياف الكربون مدعومة بموصلات النايلون المقوى بالألياف المصممة حديثًا مع شقوق مريحة على كلا جانبي المحرك والجسم، مما يوفر تركيبًا أسهل وأكثر وضوحًا. يتكون جهاز الهبوط من أنابيب من ألياف الكربون بقطر 16 مم و10 مم مع موصلات تم سماكتها وتقويتها.
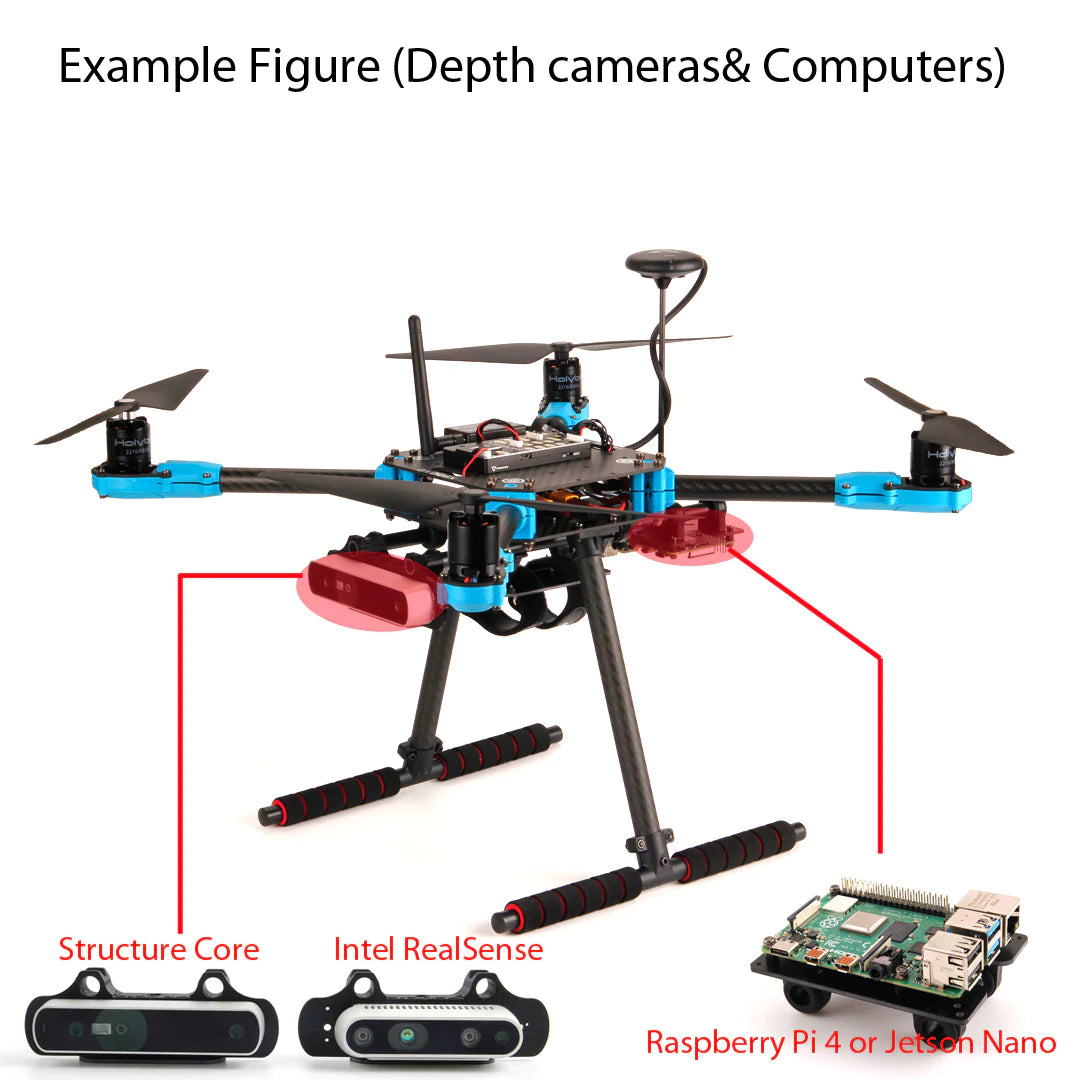
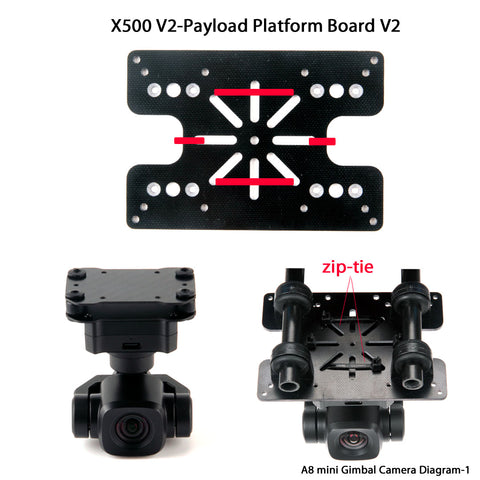
تحتوي لوحة المنصة الآن على فتحات تثبيت لنظام تحديد المواقع العالمي (GPS) وأجهزة الكمبيوتر المصاحبة المشهورة مثل Raspberry Pi 4 وJetson Nano. يوجد حامل كاميرا عمق اختياري (يتم شراؤه بشكل منفصل) لمختلف كاميرات العمق مثل سلسلة Intel RealSense وكاميرات العمق الأساسية الهيكلية. تمت زيادة التباعد بين ألواح ألياف الكربون العلوية والسفلية لتوفير وصول أسهل. تم توسيع لوحة تركيب البطارية القابلة للتعديل لدعم البطاريات الأكبر لوقت طيران أطول. نظام تركيب السكك الحديدية جاهز لاستيعاب مجموعة كاملة من حوامل الكاميرا ومحورها لمختلف التطبيقات. يتم توفير جميع أدوات التثبيت في العبوة.
ملاحظة: وحدة التحكم في الطيران Pixhawk 6C متوافقة مع كل من PX4 وArdupilot، ولكن يتم شحنها مع البرنامج الثابت PX4 مفتوح المصدر للطيار الآلي.
الميزة:
- وحدة التحكم في الطيران Pixhawk 6C الجديدة كليًا أو وحدة التحكم في الطيران Pixhawk 6X مع M10 وحدة نظام تحديد المواقع العالمي (GPS) وراديو القياس عن بعد "التوصيل والتشغيل"
- تصميم إطار جديد بأقل وقت للتجميع (~30 دقيقة)، لا يتطلب لحام
- إطار من ألياف الكربون مع موصلات من النايلون المقوى بالألياف مما يوفر تركيبًا سهلاً ومباشرًا
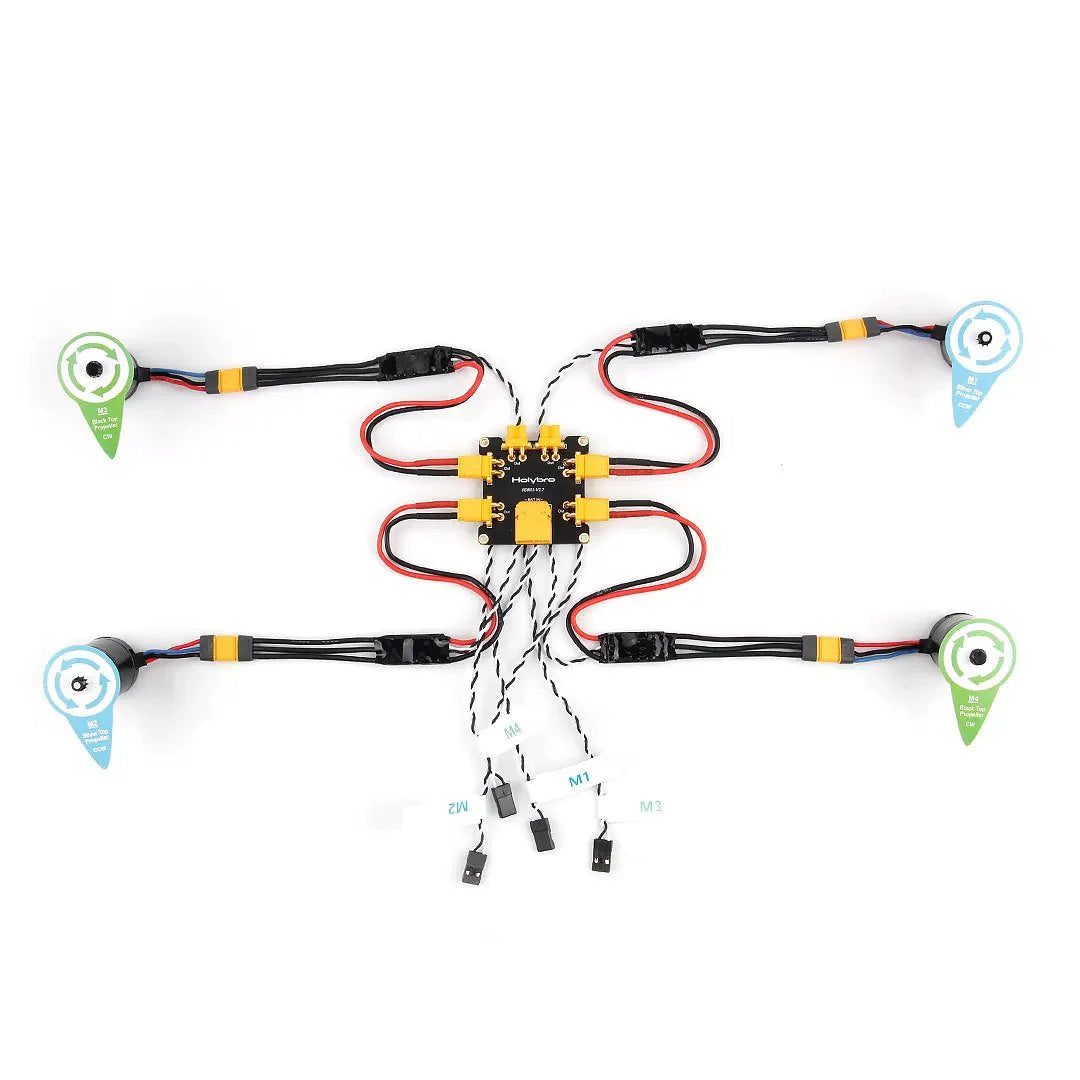
- المحركات المثبتة مسبقًا ووحدات ESC مع مقابس طاقة XT30 البسيطة لـ PDB
- لوحة توزيع الطاقة (PDB) مع مقابس XT60 وXT30
- حامل للكمبيوتر المرافق مثل Raspberry Pi وNvidia Jetson Nano
- حامل كاميرا عميق اختياري لـ Intel RealSense وStructure Core
ملاحظة:
- يأتي إصدار Pixhawk 6X الآن مزودًا بإصدار PM02D-HV (الجهد العالي). في PX4، يجب عليك تعيينSENS_EN_INA228لتمكين هذا. إصدار HV هذا مدعوم فقط في ardupilot 4.4 والإصدارات الأحدث. يمكن العثور على دليل الإعداد هنا.
-
يلزم دعم البرامج الثابتة لنظام M10 GPS: PX4 1.14 وArduPilot 4.3 أو أحدث.
مجموعة تطوير PX4 - X500 v2 تتضمن:
- جهاز التحكم في الطيران الآلي: Pixhawk 6C (علبة بلاستيكية) & PM02 V3 أو Pixhawk 6X (قاعدة قياسية) & PM02D
- وحدة M10 GPS
- راديو القياس عن بعد SiK V3 433/915 ميجا هرتز
- مجموعة إطارات X500 V2 (SKU30120)
-
العناصر المثبتة مسبقًا:
- المحركات - محرك Holybro 2216 KV920 (4 قطع) مع قابس XT30 (يمكن العثور على مواصفات المحرك هنا)
- ESCs - BLHeli S ESC 20A (4 قطع) مع مقابس XT30 - متوافق مع بطارية 4S
- 1045 مراوح (6 قطع)
- لوحة توزيع الطاقة (قابس XT60 للبطارية وقابس XT30 للأجهزة الكهربائية والإلكترونية والأجهزة الطرفية)
-
عناصر اختيارية أخرى (تُباع بشكل منفصل)
- جهاز التحكم RadioMaster TX16S RC
- جهاز استقبال راديو ماستر R81
- قاعدة كاميرا العمق
تفاصيل مجموعة الإطارات X500 V2 (SKU30120):
- الجسم - اللوحة العلوية والسفلية بالكامل من ألياف الكربون (144 × 144 مم، بسمك 2 مم)
- الذراع - أنابيب من ألياف الكربون عالية القوة وخفيفة الوزن للغاية مقاس 16 مم مع موصلات من النايلون المقوى بالألياف مصممة حديثًا
- معدات الهبوط - أنابيب من ألياف الكربون بقطر 16 مم و10 مم مع موصلات بلاستيكية معززة ومحسنة.
- لوحة المنصة - مع فتحات تثبيت لنظام تحديد المواقع العالمي (GPS) والكمبيوتر المرافق الشهير مثل Raspberry Pi 4 وJetson Nano
- نظام تركيب قضيب مزدوج 10 مم × 250 مم
- حامل البطارية بحزامي البطارية
- أدوات يدوية للتركيب
المواصفات الميكانيكية:
- قاعدة العجلات: 500 ملم
- نمط تركيب المحرك: 16x16 ملم
- جسم الإطار: 144 × 144 مم، سمك 2 مم
- ارتفاع جهاز الهبوط: 215 ملم
- المسافة بين اللوحتين العلوية والسفلية: 28 مم
- الوزن: 610 جرام
- مدة الرحلة: ~18 دقيقة بدون حمولة إضافية. تم اختباره باستخدام بطارية بسعة 5000 مللي أمبير.
- الحمولة: 1500 جرام (بدون البطارية، 70% خانق)
- توصية البطارية: 4S 3000-5000mAh 20C+ مع بطارية XT60 Lipo (غير متضمنة)

دليل تجميع X500 v2
المرجع:
مواصفات المحرك
طباعة ثلاثية الأبعاد:
طباعة Holybro_X500_V2_3Dدليل الإعداد:
مقالة الروبوتات الآلية
دليل إعداد PX4
دليل إعداد Ardupilot
بعض النصائح:
Related Collections