


JUXIE INTELLIGENT CE-HM-R102 Series 48V 440W Robot Motor، مخفض توافقي، تشفير مزدوج 19 بت، EtherCAT/CAN
JUXIE INTELLIGENT CE-HM-R102 Series 48V 440W Robot Motor، مخفض توافقي، تشفير مزدوج 19 بت، EtherCAT/CAN
JUXIE INTELLIGENT
سعر عادي
$2,699.00 USD
سعر عادي
سعر البيع
$2,699.00 USD
سعر الوحدة
per
Taxes included.
الشحن محسوب عند السداد.
تعذر تحميل توفر الالتقاط
ملخص
جوكسي الذكي محرك الروبوت من سلسلة CE-HM-R102 عبارة عن وحدة مفصلية ذكية صغيرة الحجم مصممة خصيصًا لتطبيقات الروبوتات. تتضمن هذه الوحدة مُخفِّضًا توافقيًا عالي الدقة، ومحرك عزم دوران بدون إطار، ومشفِّرين مغناطيسيين (بدقة 19 بت لكل دورة)، وهيكلًا مجوفًا بالكامل. تدعم ثلاثة تكوينات لنسبة التروس (51:1، 101:1، 161:1) استخدامها في الروبوتات الشبيهة بالبشر وغيرها من أنظمة الروبوتات التي تتطلب رد فعل عكسي منخفضًا وعزم دوران ثابتًا.
الميزات الرئيسية
- مُخفِّض توافقي عالي الدقة مُدمج ومحرك عزم دوران بدون إطار.
- مشفرات مغناطيسية مزدوجة؛ دورة واحدة مطلقة 19 بت لكل دورة.
- تصميم عمود مجوف بالكامل في جميع أنحاء السلسلة.
- ثلاثة تكوينات: 51:1، 101:1، 161:1 مع عزم دوران مصنف يصل إلى 147 نيوتن متر وعزم دوران ذروة يصل إلى 350 نيوتن متر.
- رد فعل منخفض: 15 ثانية قوسية.
- جهد التشغيل المقدر 48 فولت، القدرة المقدرة 440 واط، السرعة المقدرة 3000 دورة في الدقيقة.
- واجهة برنامج تشغيل EtherCAT/CAN؛ حلقة التيار 50 كيلو هرتز، حلقة السرعة 10 كيلو هرتز.
تحديد
| المعلمة | 51:1 | 101:1 | 161:1 |
|---|---|---|---|
| سرعة الخرج (دورة في الدقيقة) | 60 | 30 | 18 |
| عزم الدوران المقدر (نيوتن متر) | 46 | 92 | 147 |
| عزم الدوران الأقصى (نيوتن متر) | 115 | 230 | 350 |
| رد الفعل العكسي (أرسيك) | 15 | 15 | 15 |
| الجهد المقنن (فولت) | 48 | 48 | 48 |
| القدرة المقدرة (واط) | 440 | 440 | 440 |
| السرعة المقدرة (دورة في الدقيقة) | 3000 | 3000 | 3000 |
| التيار المقنن (أمبير) | 10.5 | 10.5 | 10.5 |
| ذروة التيار (أمبير) | 28 | 28 | 28 |
| المشفر | مشفرات مزدوجة؛ دورة واحدة مطلقة 19 بت لكل دورة | مشفرات مزدوجة؛ دورة واحدة مطلقة 19 بت لكل دورة | مشفرات مزدوجة؛ دورة واحدة مطلقة 19 بت لكل دورة |
| واجهة برنامج التشغيل | إيثركات/كان؛ حلقة التيار 50 كيلوهرتز؛ حلقة السرعة 10 كيلوهرتز | إيثركات/كان؛ حلقة التيار 50 كيلوهرتز؛ حلقة السرعة 10 كيلوهرتز | إيثركات/كان؛ حلقة التيار 50 كيلوهرتز؛ حلقة السرعة 10 كيلوهرتز |
| الأبعاد الكلية | R102*73.5mm | R102*73.5mm | R102*73.5mm |
| الوزن الإجمالي | 2.0 كجم | 2.0 كجم | 2.0 كجم |
| التطبيقات النموذجية | مفصل الكتف، مفصل الركبة، مفصل الخصر | مفصل الكتف، مفصل الركبة، مفصل الخصر | مفصل الكتف، مفصل الركبة، مفصل الخصر |
التطبيقات
- الروبوتات الشبيهة بالبشر
- الأذرع الروبوتية
- الهياكل الخارجية
- روبوتات رباعية الأرجل
- مركبات AGV
- روبوتات ARU
- جهاز التصوير المقطعي المحوسب للأسنان
- مفاصل الروبوت: الكتف، الركبة، الخصر
كتيبات
تفاصيل
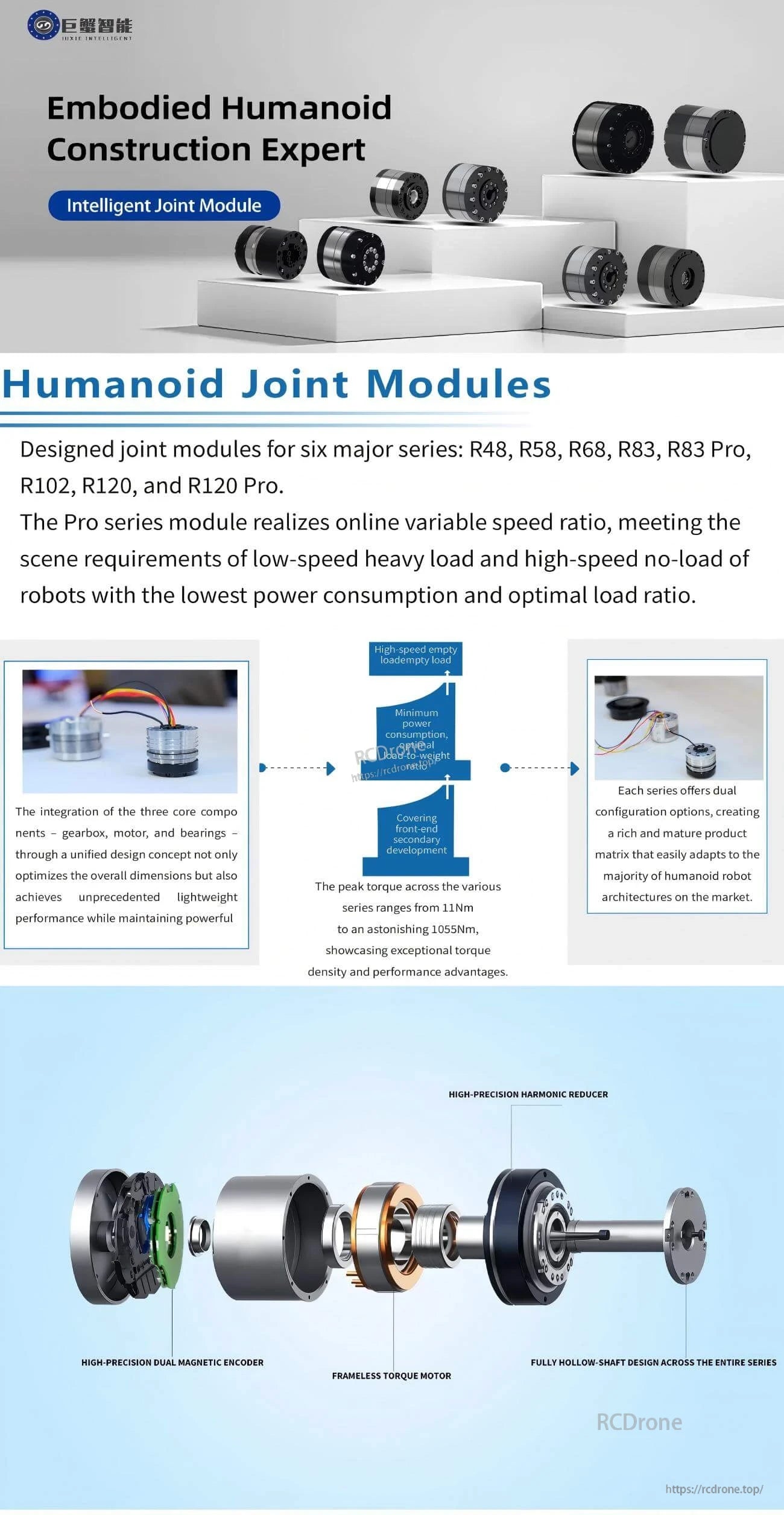
وحدات مفاصل ذكية للروبوتات الشبيهة بالبشر، تتميز بمخفض توافقي عالي الدقة، ومشفر مغناطيسي مزدوج، ومحرك عزم دوران بدون إطار، وتصميم عمود مجوف. تُقدم ست سلاسل بنسبة سرعة متغيرة، واستهلاك منخفض للطاقة، وعزم دوران أقصى يصل إلى 1055 نيوتن متر.

Related Collections


