













يد روبوت LINKERBOT Linker Hand L10، 10 درجات حرية، تحكم CAN/RS485، ناقل حركة دودي، قوة قبضة 80 نيوتن، تيار مستمر 24 فولت ±10%
يد روبوت LINKERBOT Linker Hand L10، 10 درجات حرية، تحكم CAN/RS485، ناقل حركة دودي، قوة قبضة 80 نيوتن، تيار مستمر 24 فولت ±10%
LINKERBOT
تعذر تحميل توفر الالتقاط
نظرة عامة
LINKERBOT يد Linker Hand L10 هو يد روبوت مصممة للتلاعب الدقيق والتحكم الدقيق. تتميز بـ 10 درجات من الحرية مع نقل تروس دودية وتتواصل عبر CAN/RS485 للتكامل الموثوق في أنظمة البحث والصناعة.
الميزات الرئيسية
- يد مرنة بـ 10 درجات من الحرية مع نقل تروس دودية لتفعيل مستقر.
- واجهات التحكم: CAN و RS485.
- دقة تكرار الموضع < +/-0.2mm; الوقت النموذجي لفتح/إغلاق 1.2s.
- قدرة القوة: 15N كحد أقصى لقوة طرف الإبهام، 15N كحد أقصى لقوة طرف الأصابع الأربعة، 80N كحد أقصى لقوة القبض بخمس أصابع.
- أوضاع التحكم والمرافق من دليل المنتج: التحكم في الموضع، التحكم في السرعة، ردود الفعل اللمسية (تحكم القوة) عبر مستشعرات أطراف الأصابع، وتحديث البرنامج الثابت عبر الإنترنت.
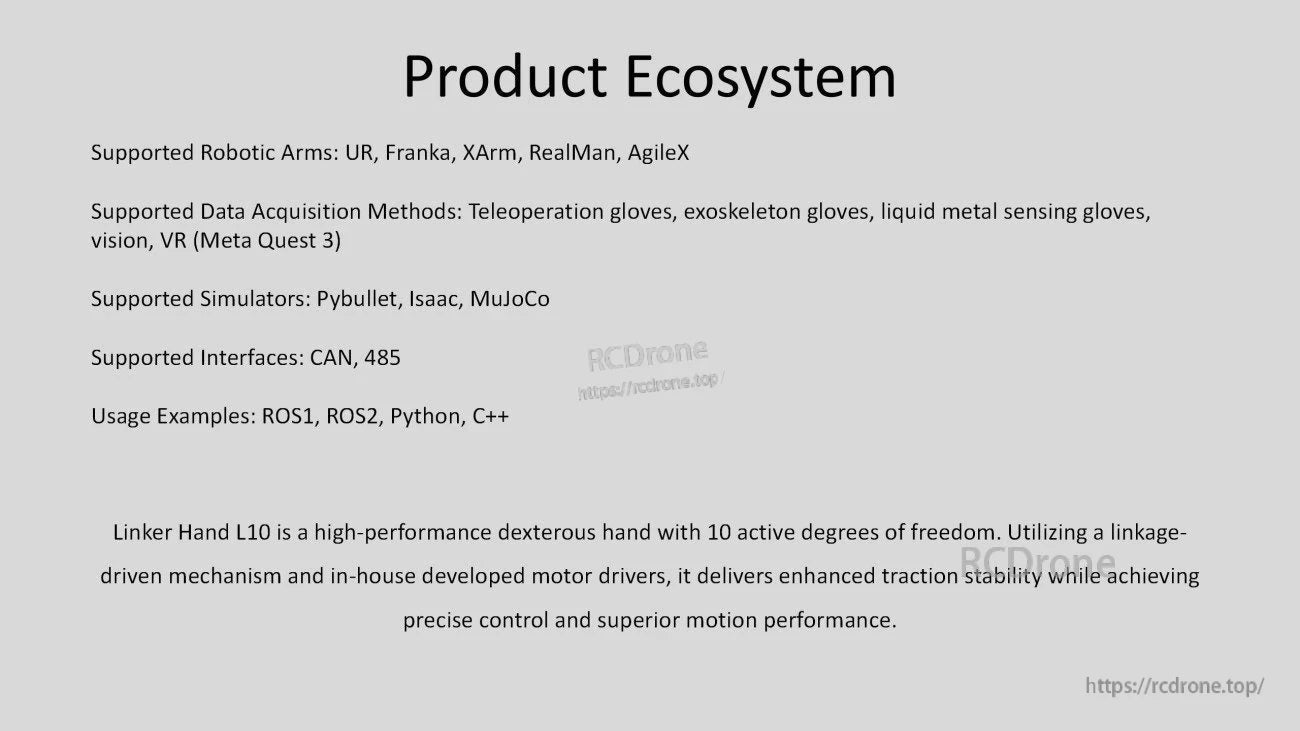
- النظام البيئي (حسب مواد المنتج): الأذرع الروبوتية المدعومة UR، Franka، XArm، RealMan، AgileX؛ المحاكيات المدعومة Pybullet، Isaac، MuJoCo؛ تشمل أمثلة الاستخدام ROS1، ROS2، Python، C++؛ تشمل طرق جمع البيانات قفازات التحكم عن بُعد، قفازات الهيكل الخارجي، قفازات استشعار المعدن السائل، الرؤية، والواقع الافتراضي (Meta Quest 3).
للدعم قبل البيع أو التكامل، اتصل بـ [email protected] or أو قم بزيارة https://rcdrone.top/.
المواصفات
| درجات الحرية (DoF) | 10 |
| عدد المفاصل | 20 (10 نشطة + 10 سلبية) |
| وضع النقل | نقل تروس دودية |
| واجهة التحكم | CAN/RS485 |
| الوزن | 800غ |
| الحمولة القصوى | 25كغ |
| جهد التشغيل | DC24V+/-10% |
| التيار الثابت | 0.2أ |
| متوسط التيار (حركة بدون حمل) | 0.5أ |
| التيار الأقصى | 3أ |
| دقة إعادة تحديد الموضع | < +/-0.2مم |
| وقت الفتح/الإغلاق | 1. |
| أقصى قوة طرف إصبع الإبهام | 15N |
| أقصى قوة طرف إصبع الأربعة أصابع | 15N |
| أقصى قوة قبضة خمسة أصابع | 80N |
حساس الضغط
| مجموعة بيزوريستيف | 6*12 |
| منطقة تحمل قوة الحساس | 9.6*14.4مم |
| قوة الزناد | 5غ |
| نطاق القياس | 20ن |
| عمر الخدمة | 100,000 دورة |
| معدل إطار الاتصال | 200إطارات في الثانية |
حساس سعوي (اختياري)
| تردد العينة | &>=50هرتز |
| نطاق القياس | 0-30ن |
| حد التحميل الزائد | 60ن |
| حساسية الضغط | 0.1ن |
| دقة القياس | 0.5%FS |
| دقة الضغط | 2%FS |
| دقة الضغط | 0.25N |
| دقة الاتجاه | 45° |
| مسافة الكشف | 1 سم (معدن، جسم الإنسان) |
ما هو متضمن
- كابل تصحيح USB إلى CAN x1
- كابل موصل XT30 (2+2) x1
- محول الطاقة x1
- كابل الطاقة x1
- رابط يد L10 x1
التطبيقات
- بحث وتعليم في التلاعب الماهر باستخدام ROS1/ROS2 والمحاكيات (Pybullet، Isaac، MuJoCo).
- التحكم عن بعد عبر القفازات، قفازات الهيكل الخارجي، قفازات استشعار المعدن السائل، الرؤية، والواقع الافتراضي (Meta Quest 3).
- التجميع الدقيق، العمليات المستندة إلى المسار، شد البراغي، الإمساك بالأوراق الرقيقة، والتعامل العام مع الأشياء.
الكتيبات
Linker_Hand_L10_Product_Manual.pdf
التفاصيل

تقدم يد Linker Hand L10 10 درجات من الحرية، حركة دقيقة عبر آلية الربط ومحركات مخصصة. تدعم UR و Franka و ROS و Python و VR و Pybullet و CAN والمزيد من أجل تكامل وتحكم روبوتي متعدد الاستخدامات.
تقدم يد Linker Hand L10 دقة عالية، حيث توفر كل إصبع 4 درجات من الحرية للعمليات الدقيقة. نظامها متعدد المستشعرات - المجهز بكاميرات وبشرة إلكترونية - يوفر وعيًا بيئيًا شاملاً وتفاعلًا تكيفيًا. من خلال تكامل السحابة النهائية، يمكن للمستخدمين نشر اليد بسرعة عبر خدمة مكتبة المهارات السحابية بدون كود، مما يتيح تخصيصًا فعالًا مع تقليل التعقيد التشغيلي. تدعم هذه القدرات معًا مجموعة واسعة من التطبيقات المعقدة، مما يعزز كل من الدقة وسهولة الاستخدام دون الحاجة إلى برمجة أو إعداد مكثف.

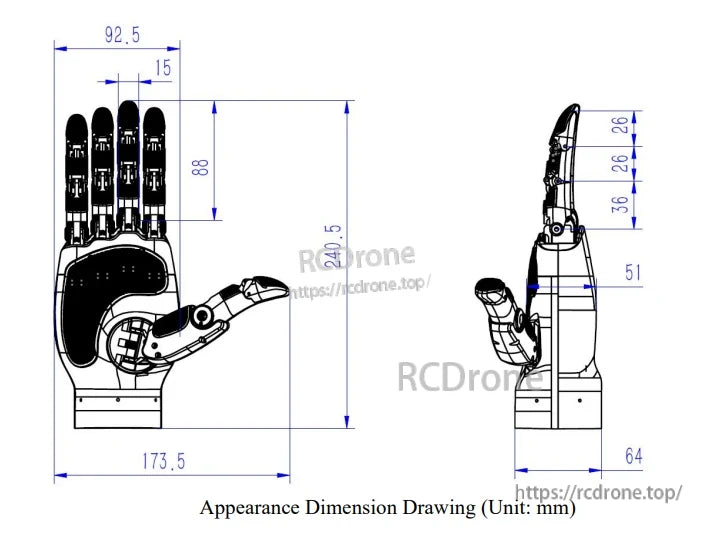
أبعاد يد الروبوت بالمليمترات، تظهر المناظر الأمامية والجانبية مع قياسات دقيقة للتصميم والتجميع.
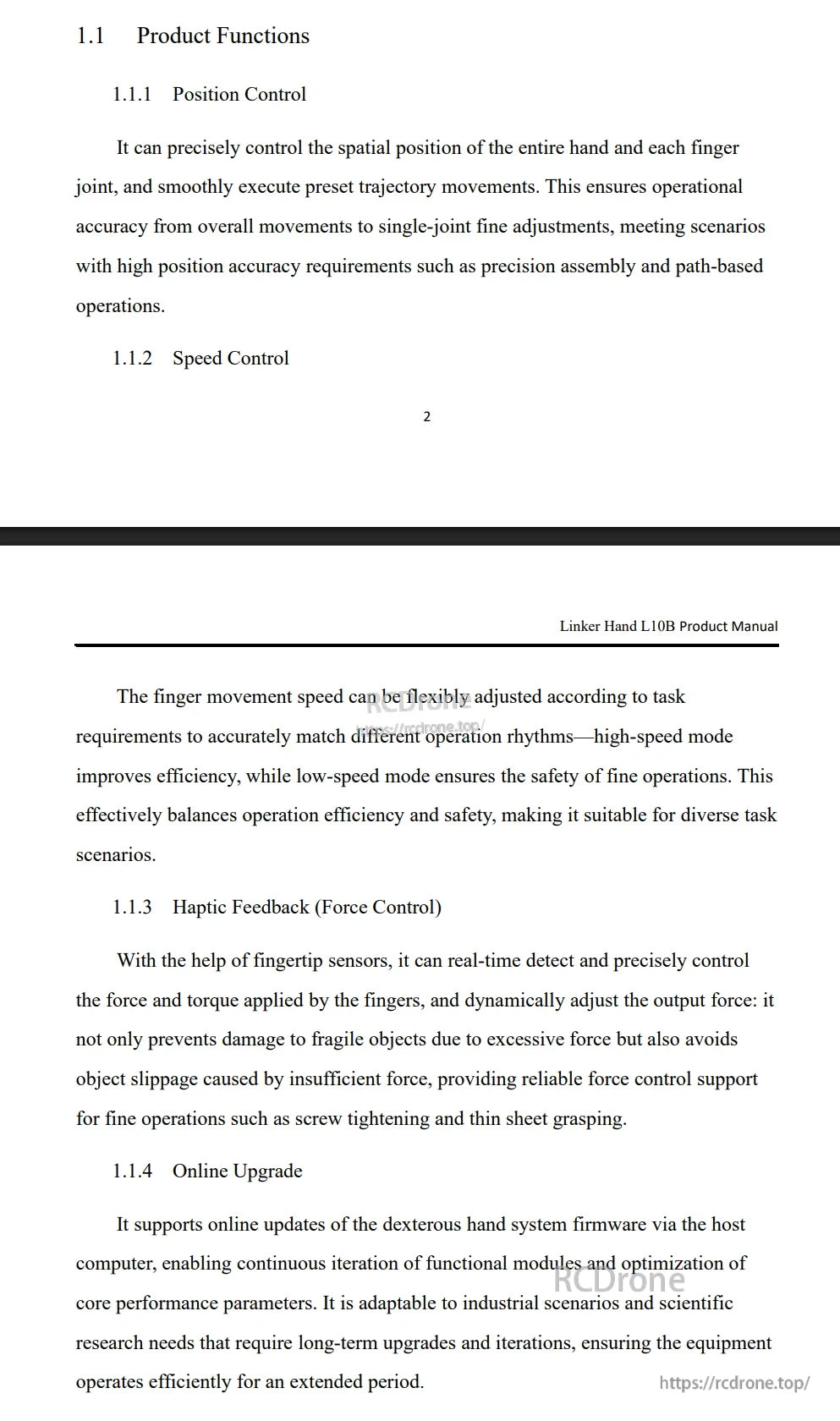
تقدم يد Linker L10B تحكمًا دقيقًا في الموضع والسرعة، واستجابة لمسية لإدارة القوة، وتحديثات للبرامج الثابتة عبر الإنترنت. مصممة للدقة والسلامة والقدرة على التكيف في التطبيقات الصناعية والبحثية التي تتطلب تحكمًا دقيقًا وأداءً طويل الأمد.
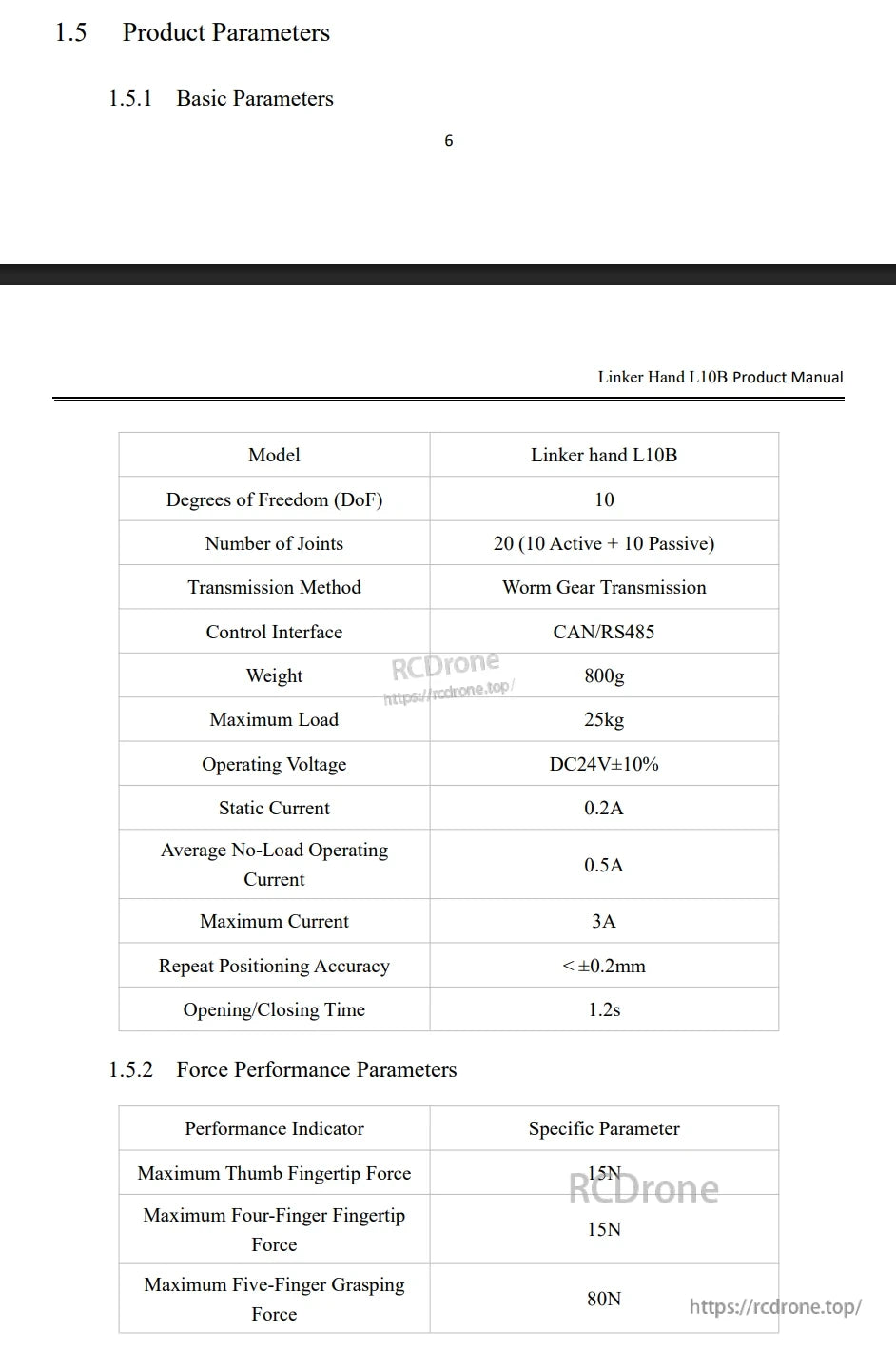
تقدم يد Linker L10B 10 درجات حرية، و20 مفصلًا، ونقل تروس دودية، وتحكم CAN/RS485. تزن 800 جرام، وتتعامل مع ما يصل إلى 25 كجم عند DC24V، مما يوفر تحديدًا دقيقًا للقوى القابضة تصل إلى 80 نيوتن.

تتميز بمصفوفة بيوزوريستيفية 6x12 (نطاق 20 نيوتن، 100 ألف دورة). مستشعر سعوي اختياري: ≥50 هرتز عينة، نطاق 0–30 نيوتن، دقة اتجاه 45°، يكشف عن المعدن أو جسم الإنسان على بعد 1 سم.
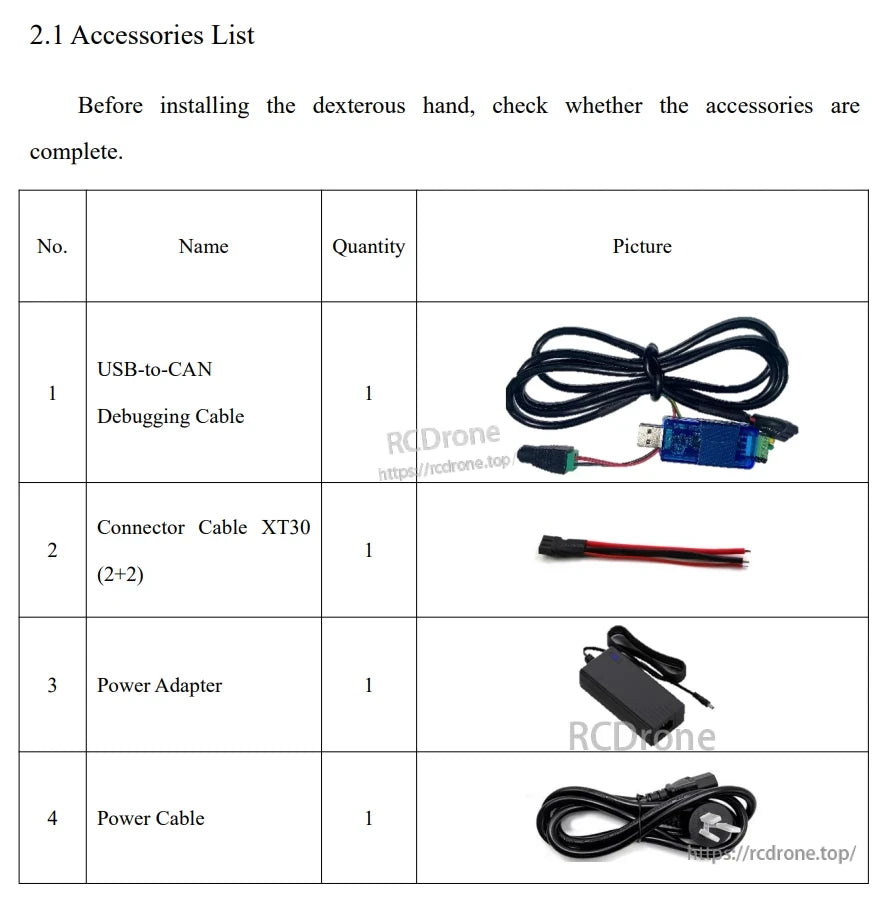
قائمة الملحقات لتركيب اليد الماهرة: كابل USB إلى CAN، موصل XT30، محول الطاقة، وكابل الطاقة، كل منها بكمية واحدة.
Related Collections













