







يد روبوت LINKERBOT Linker Hand L6، 6 درجات حرية، CAN، محرك ربط، قوة قبض 50 نيوتن، تكرار ±0.2 مم
يد روبوت LINKERBOT Linker Hand L6، 6 درجات حرية، CAN، محرك ربط، قوة قبض 50 نيوتن، تكرار ±0.2 مم
LINKERBOT
تعذر تحميل توفر الالتقاط
نظرة عامة
LINKERBOT يد Linker Hand L6 هو يد روبوت مرنة مصممة للتلاعب الدقيق. تتميز بـ 6 درجات من الحرية (DoF) و 11 مفصلًا (6 نشطة + 5 سلبية) مع نقل ربط وواجهة تحكم CAN. الهيكل الموضح في صور المنتج يبرز أصابع معدنية بالكامل، سيليكون مقاوم للتآكل على أطراف الأصابع، حساسات ضغط لمسية بخمسة أصابع، أضواء مؤشر، وسادة مطاطية نصف كف مضادة للقرص، وأسطوانة كهربائية عالية الدقة مع دفع مباشر.
الميزات الرئيسية
- تلاعب مرن بـ 6 درجات من الحرية؛ 11 مفصلًا (6 نشطة + 5 سلبية).
- نقل ربط مع تحكم عبر ناقل CAN.
- دقة تكرار الموضع: ±0.2 مم.
- قدرة القوة: أقصى قوة طرف الإبهام 10N؛ أقصى قوة طرف أربعة أصابع 8N؛ أقصى قوة إمساك بخمسة أصابع 50N.
- مجموعة حساسات لمسية بخمسة أصابع بتقنية البيزرستيف لتقدير الاتصال/الضغط.
- عناصر التصميم المعروضة: أصابع معدنية بالكامل، أطراف سيليكون مقاومة للتآكل، ضوء مؤشر، وسادة مطاطية مضادة للقرص.
- تصميم مدمج &و مرن؛ نظام متعدد الحساسات (بما في ذلك الكاميرات والجلد الإلكتروني) وتكامل الجهاز مع السحابة كما هو موضح في صور المنتج.
للحصول على الدعم الفني والمبيعات، اتصل بـ [email protected] or أو قم بزيارة https://rcdrone.top/.
المواصفات
| المعلمة | القيمة |
|---|---|
| درجات الحرية (DoF) | 6 |
| عدد المفاصل | 11 (6 نشطة + 5 سلبية) |
| وضع النقل | نقل الربط |
| واجهة التحكم | CAN |
| الوزن | 623.5 جرام |
| الحمولة القصوى | 28 كجم |
| جهد التشغيل | DC24V±10% |
| التيار الساكن | 0.2A |
| متوسط التيار (حركة بدون حمل) | 0.75A |
| التيار الأقصى | 1.4A |
| دقة إعادة تحديد الموضع | ±0.2مم |
| أقصى قوة طرف الإبهام | 10ن |
| أقصى قوة طرف أربعة أصابع | 8ن |
| أقصى قوة قبض خمسة أصابع | 50ن |
أداء الحركة
| جزء الحركة | نطاق الزاوية (°) | سرعة الحركة (°/ث) |
|---|---|---|
| قاعدة الإبهام | 57 | 152.82 |
| قاعدة إصبع السبابة | 72.30 | 213.27 |
| قاعدة إصبع الوسطى | 72.90 | 208.29 |
| قاعدة إصبع الخاتم | 73.10 | 202.49 |
| قاعدة إصبع الخنصر | 72.60 | 201.11 |
| طرف الإبهام | 69.90 | 192.84 |
| طرف إصبع السبابة | 64.60 | 192.84 |
| طرف إصبع الوسطى | 65.10 | 185.32 |
| طرف إصبع الخاتم | 66.90 | 185.32 |
| طرف إصبع الخنصر | 66.70 | 184.76 |
| حركة جانبية للإبهام | 80 | 235.29 |
| أوقات الفتح والإغلاق | - | 0.35s |
المستشعرات
| المعلمة | المواصفات |
|---|---|
| مجموعة مقاومة الضغط | 6*12 |
| منطقة تحمل قوة المستشعر | 9.6*14.4مم |
| قوة الزناد | 5غ |
| نطاق القياس | 20ن |
| عمر الخدمة | 100,000 دورة |
| معدل إطار الاتصال | 200إطارات في الثانية |
| نطاق القيمة | 0~4095 |
أبعاد المظهر
| التعريف | المعلمة (مم) |
|---|---|
| الطول من طرف الإصبع الأوسط إلى قاعدة الكف | 190.7 |
| أقصى عرض للكف | 121 |
| الطول من طرف الإبهام إلى قاعدة الكف | 134.3 |
| ارتفاع المعصم | 9. | 5
| قطر المعصم | 60 |
ما هو المضمن
- كابل تصحيح USB إلى CAN x1
- كابل موصل XT30 (2+2) x1
- محول الطاقة x1
- كابل الطاقة x1
- يد Linker L6 x1
التطبيقات
- الإمساك الدقيق والتعامل مع الأجسام
- الإمساك بالأدوات والتلاعب بها
- مهام التقاط ووضع المكونات
الكتيبات
التفاصيل


يد روبوتية عالية الأداء ومرنة مع 6 درجات من الحرية. تتميز بخفة الحركة المدمجة، ونظام متعدد المستشعرات، وتكامل الجهاز مع السحابة للتحكم الدقيق، والتكيف مع البيئة، وتخصيص بدون كود عبر مكتبة مهارات السحابة.



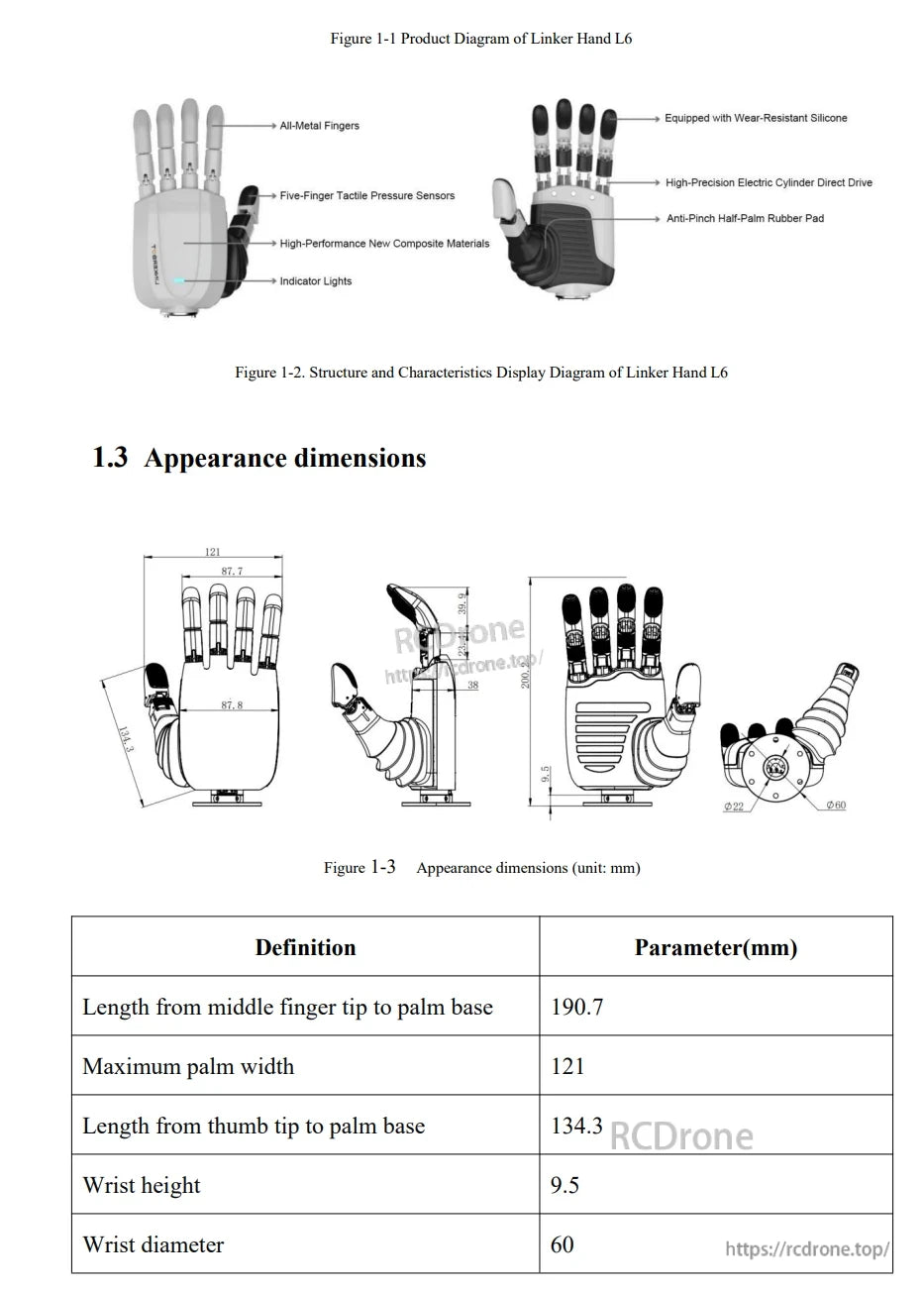
يد Linker Hand L6 تحتوي على أصابع معدنية بالكامل، حساسات لمسية، سيليكون مقاوم للاهتراء، محرك أسطوانة كهربائية، وسادة مطاطية مضادة للقرص. طول الإصبع: 190.7 مم؛ عرض الكف: 121 مم؛ قطر المعصم: 60 مم.
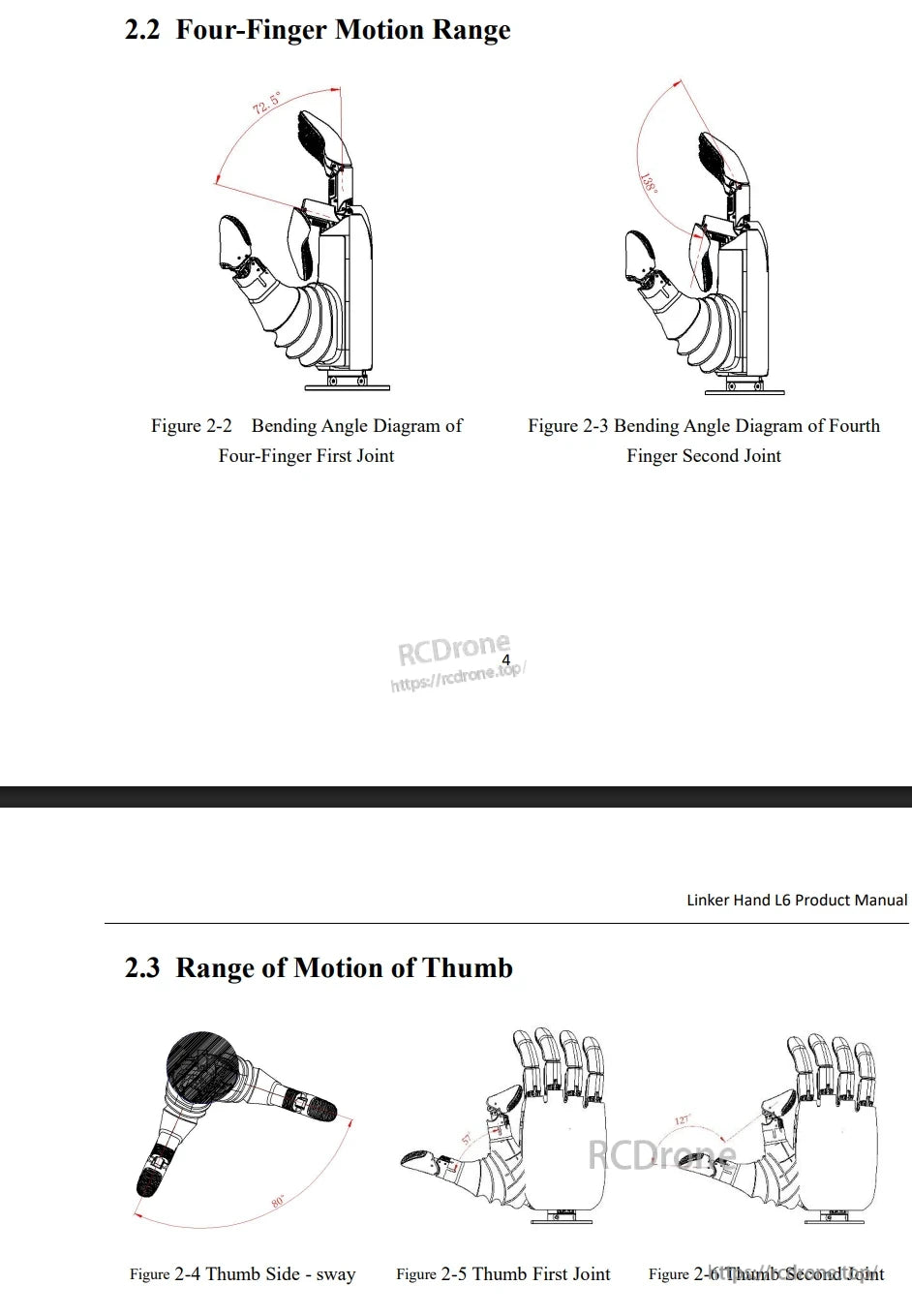
نطاقات حركة مفاصل الإصبع والإبهام: المفصل الأول لأربعة أصابع 72.5°، المفصل الثاني 138°؛ حركة الإبهام الجانبية 80°، المفصل الأول 57°، المفصل الثاني 127°.
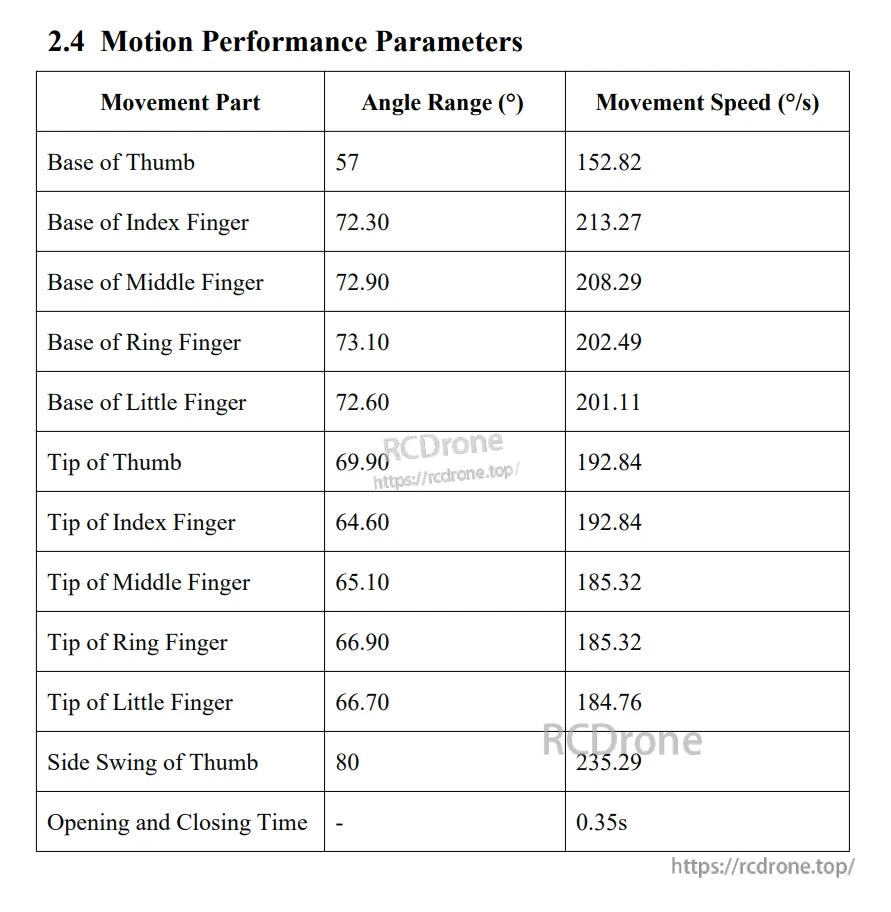
معلمات حركة أصابع اليد الروبوتية: تأرجح الإبهام عند 235.29°/ث، الفتح/الإغلاق في 0.35 ثانية—مما يظهر دقة في الحركة مع نطاقات زوايا المفاصل والسرعات المفصلة.
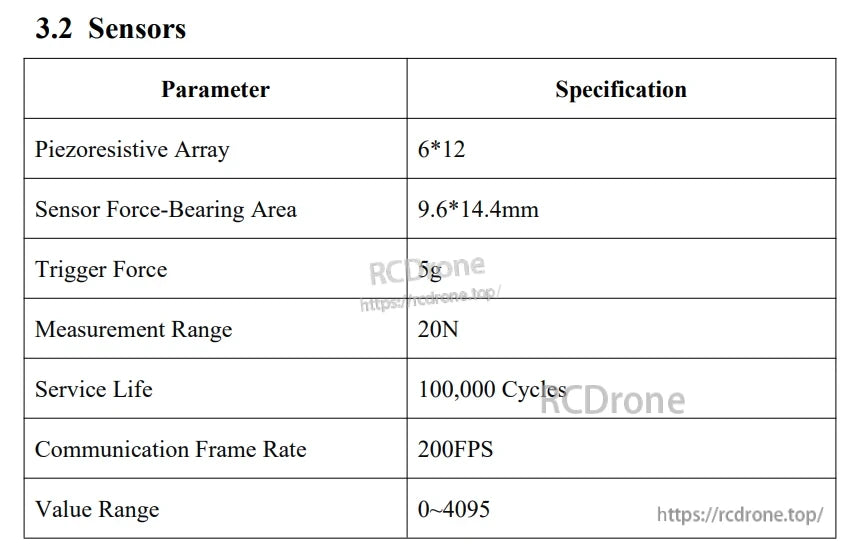
مواصفات الحساس: مصفوفة 6x12، منطقة 9.6x14.4 مم، زناد 5 جرام، نطاق 20 نيوتن، 100 ألف دورة، 200 إطار في الثانية، نطاق القيم 0-4095.
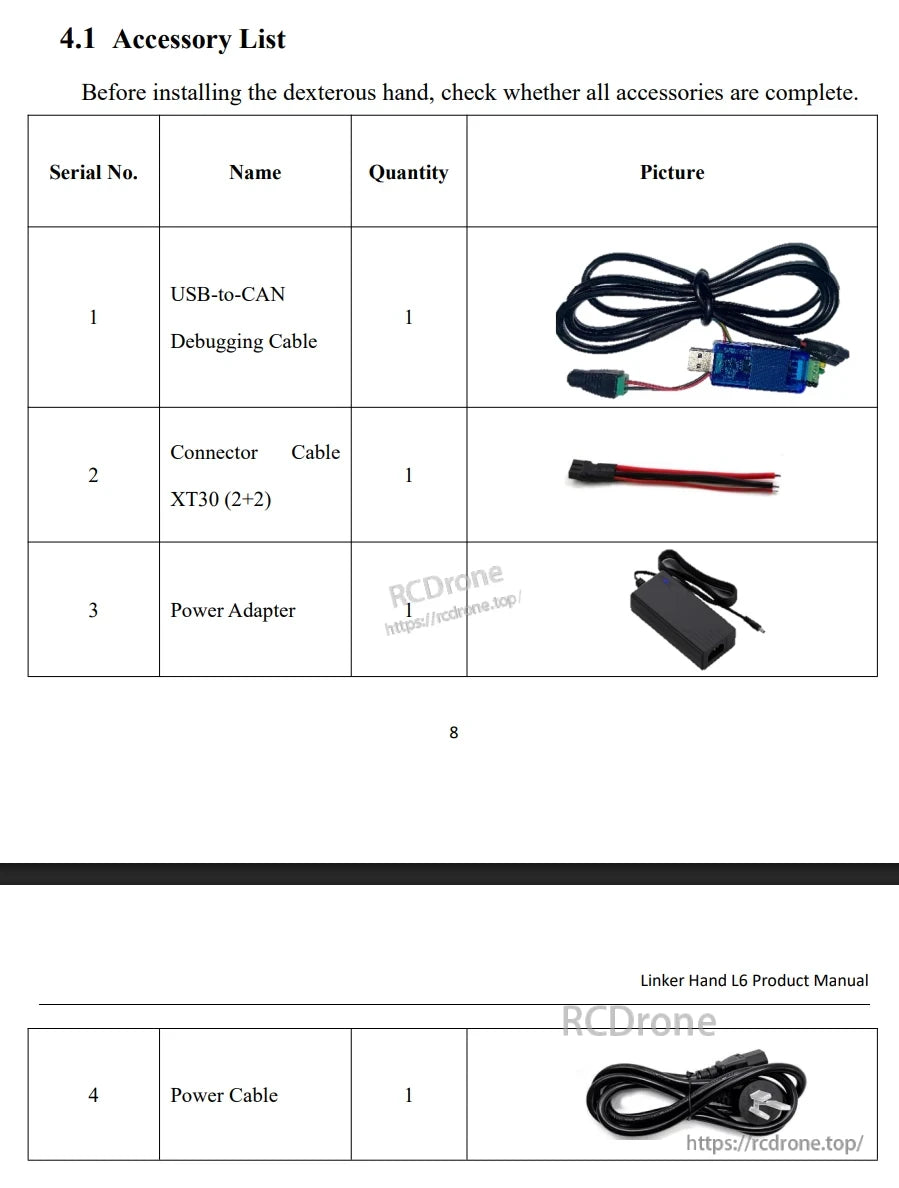
قائمة الملحقات ليد Linker Hand L6: كابل USB إلى CAN، موصل XT30، محول طاقة، وكابل طاقة. تحقق من الاكتمال قبل التثبيت.
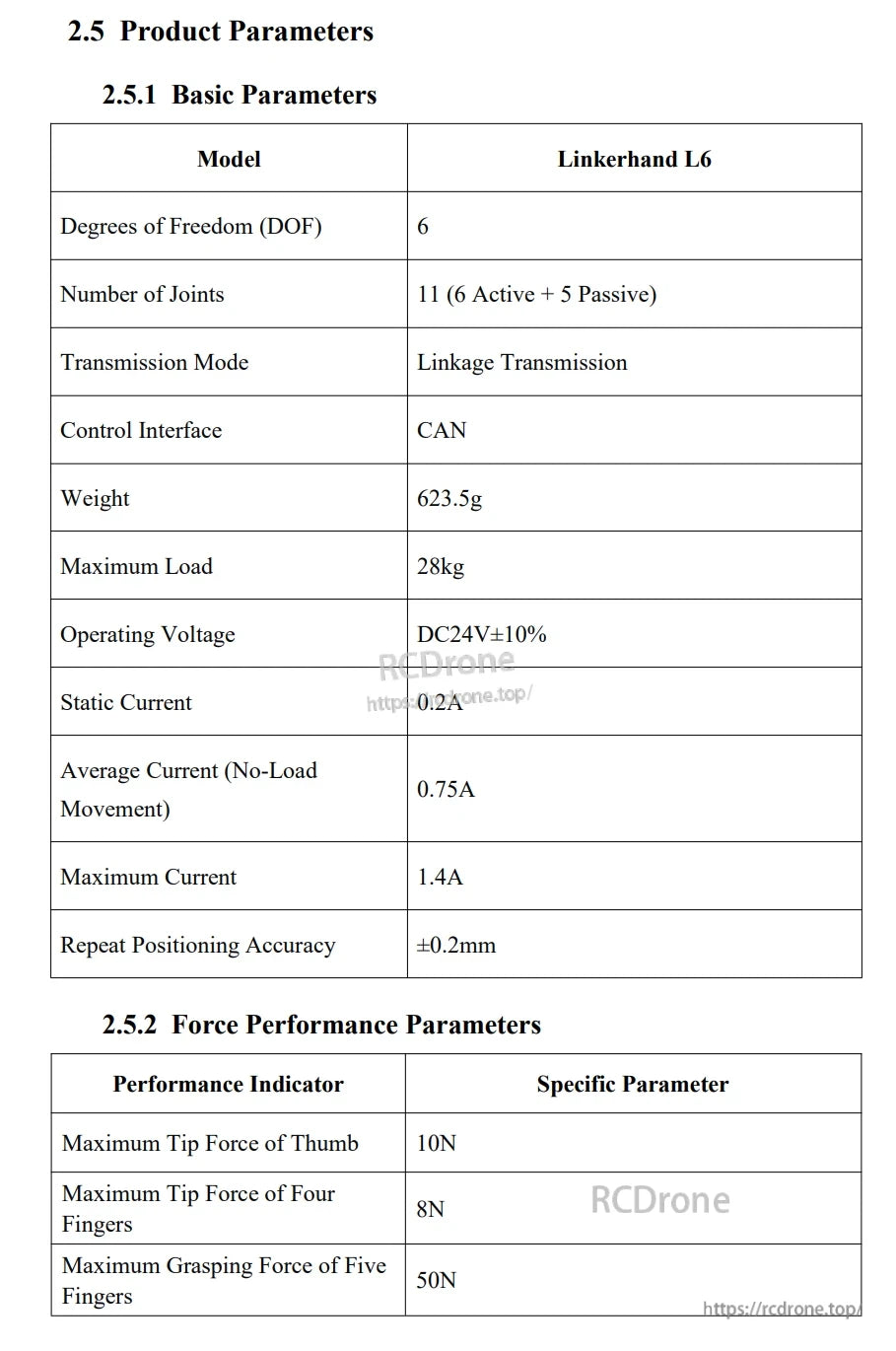
يد الروبوت Linkerhand L6 تحتوي على 6 درجات حرية، 11 مفصل، تحكم CAN، وزنها 623.5 جرام، تتحمل حمولة قصوى تبلغ 28 كجم، تعمل على جهد DC24V±10%، تقدم دقة ±0.2 مم، وتوفر قوة إمساك تصل إلى 50 نيوتن.
Related Collections







