







يد روبوت LINKERBOT Linker Hand O6، 6 درجات حرية، 11 مفصل، CAN/RS485، قوة قبضة 130 نيوتن، دقة ±0.2 مم، جهد DC24V±10%
يد روبوت LINKERBOT Linker Hand O6، 6 درجات حرية، 11 مفصل، CAN/RS485، قوة قبضة 130 نيوتن، دقة ±0.2 مم، جهد DC24V±10%
LINKERBOT
تعذر تحميل توفر الالتقاط
نظرة عامة
LINKERBOT Linker Hand O6 هو يد روبوت مصممة للتكامل المدمج والتلاعب الدقيق. يوفر 6 درجات من الحرية مع 11 مفصلًا (6 نشطة + 5 سلبية)، ونقل تروس دودية لتحقيق تشغيل مستقر، وتحكم CAN/RS485، واستشعار لمسي اختياري. الهيكل المرن يوفر قوة قبضة تصل إلى 130N مع دقة تكرار موضع ±0.2mm عند جهد تشغيل DC24V±10%. البناء الخفيف الوزن بوزن 370 جرام وبصمة صغيرة تدعم التعامل مع اللوجستيات، وتجميع الصناعات، وسيناريوهات القبض على الأشكال غير المنتظمة.
الميزات الرئيسية
مضغوط &ورشيق
تصميم هيكلي مضغوط يقلل من حمل المعدات بينما يعزز المرونة للتقاط دقيق في المساحات الضيقة.
متانة عالية
مصنوع من سبيكة الألمنيوم لخفته وقوته ومقاومته للتآكل، مما يدعم أداءً مستقراً على المدى الطويل.
تكامل الجهاز مع السحابة
يمكن تكامل الجهاز مع السحابة من نشر سريع عبر مكتبة مهارات قائمة على السحابة مع عملية مبسطة وتخصيص.
المواصفات
| الموديل | LINKERBOT يد الربط O6 |
| درجات الحرية (DoF) | 6 |
| عدد المفاصل | 11 (6 نشطة + 5 سلبية) |
| وضع النقل | نقل تروس دودية |
| واجهة التحكم | CAN/RS485 |
| الوزن | 370غ |
| الحمولة القصوى | 30كغ |
| جهد التشغيل | DC24V±10% |
| دقة إعادة تحديد الموقع | ±0.2مم |
| حساس لمسي | اختياري |
| أقصى قوة طرف الإبهام | 28ن |
| أقصى قوة لأطراف أربعة أصابع | 33ن |
| أقصى قوة قبضة لخمس أصابع | 130ن |
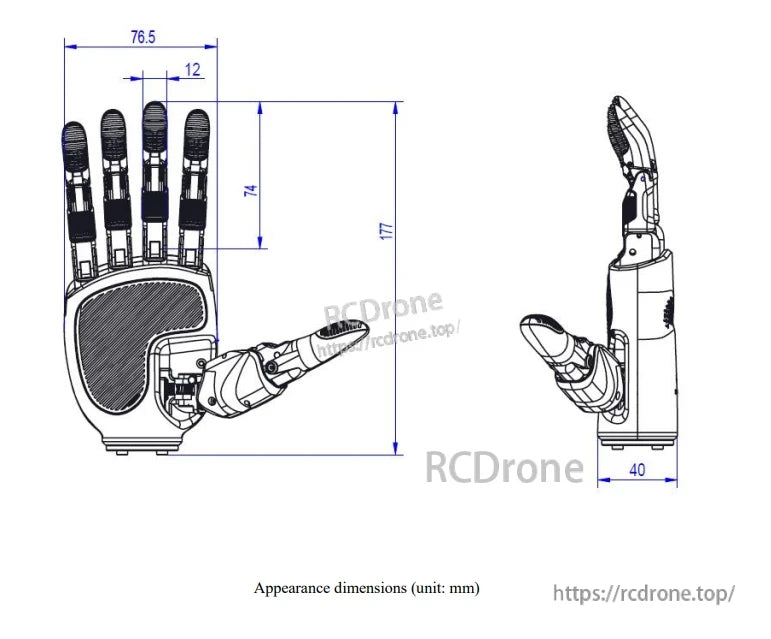
| الأبعاد (المظهر) | الارتفاع 177مم؛ العرض 76.5 مم؛ سمك 40 مم |
نطاق الحركة
| LF2، RF2، MF2، FF2 (انحناء) | 90° |
| LF1، RF1، MF1، FF1 (انحناء) | 80° |
| الإبهام 1 (انحناء) | 55° |
| الإبهام 2 (انحناء) | 30° |
| الإبهام 3 (جانبي - تمايل) | 88° |
ما هو متضمن
- كابل تصحيح USB إلى CAN ×1
- كابل موصل XT30 (2+2) ×1
- محول الطاقة ×1
- كابل الطاقة ×1
- رابط يد O6 ×1
للمبيعات أو الدعم الفني، اتصل بـ [email protected] or زيارة https://rcdrone.top/.
التطبيقات
- التعامل مع اللوجستيات ونقل المواد
- التجميع الصناعي والتلاعب بالأدوات
- الإمساك الثابت بالأشكال غير المنتظمة والأغراض الاستهلاكية
الكتيبات
Linker_Hand_O6_Product_Manual.pdf
التفاصيل

يقدم Linker Hand O6 6 مفاصل نشطة و5 مفاصل سلبية لتمسك دقيق وقوي. تصميم مدمج ومتين من الألمنيوم يناسب اللوجستيات والتجميع والإمساك غير المنتظم. يتميز بتكامل سحابي لتسهيل تدريب الذكاء الاصطناعي بدون برمجة.


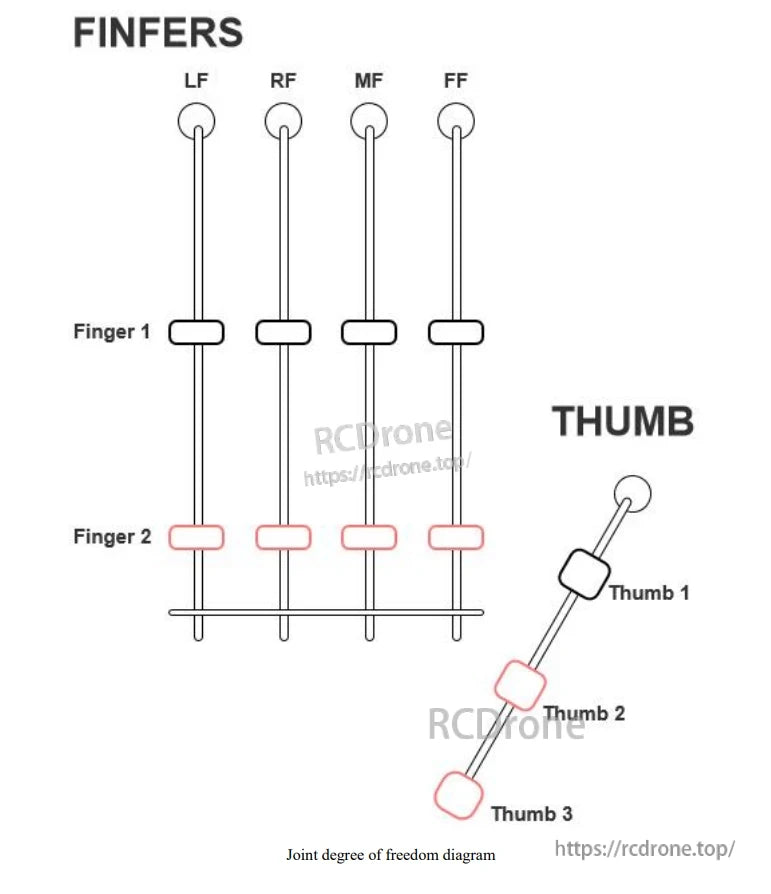
رسم بياني لدرجات حرية مفاصل الأصابع والإبهام
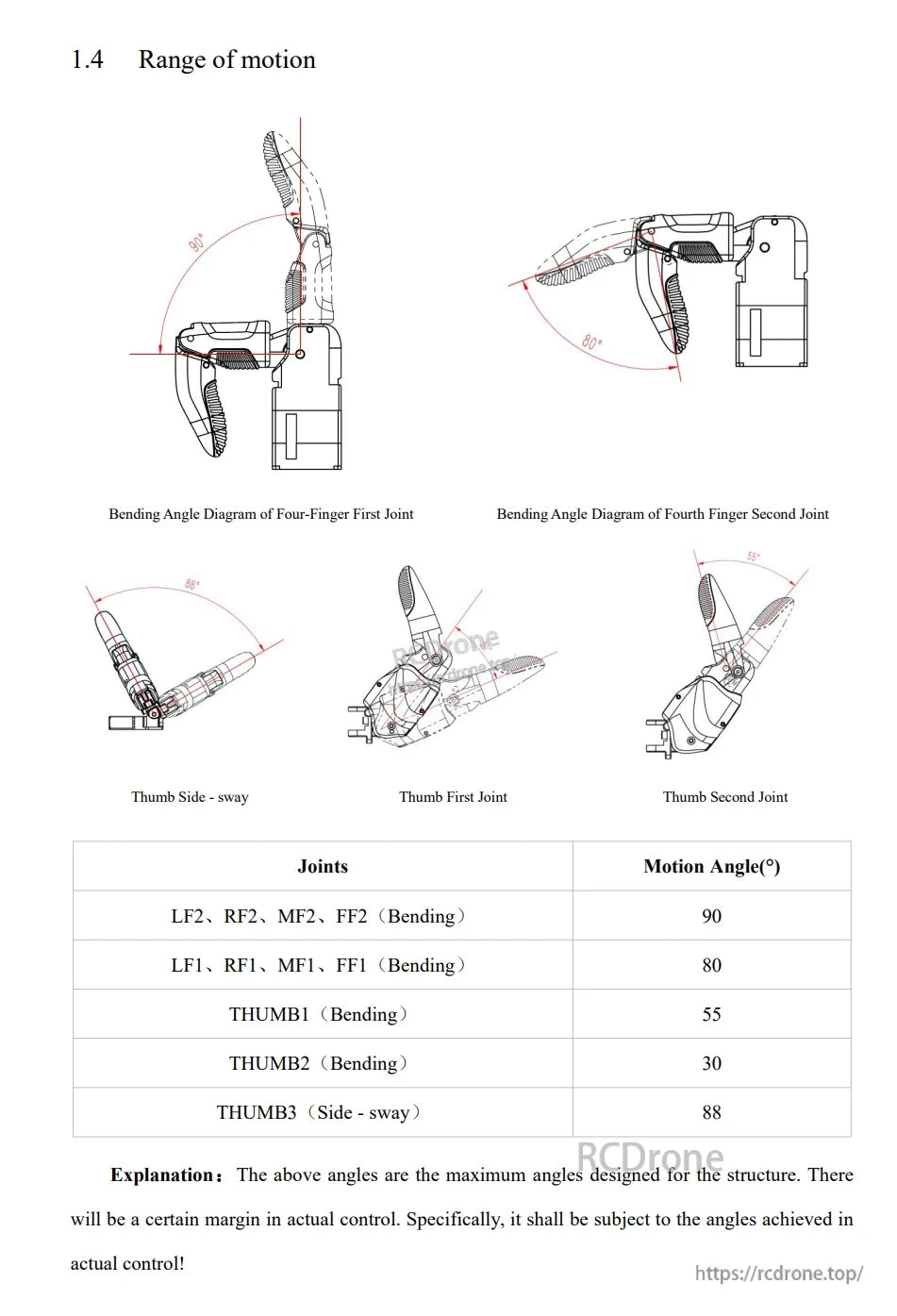
تنحني الأصابع بزاوية 80–90°، وينحني الإبهام بزاوية 30–55°، وتصل حركة الجانبية إلى 88°. هذه هي الزوايا القصوى المصممة؛ قد يختلف التحكم الفعلي قليلاً.
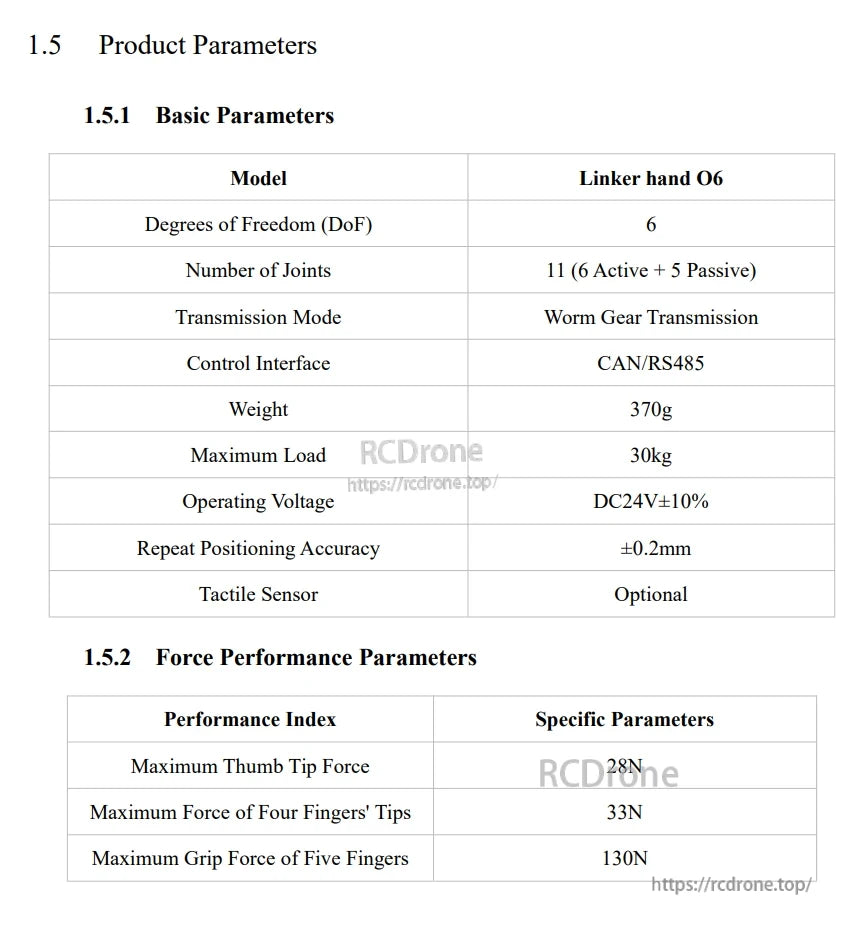
يد الروبوت Linker Hand O6 تحتوي على 6 درجات من الحرية، 11 مفصل، نقل تروس دودية، تحكم CAN/RS485، وزنها 370 جرام، تتحمل حمولة قصوى تبلغ 30 كجم، تعمل بجهد DC24V±10%، بدقة ±0.2 مم، وتقدم مستشعرات لمسية اختيارية مع أداء قوة محدد.

قائمة الملحقات لتركيب اليد المرنة: كابل USB إلى CAN، موصل XT30، محول طاقة، وكابل طاقة - جميع الكميات واحدة.
Related Collections







