




محرك LKMTECH MG4010E-i10-V3 بجهد 24 فولت، 320 دورة/دقيقة، 2.5 نيوتن.متر، مخفض تروس كوكبي 1:10، مشفر RS485/CAN
محرك LKMTECH MG4010E-i10-V3 بجهد 24 فولت، 320 دورة/دقيقة، 2.5 نيوتن.متر، مخفض تروس كوكبي 1:10، مشفر RS485/CAN
LKMTECH
تعذر تحميل توفر الالتقاط
نظرة عامة
محرك LKMTECH MG4010E-i10-V3 هو محرك بلا فرش محرك مزود بمخفض تروس كوكبي ومشفرات مغناطيسية مطلقة، مصمم لمحركات الروبوت والأتمتة التي تتطلب دقة عالية، وعزم دوران كبير، وتحكم مغلق مستقر. يدعم الاتصال عبر RS485 أو CAN bus ويعمل مع محرك DG40E الموصى به (جهد الإدخال 7.4-32V).
الميزات الرئيسية
- تصميم عالي الجودة؛ طاقة عالية، عزم دوران كبير، دقة عالية
- محرك بدون فرشاة عالي الطاقة + مخفض تروس كوكبي عالي الدقة
- تحكم FOC عالي الأداء (ميزة متعلقة بالقيادة)
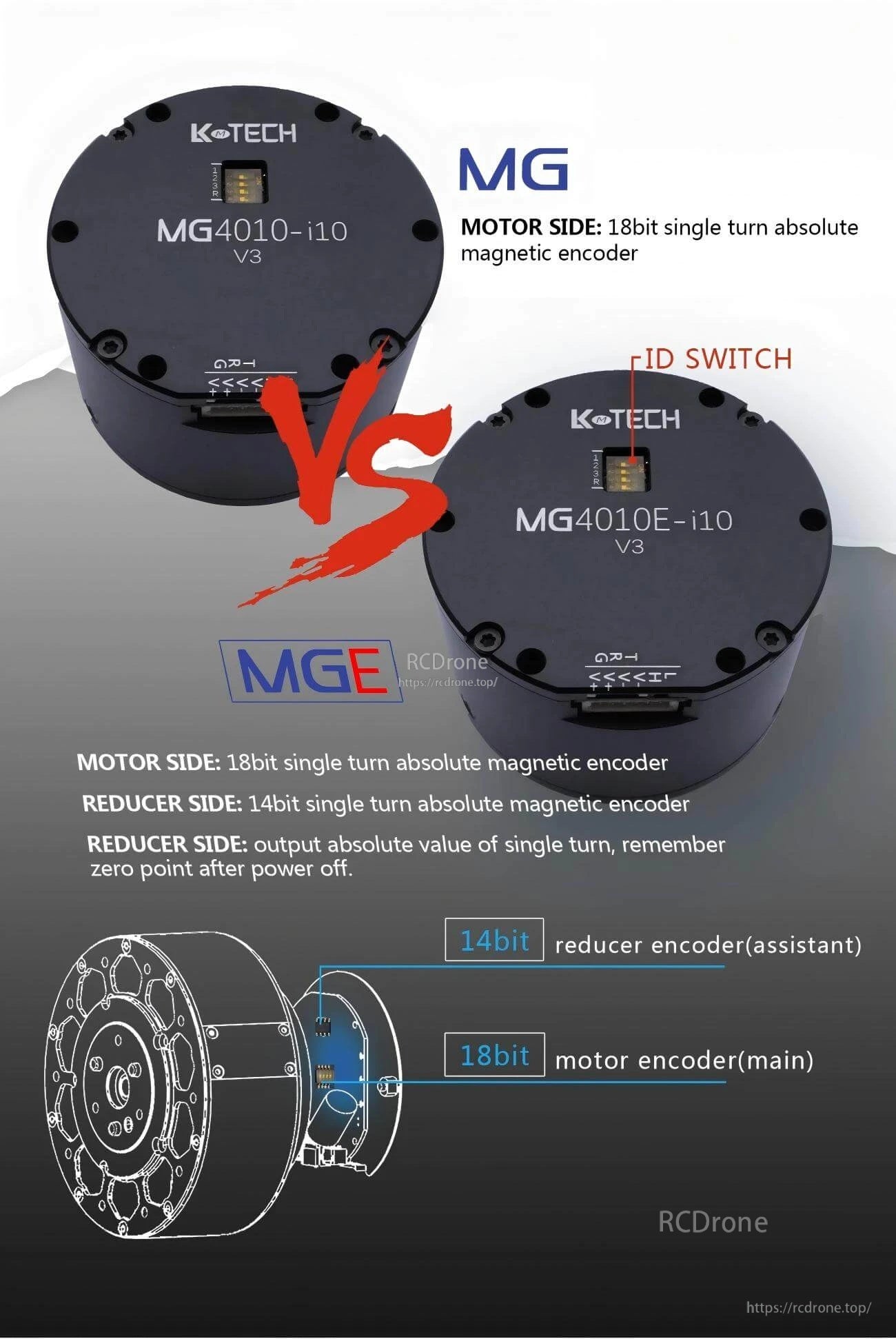
- مشفّرات مزدوجة؛ تتذكر نقطة الصفر بعد إيقاف التشغيل (إخراج القيمة المطلقة للدوران الفردي)
- مشفّر جانب المحرك: مشفّر مغناطيسي مطلق بدقة 18 بت للدوران الفردي
- مشفّر جانب المخفض: مشفّر مغناطيسي مطلق بدقة 14 بت للدوران الفردي
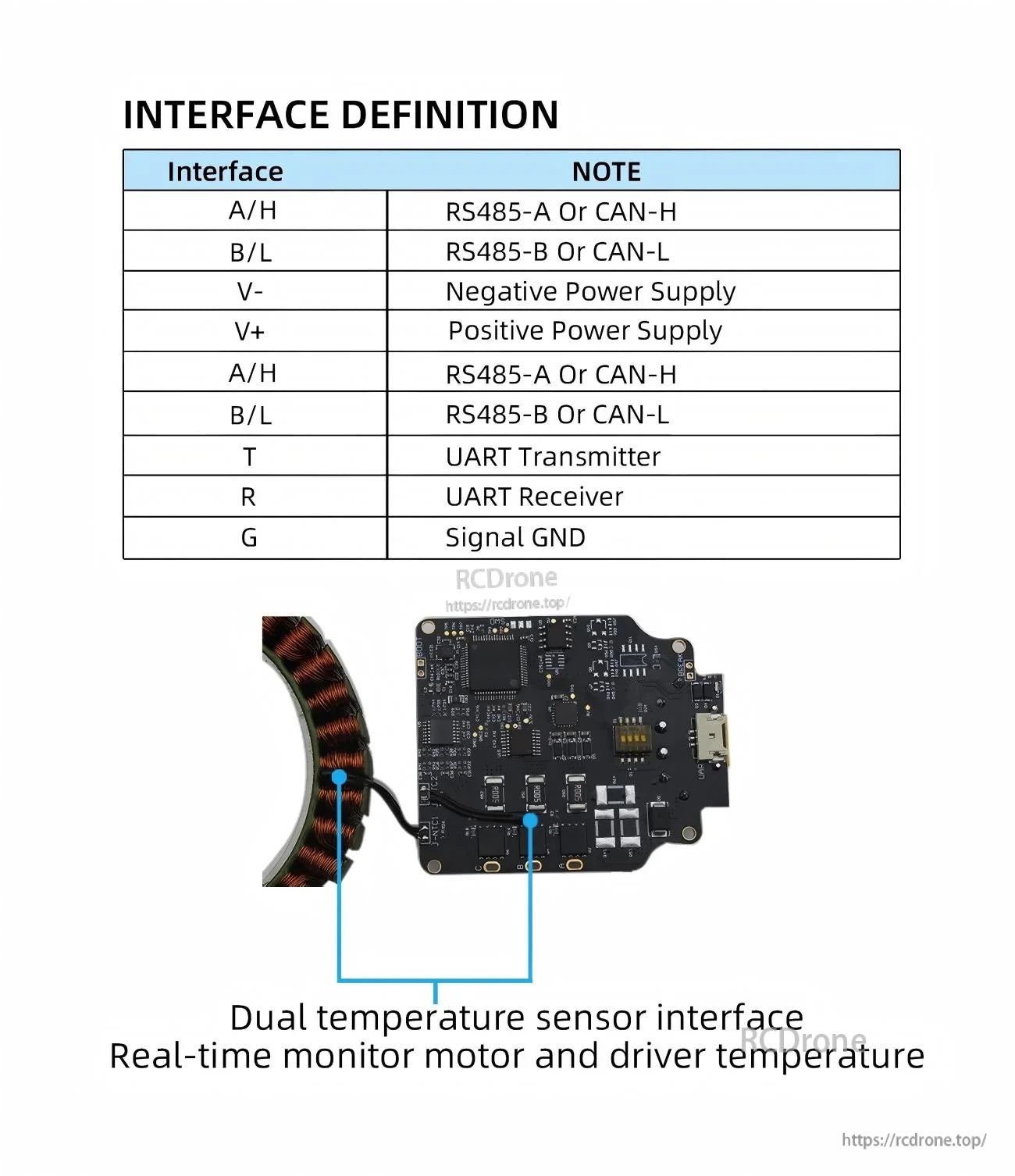
- واجهة مستشعر درجة حرارة مزدوجة لمراقبة درجة حرارة المحرك والسائق في الوقت الحقيقي (درجة حرارة المحرك: نعم)
- مفتاح التعريف (موجود على غلاف المحرك)
المواصفات
| اسم العنصر | MG4010E-i10-V3 |
| الجهد المقدر | 24 فولت |
| السرعة القصوى | 320 دورة في الدقيقة |
| السرعة المقدرة | 260 دورة في الدقيقة |
| عزم الدوران المصنف | 2.5N.m |
| عزم الدوران الأقصى | 4.5N.m |
| التيار المقنن | 3.5A |
| الطاقة القصوى | 140W |
| ثابت السرعة | 108.3rpm/V |
| ثابت العزم | 0.07N.m/A |
| الدورات | 14 |
| نوع اللف | Y |
| مقاومة الطور | 0.604Ω |
| محاثة الطور | 0.28مH |
| أقطاب المحرك | 28 |
| عزم دوران الروتور | 202غ/cm² |
| درجة حرارة المحرك | نعم |
| نوع المخفض | PG4210 |
| نسبة التخفيض | 1:10 |
| الرجوع | ≤8 دقيقة قوسية (نص الصورة أيضًا يذكر: رجوع التروس 6 دقيقة قوسية) |
| حمولة المحمل المقدرة | 1000N |
| وزن المحرك | 250غ |
| الحجم | Φ53*41 |
| يوصى بمحرك | DG40E |
| جهد إدخال المحرك | 7.4-32V |
| الاتصال | RS485 أو CAN |
| تردد الاتصال | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| المشفر | 18بت(محرك)+14بت(مخفض) مشفر مغناطيسي |
| معدل باود المشفر (RS485) | 9600، 19200، 57600، 115200، 230400، 406800، 1M، 2Mbps |
| معدل باود (CAN) | 100K، 125K، 250K، 500K، 1M |
| وضع التحكم | حلقة العزم(24KHz)/حلقة السرعة(8KHz)/حلقة الموضع(4KHz) |
| منحنى التسارع | تسارع شبه منحرف |
تعريف الواجهة
| A/H | RS485-A أو CAN-H |
| B/L | RS485-B أو CAN-L |
| V- | مزود الطاقة السالب |
| V+ | مزود الطاقة الإيجابي |
| A/H | RS485-A أو CAN-H |
| B/L | RS485-B أو CAN-L |
| T | مرسل UART |
| R | مستقبل UART |
| G | إشارة GND |
سيناريوهات التطبيق
- الروبوتات البشرية
- الأذرع الروبوتية
- الهياكل الخارجية
- الروبوتات رباعية الأرجل
- سيارات AGV / سيارة AGV
- روبوتات ARU
- كلب روبوتي
- روبوت قابل للارتداء
لأسئلة التكامل (إعدادات RS485/CAN، اختيار معدل باود للترميز، أو مطابقة المحرك)، اتصل بـ [email protected] or زيارة https://rcdrone.top/.
الكتيبات
التفاصيل

مصمم لمحركات الروبوتات التي تحتاج إلى عزم دوران عالي، دقة عالية، وتحكم مغلق مستقر.

يدعم الاتصال عبر RS485 أو CAN bus التكامل المرن مع وحدات التحكم والمحركات الشائعة للروبوتات.
تساعد المشفرات المطلقة المزدوجة (المحرك + المخفض) في الاحتفاظ بنقطة الصفر بعد انقطاع الطاقة لتحقيق موضع متكرر.
تسهل تعريفات الدبابيس توصيل الطاقة واختيار الاتصال عبر RS485/CAN أثناء التكامل.

المخفض الكوكبي 1:10 مُحسّن لإنتاج عزم دوران مدمج في المساحات الضيقة للمشغلات.
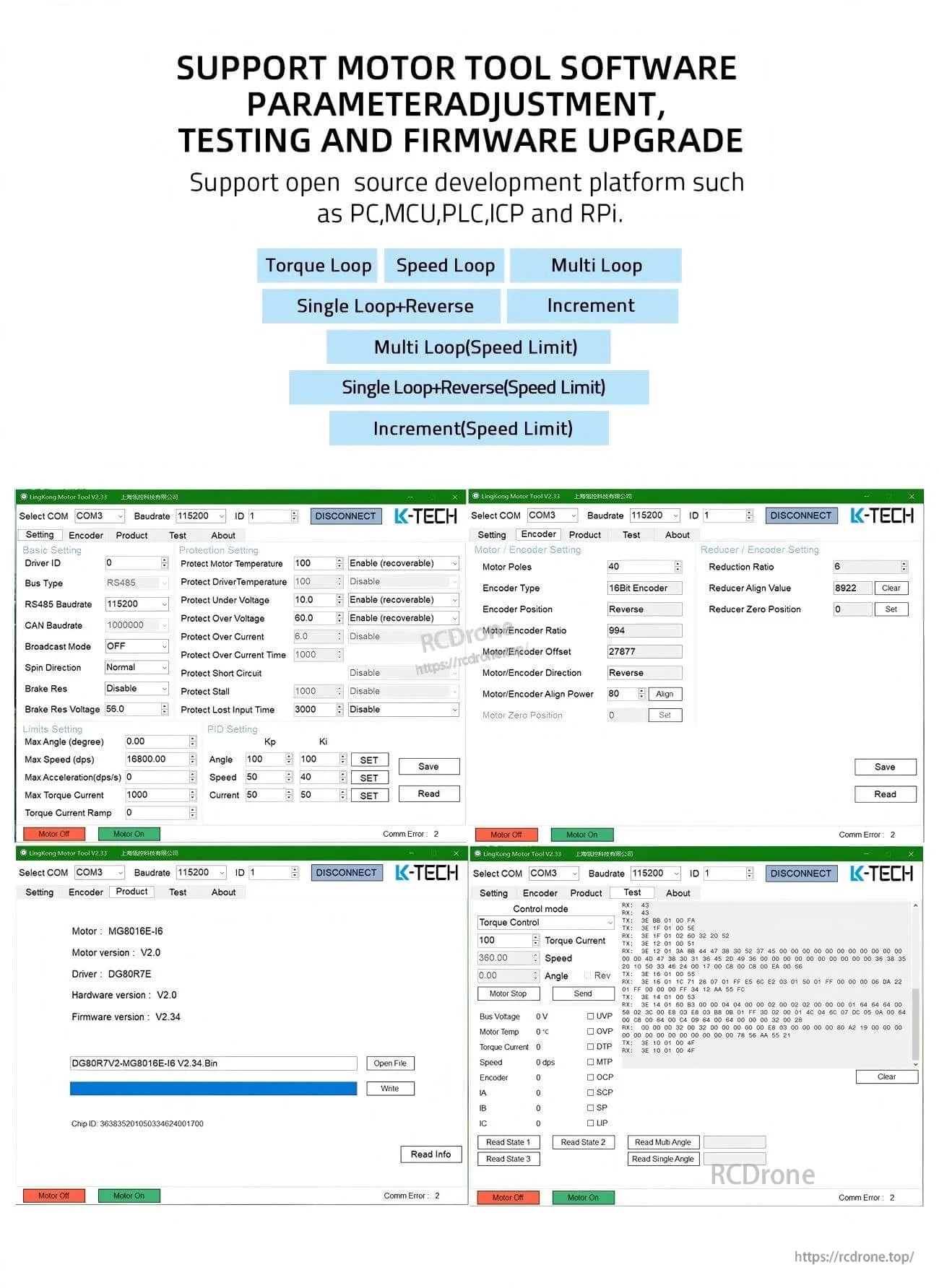
يدعم برنامج أدوات الكمبيوتر ضبط المعلمات، اختبار الوظائف، وترقيات البرنامج الثابت أثناء التشغيل.
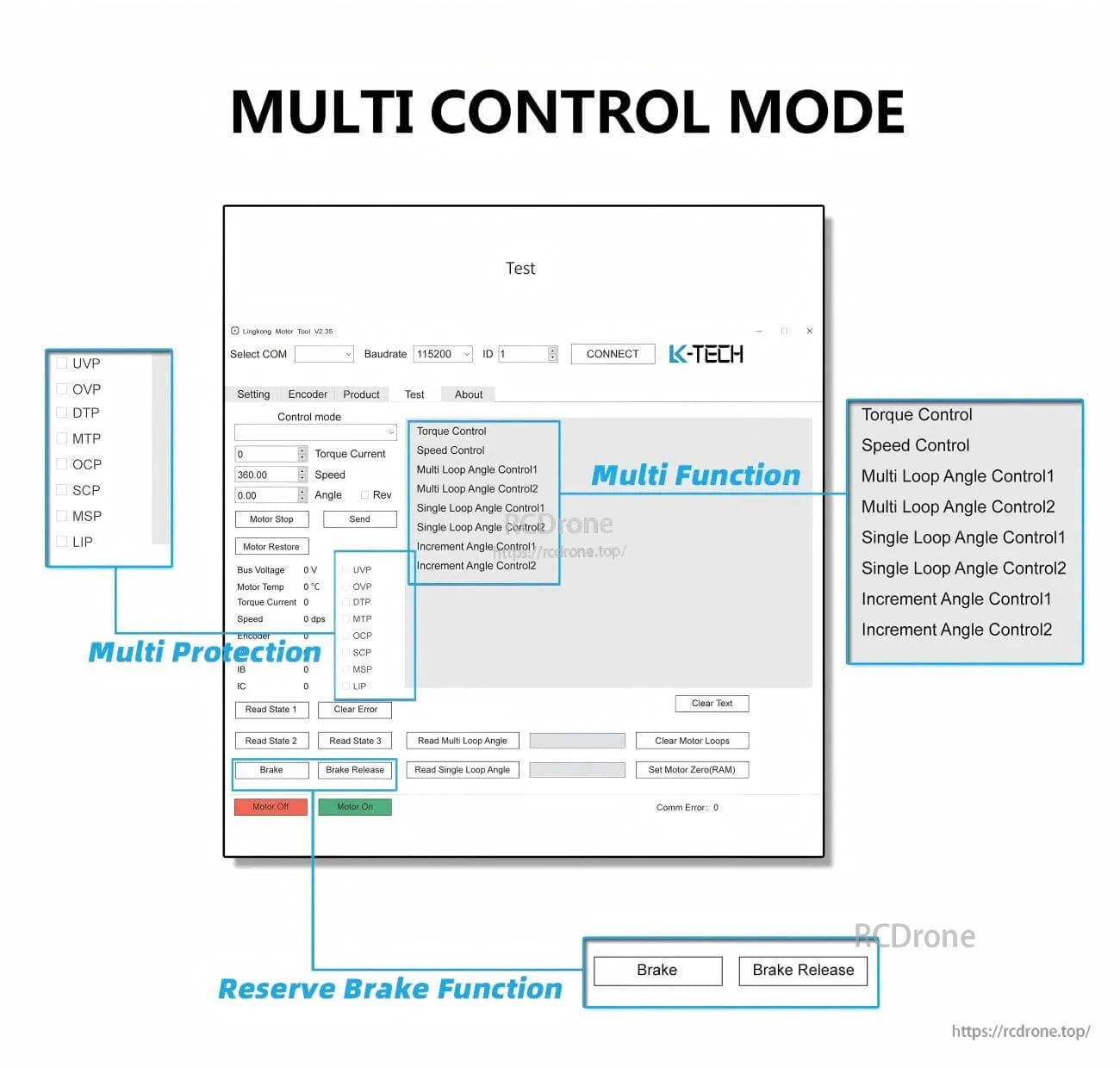
تدعم أوضاع التحكم المتعددة وخيارات الحماية تدفقات العمل الخاصة بالعزم والسرعة والموقع.
مناسب للسيارات ذاتية القيادة، وأذرع الروبوت، والرباعيات، ومفاصل الروبوت القابلة للارتداء حيث يتطلب الأمر تروس دقيقة وتعليقات.
Related Collections




