




محرك تروس كوكبي LKMTECH MG4010E-i36-V3 بجهد 24 فولت 1:36 مع مشفر مغناطيسي RS485/CAN للروبوتات
محرك تروس كوكبي LKMTECH MG4010E-i36-V3 بجهد 24 فولت 1:36 مع مشفر مغناطيسي RS485/CAN للروبوتات
LKMTECH
تعذر تحميل توفر الالتقاط
نظرة عامة
محرك LKMTECH MG4010E-i36-V3 هو محرك تروس كوكبي مصمم للروبوتات ومحركات التحكم في الحركة. يجمع بين محرك بدون فرش، ومخفض كوكبي، ومشفر مغناطيسي، مع خيارات الاتصال المدرجة كـ RS485 أو CAN.
الميزات الرئيسية
- محرك تروس كوكبي (MG4010E-i36، V3).
- نسبة التروس: 1:36 (تظهر أيضًا كـ "نسبة التروس 1:36").
- تراجع التروس: 7 دقيقة قوس (تسمية الصورة) / 12 دقيقة قوس (جدول المواصفات).
- المشفر: مشفر مغناطيسي مطلق بدقة 18 بت لدورة واحدة (نص الصورة)؛ مدرج أيضًا كـ 18 بت (محرك) + 14 بت (مخفض) مشفر مغناطيسي (جدول المواصفات).
- الاتصال: RS485 أو CAN.
- محرك/سائق FOC مرجعي (نص الصورة: "سائق FOC عالي الأداء").
- فرامل مدمجة (نص الصورة/تسمية واجهة المستخدم).
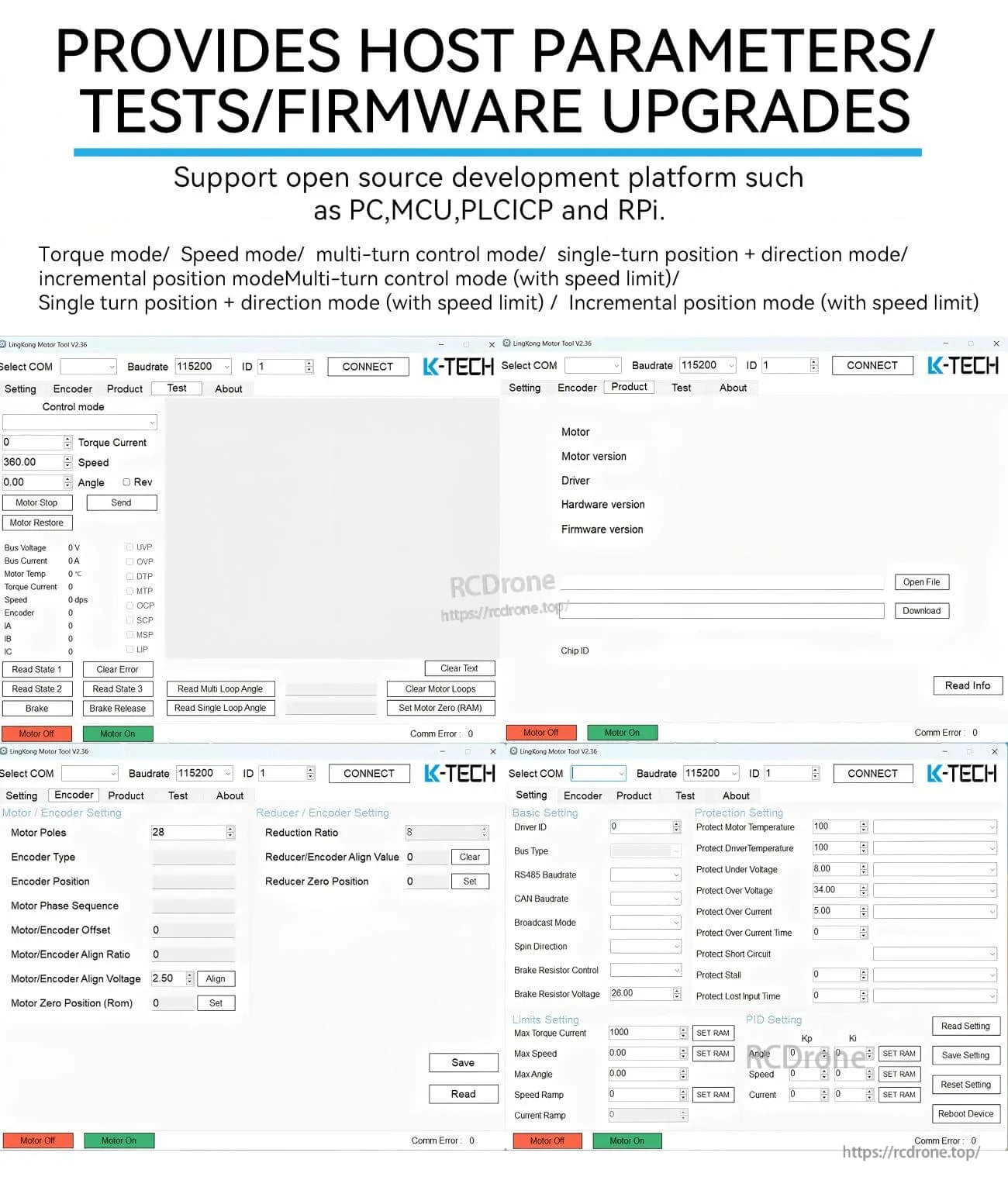
- معلمات المضيف/اختبارات/ترقيات البرنامج الثابت مدعومة (نص الصورة).
المواصفات
| اسم العنصر | MG4010E-i36-V3 |
| الجهد المقنن | 24V |
| السرعة القصوى | 90RPM |
| السرعة المقننة | 77RPM |
| التيار المقنن | 2.4A |
| الطاقة القصوى | 132W |
| عزم الدوران المقنن | 6 N.m (جدول المواصفات) / 9 N.m (تسمية الصورة) |
| عزم الدوران الأقصى | 13 N.m (جدول المواصفات) / 18 N.m (تسمية الصورة) |
| ثابت السرعة | 3 rpm/V |
| ثابت العزم | 2.58 N.m/A |
| الدورات | 14 |
| نوع اللف | Y |
| مقاومة الطور | 0.68 Ω |
| محاثة الطور | 0.25 مH |
| أقطاب المحرك | 28 |
| عزم دوران الروتور | 158 غم.سم² |
| درجة حرارة المحرك | نعم |
| نوع المخفض | PG5336 |
| نسبة التخفيض | 1:36 |
| الخلخلة | ≤12 دقيقة قوسية (جدول المواصفات) / 6 دقيقة قوسية (ملصق الصورة) |
| حمولة المحمل المقدرة | 1120 نيوتن |
| وزن المحرك | 378 غم |
| القيادة الموصى بها | DG40E |
| جهد إدخال القيادة | 12-24 فولت (جدول المواصفات) / 12-60 فولت (ملصق الصورة) |
| الاتصال | RS485 أو CAN |
| تردد الاتصال | RS485: 500 هرتز (115200 بت في الثانية) / CAN: 2 كيلوهرتز (1 ميغابت في الثانية) |
| المشفر | 18bit (محرك) + 14bit (مخفض) مشفر مغناطيسي |
| معدل باود للمشفر (RS485) | 9600، 19200، 57600، 115200، 230400، 406800، 1M، 2 Mbps |
| معدل باود (CAN) | 100K، 125K، 250K، 500K، 1M |
| وضع التحكم | حلقة العزم (24 كيلوهرتز) / حلقة السرعة (8 كيلوهرتز) / حلقة الموضع (4 كيلوهرتز) |
| منحنى التسارع | تسارع شبه منحرف |
| حجم المحرك | Φ 53*54.5 (تسمية الصورة) |
تعريف الواجهة
- مفتاح التعريف (تسمية الصورة: "مفتاح التعريف").
| ميناء | تعليمات |
|---|---|
| A/H | RS485-A أو CAN-H |
| B/L | RS485-B أو CAN-L |
| V- | مزود الطاقة السالب |
| V+ | مزود الطاقة الموجب |
| T | مرسل UART |
| R | مستقبل UART |
| G | إشارة GND |
سيناريوهات التطبيق
- روبوتات بشرية
- أذرع روبوتية
- هياكل خارجية
- روبوتات رباعية الأرجل
- مركبات AGV / سيارة AGV
- روبوتات ARU
- كلب ميكانيكي
- روبوت خدمة
- ليدار محمول
- روبوت تدريب إعادة التأهيل
- روبوت تفتيش
تحكم & ملاحظات البرمجيات
- يدعم منصات تطوير مفتوحة المصدر مثل الكمبيوتر الشخصي، ووحدة التحكم الدقيقة، ووحدة التحكم المنطقية القابلة للبرمجة، وICP، وRPi.
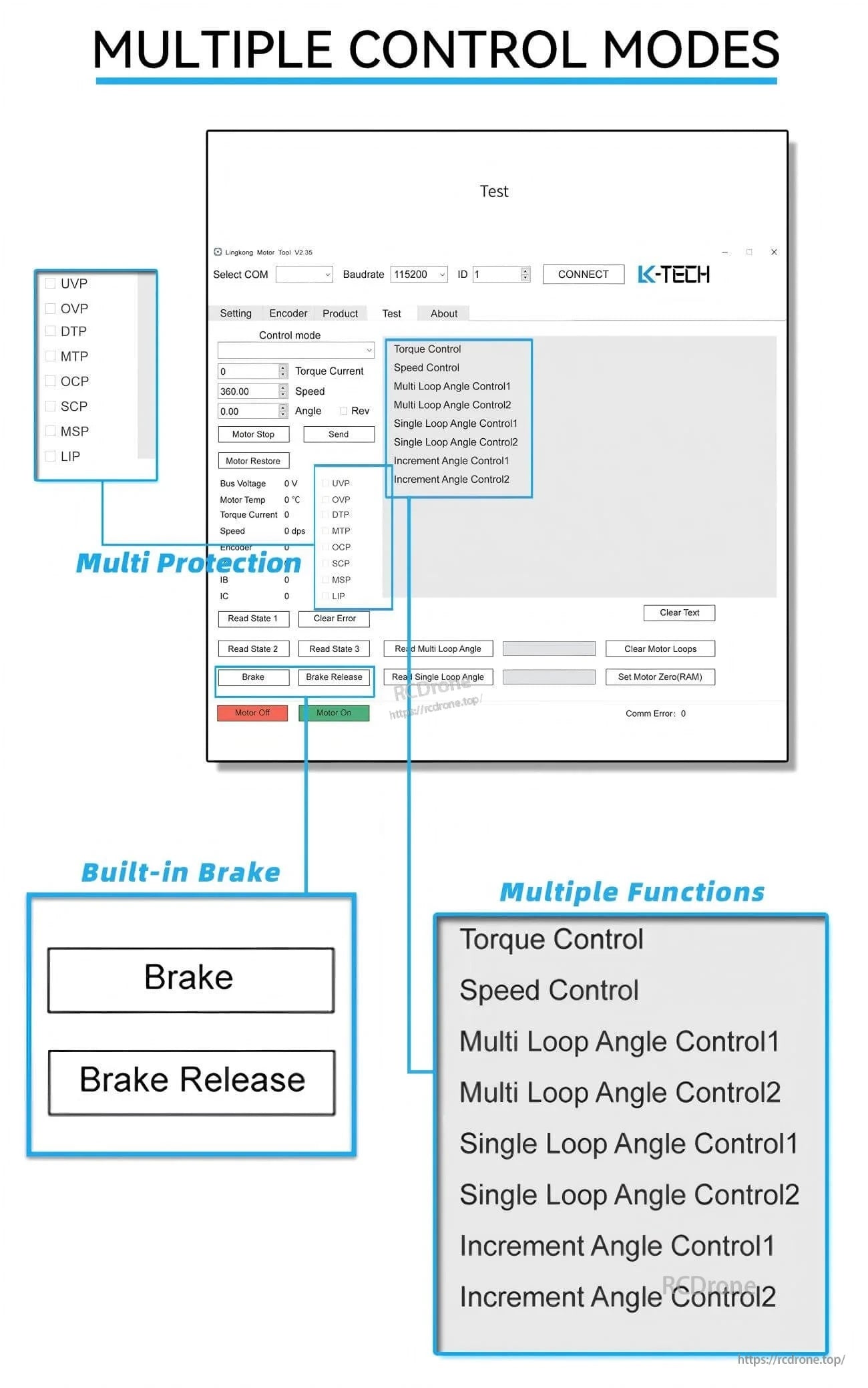
- أنماط مدرجة (نص الصورة): وضع العزم، وضع السرعة، وضع التحكم متعدد الدورات، وضع الموضع + الاتجاه للدورة الواحدة، وضع الموضع المتزايد؛ كما تظهر النسخ ذات حد السرعة.
- أنماط التحكم المتعددة المعروضة في واجهة المستخدم: التحكم في العزم، التحكم في السرعة، التحكم في زاوية الحلقة المتعددة1، التحكم في زاوية الحلقة المتعددة2، التحكم في زاوية الحلقة الواحدة1، التحكم في زاوية الحلقة الواحدة2، التحكم في الزاوية المتزايدة1، التحكم في الزاوية المتزايدة2.
- تسميات الحماية المتعددة المعروضة: UVP، OVP، DTP، MTP، OCP، SCP، MSP، LIP.
- التحكم في المكابح المدمجة المعروضة: المكابح، تحرير المكابح.
لإجراء فحوصات التوافق قبل البيع (تكامل RS485/CAN، اختيار معدل البود) أو مساعدة في الوصول إلى الملفات، اتصل بـ [email protected] or زيارة https://rcdrone.top/.
الكتيبات / الوثائق
التفاصيل

يجمع MG4010E-i36-V3 بين محرك بدون فرش، ومخفض كوكبي، ومشفر مغناطيسي لمشغلات روبوتية مدمجة.
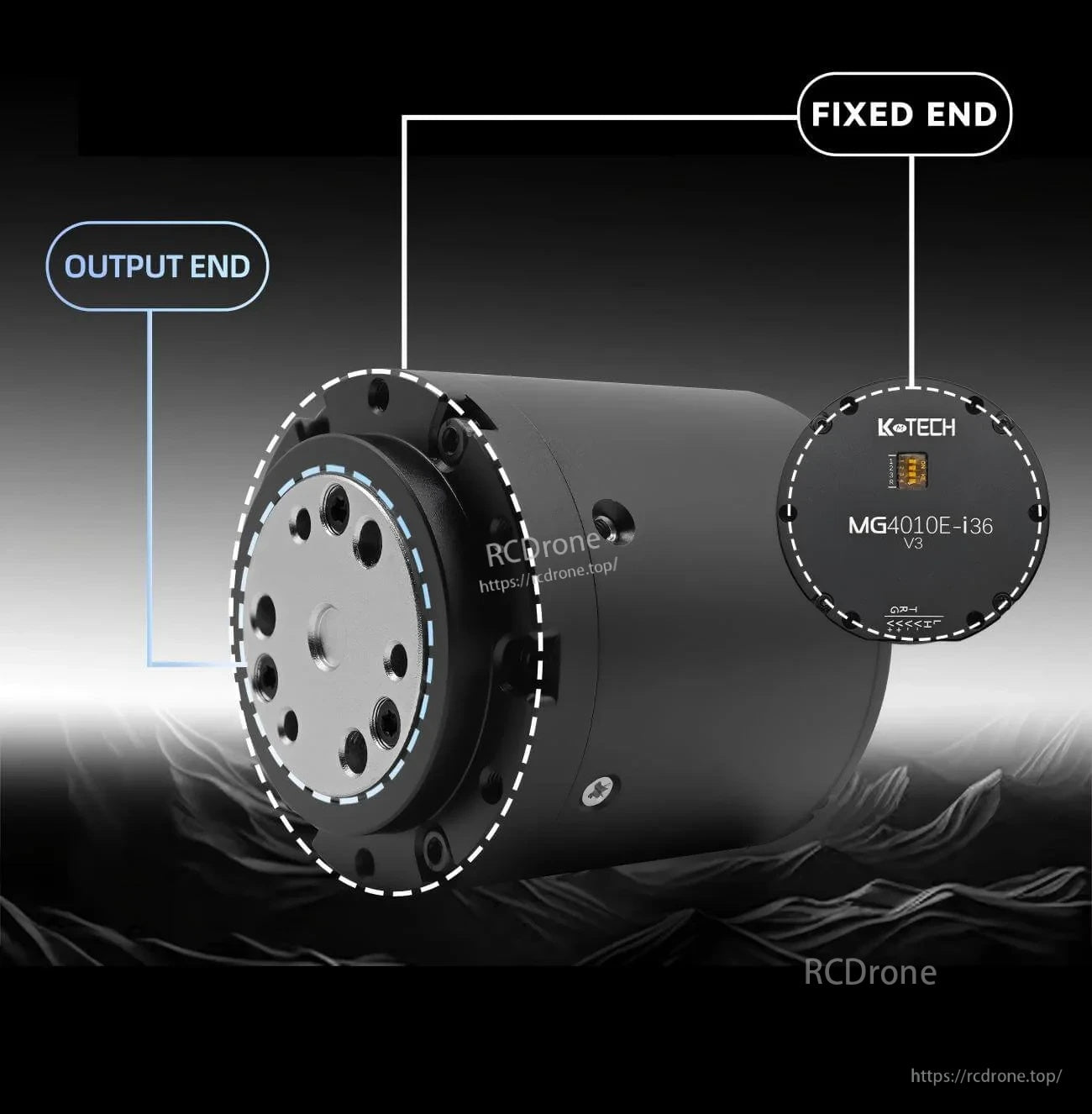
يُسهل تصميم النهاية الخارجية على شكل فلانش وتخطيط النهاية الثابتة التكامل في الأذرع، والساقين، ووحدات المفاصل الأخرى.

تتوافق اتصالات RS485 أو CAN مع سائق FOC وتغذية راجعة لمشفر مغناطيسي مطلق من أجل التحكم المستقر في العزم، والسرعة، والموقع.
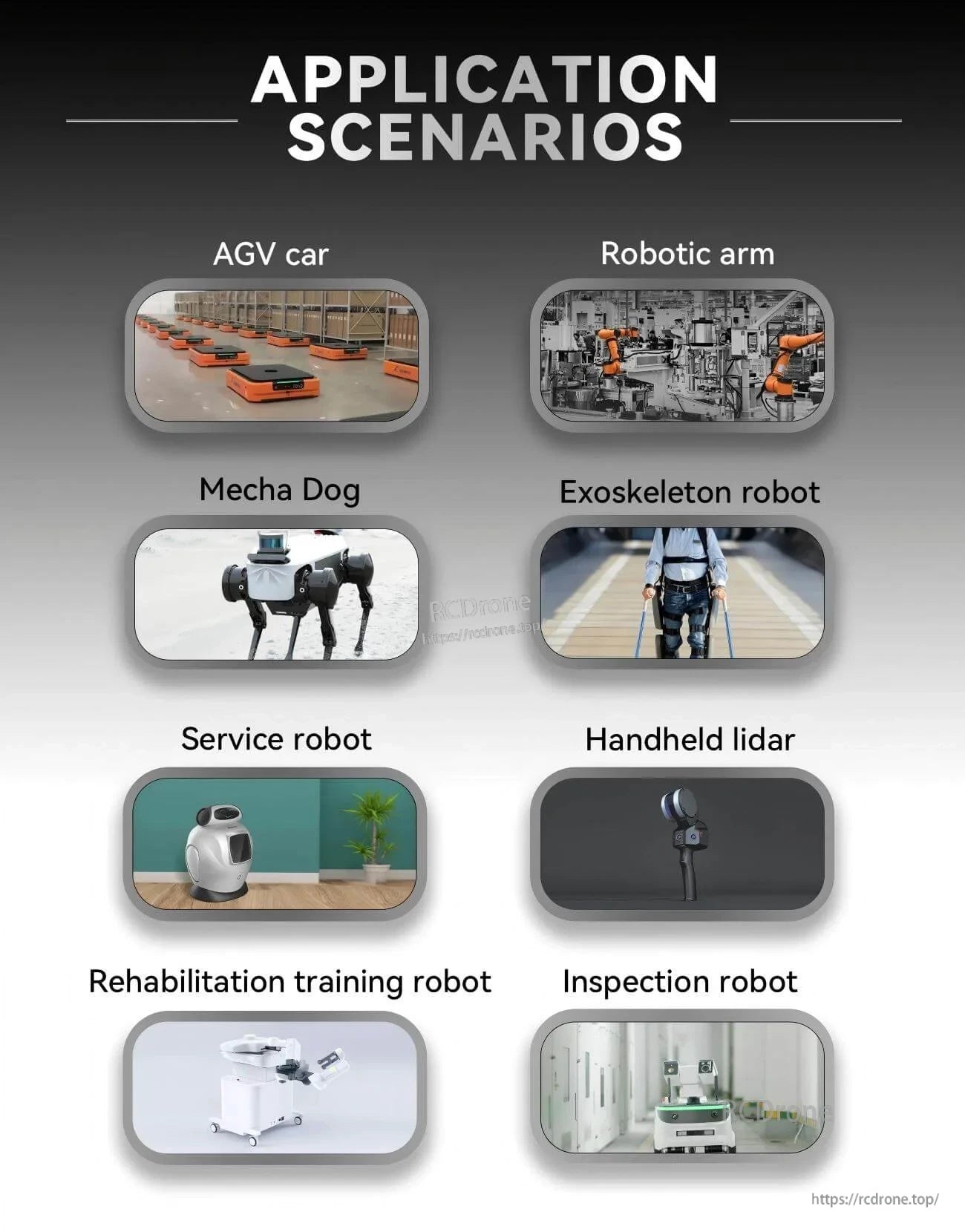
تشمل حالات الاستخدام الشائعة المركبات ذاتية القيادة، والأذرع الروبوتية، ومنصات رباعية الأرجل، والهياكل الخارجية، والروبوتات الخاصة بالفحص أو الخدمة.
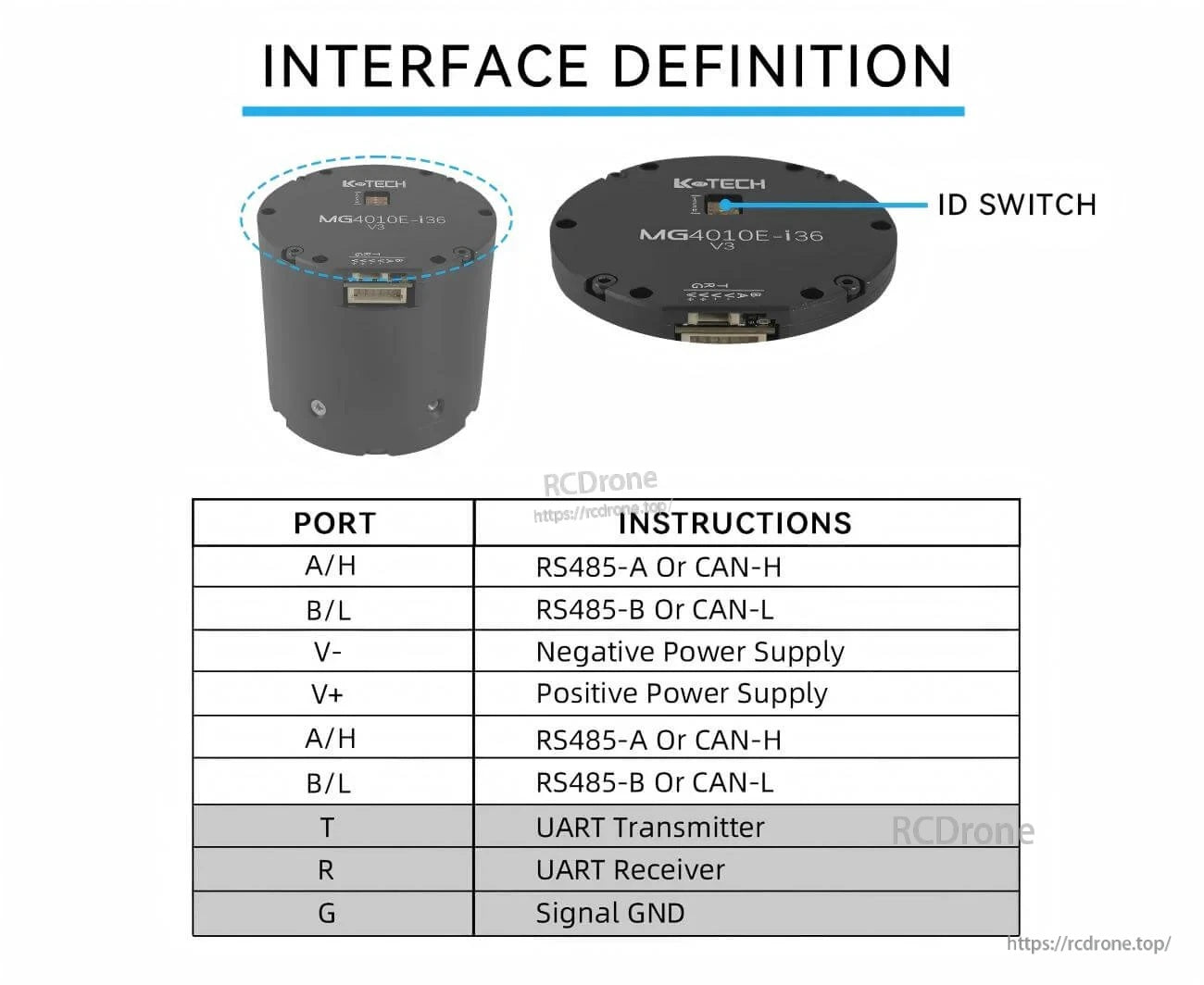
تم تبسيط التوصيلات مع دبابيس حافلة RS485/CAN المسمى، واتصالات الطاقة، وUART Tx/Rx، والأرضية الإشارية، ومفتاح تعريف مدمج.
تساعد أنظمة التحكم في الفرامل المدمجة وأنماط التشغيل المتعددة في ضبط السلوك لمهام التحكم في الحركة المختلفة ومتطلبات السلامة.
Related Collections




