




محرك LKMTECH MG6012-i36-V3 بجهد 24V/48V وعزم 25N.m مع مخفض كوكبي 1:36، RS485/CAN، مشفر 18 بت
محرك LKMTECH MG6012-i36-V3 بجهد 24V/48V وعزم 25N.m مع مخفض كوكبي 1:36، RS485/CAN، مشفر 18 بت
LKMTECH
تعذر تحميل توفر الالتقاط
نظرة عامة
سيناريوهات التطبيق
- روبوتات بشرية
- أذرع روبوتية
- هياكل خارجية
- روبوتات رباعية الأرجل
- مركبات AGV / سيارة AGV
- روبوتات ARU
- كلب روبوتي
- روبوت قابل للارتداء
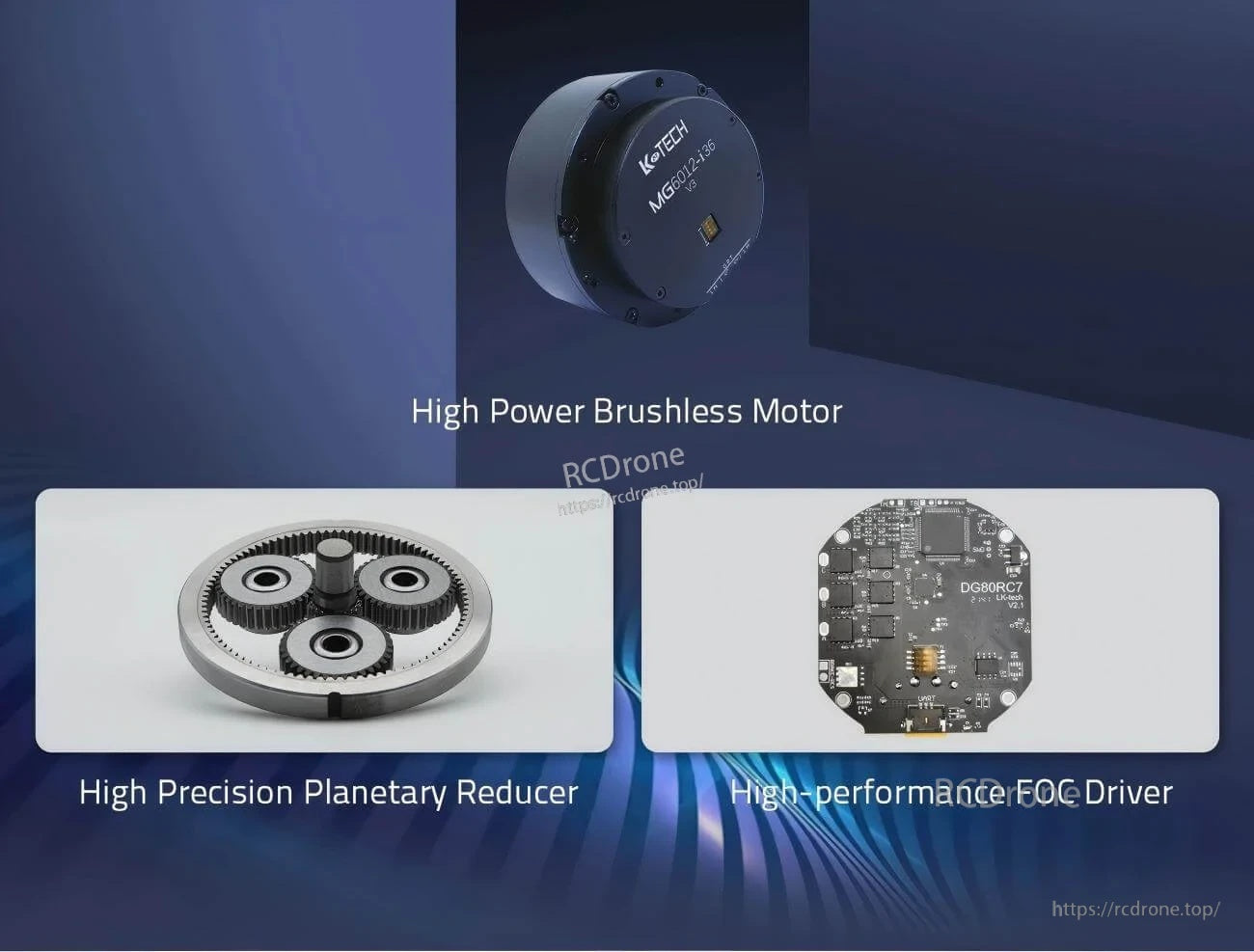
الميزات الرئيسية
- محرك بدون فرش عالي القوة
- مخفض كوكبي عالي الدقة
- سائق FOC عالي الأداء (مرجع نصي)
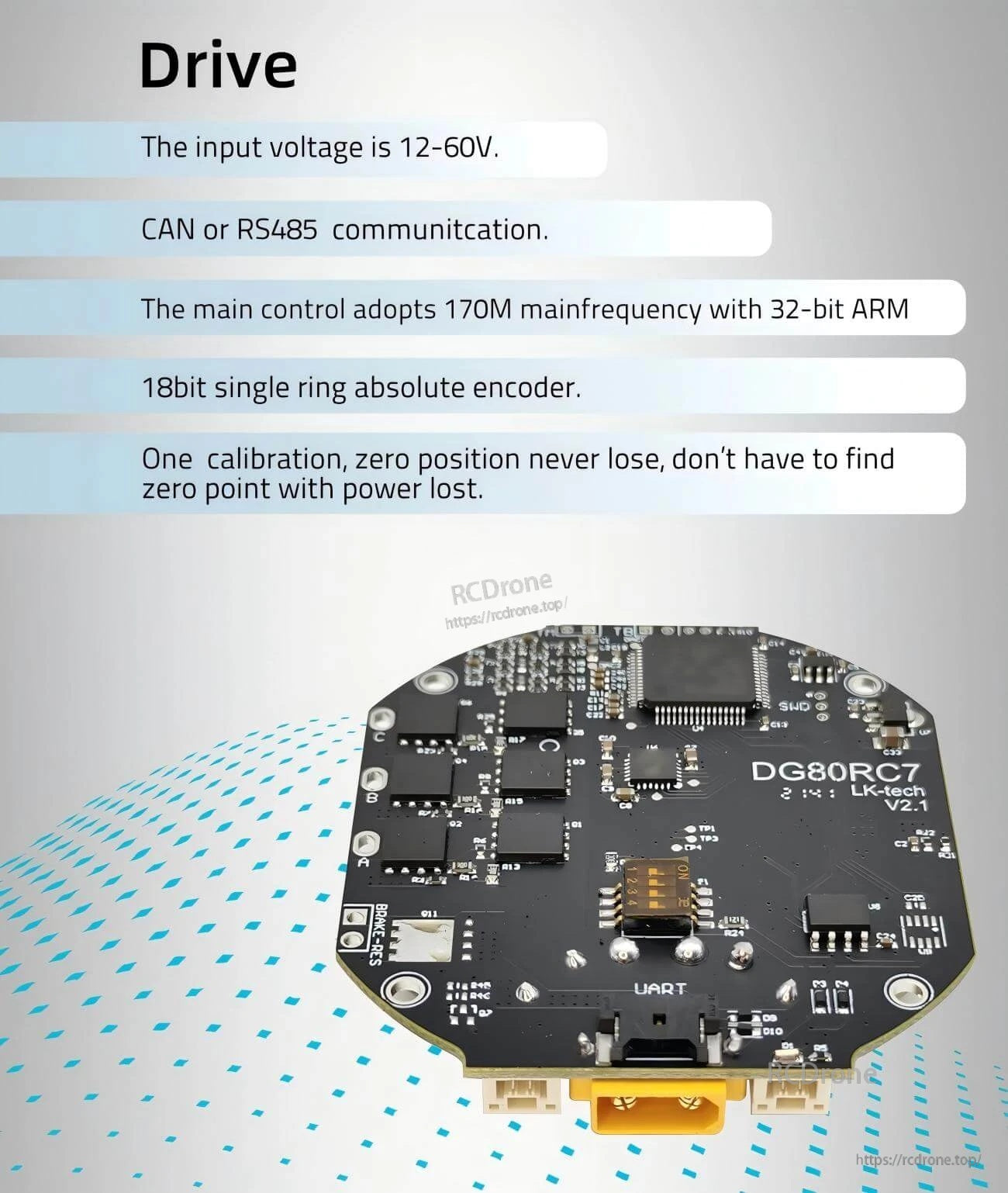
- جهد إدخال القيادة: 12-60 فولت
- الاتصال: CAN أو RS485
- التحكم الرئيسي: تردد رئيسي 170 ميجاهرتز مع ARM 32 بت (مرجع نصي)
- مشفّر: مشفّر مطلق حلقة واحدة 18 بت / مشفّر مغناطيسي 18 بت (كلاهما مذكور)
- “معايرة واحدة، موضع صفر لا يفقد أبداً، لا داعي للبحث عن نقطة الصفر عند فقدان الطاقة.” (مذكور)
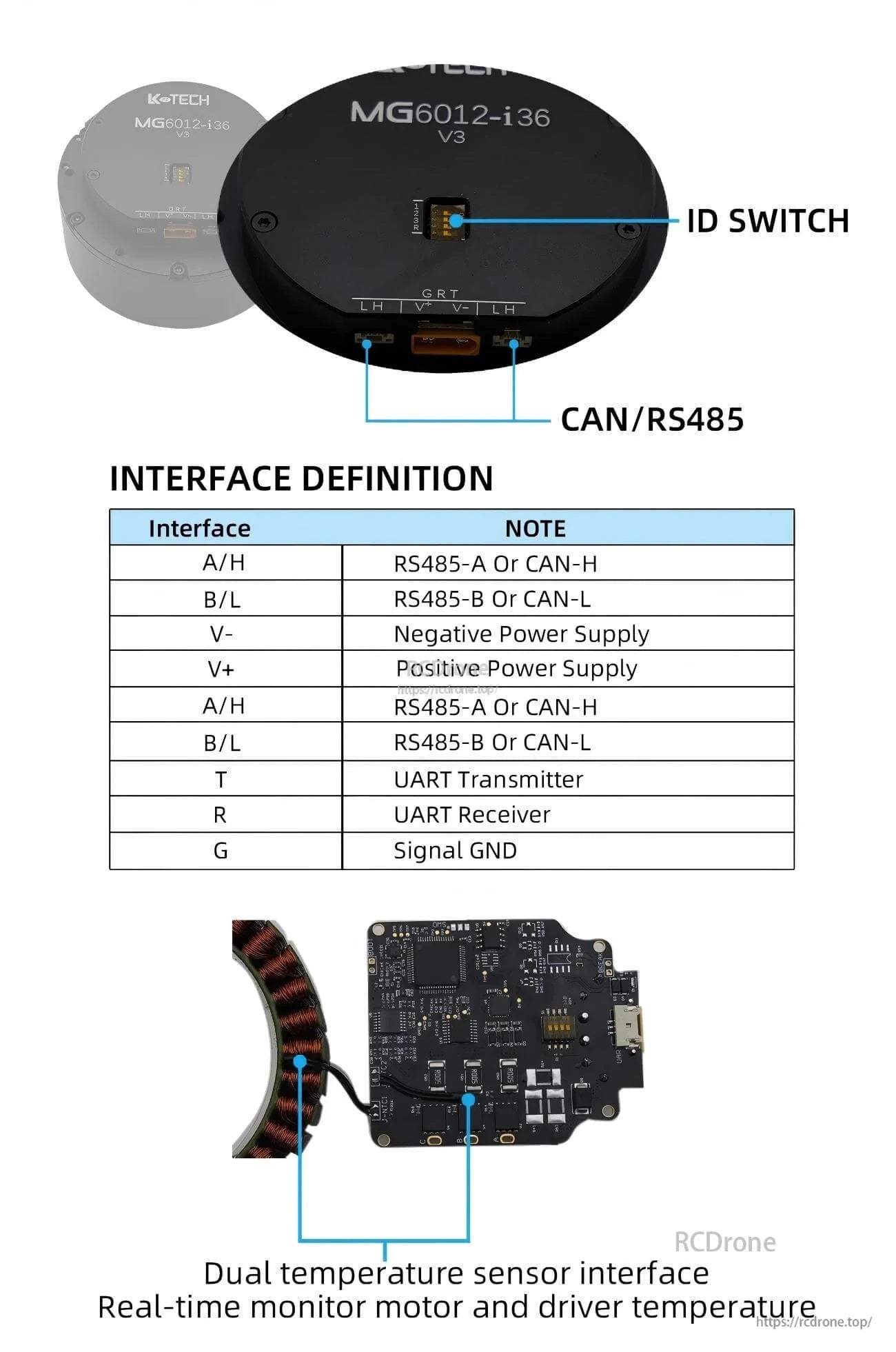
- تبديل الهوية (مذكور)
- واجهة مستشعر درجة الحرارة المزدوجة؛ مراقبة درجة حرارة المحرك والسائق في الوقت الحقيقي (مذكور)
المواصفات
| المعلمة | نسخة 24 فولت | نسخة 48 فولت |
|---|---|---|
| اسم العنصر | MG6012-i36-V3 | MG6012-i36-V3 |
| الجهد المقدر | 24 فولت | 48 فولت |
| السرعة القصوى | 45 دورة في الدقيقة | 88 دورة في الدقيقة |
| عزم الدوران المقدر | 25 نيوتن.م | 25 نيوتن.م |
| السرعة المقدرة | 45 دورة في الدقيقة | 74 دورة في الدقيقة |
| التيار المقدر | 4 أمبير | 4.8 أمبير |
| الطاقة القصوى | 140 واط | 500 واط |
| عزم الدوران الأقصى | 40 نيوتن.م | 40 نيوتن. |
| ثابت السرعة | 67 دورة في الدقيقة/فولت | 67 دورة في الدقيقة/فولت |
| ثابت العزم | 0.175 نيوتن.متر/أمبير | 0.146 نيوتن.متر/أمبير |
| الدورات | 15 | 15 |
| نوع اللف | Y | Y |
| مقاومة الطور | 0.63 أوم | 0.63 أوم |
| محاثة الطور | 0.28 مللي هنري | 0.28مH |
| أقطاب المحرك | 28 | 28 |
| عزم الدوران | 930 | 908 |
| درجة حرارة المحرك | نعم | نعم |
| نوع المخفض | PG4136 | PG4136 |
| نسبة التخفيض | 1:36 | 1:36 |
| الرجوع | ≤12 دقيقة قوسية | ≤12 دقيقة قوسية |
| حمولة المحمل المقدرة | 1770N | 1770N |
| وزن المحرك | 503غ | 503غ |
| توصية القيادة | DG60 | DG60 |
| جهد إدخال القيادة | 12-60فولت | 12-60فولت |
| الاتصال | RS485 أو CAN | RS485 أو CAN | تردد الاتصال | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| المشفر | مشفر مغناطيسي 18 بت | مشفر مغناطيسي 18 بت |
| معدل باود للمشفر (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| معدل باود (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| وضع التحكم | حلقة العزم (32KHz)/حلقة السرعة (8KHz)/حلقة الموضع (4KHz) | حلقة العزم (32KHz)/حلقة السرعة (8KHz)/حلقة الموضع (4KHz) |
| منحنى التسارع | تسارع شبه منحرف | تسارع شبه منحرف |
تعريف الواجهة
تم توفير CAN/RS485 ومفتاح ID (مذكور).ملاحظات الواجهة:
| واجهة | ملاحظة |
|---|---|
| A/H | RS485-A أو CAN-H |
| B/L | RS485-B أو CAN-L |
| V- | مزود الطاقة السالب |
| V+ | مزود الطاقة الموجب |
| T | مرسل UART |
| R | مستقبل UART |
| G | إشارة GND |
الكتيبات / الوثائق
لأسئلة التكامل (إعداد CAN/RS485، اختيار معدل البود، أو اقتران المتحكم)، اتصل بـ [email protected] or زيارة https://rcdrone.top/.
التفاصيل

يتميز MG6012-i36-V3 بدمج محرك بدون فرش محرك, مخفض كوكبي، واتصالات مشفر للوصلات الروبوتية.
نظام دفع مدمج مبني حول نواة محرك عالية القدرة، وتقليل كوكبي دقيق، وسائق FOC.
تدعم إلكترونيات التحكم إدخال 12–60 فولت مع اتصالات CAN أو RS485 بالإضافة إلى خيار مشفر مطلق بدقة 18 بت.
تعريفات دبابيس واضحة ومفتاح تعريف على اللوحة يساعدان في تبسيط الأسلاك وإعدادات CAN/RS485 متعددة العقد.

تم تصميم المخفض الكوكبي 1:36 لتقليل الارتداد العالي وعزم الدوران العالي في تجميعات الحركة الدقيقة.
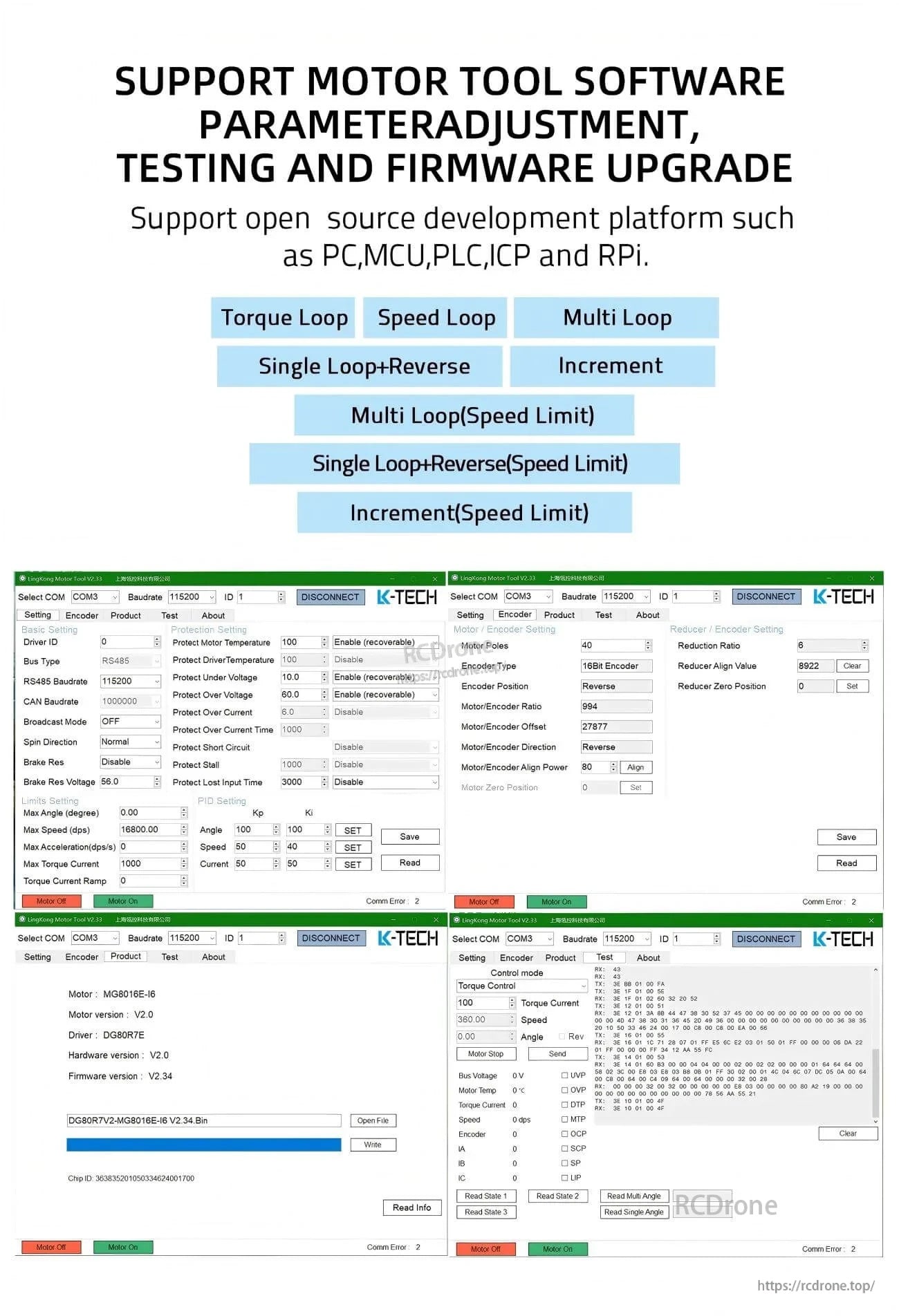
يدعم برنامج التكوين ضبط المعلمات، واختبار وضع الحلقة، وترقيات البرنامج الثابت عبر منصات التطوير الشائعة.
مناسب لتطبيقات الروبوتات مثل AGVs، وأذرع الروبوت، والرباعيات، وآليات قابلة للارتداء/هياكل خارجية.
Related Collections




