لوحة محول Matek AP Periph CAN Node CAN-G474 DroneCAN، STM32G474CE بسعة 512KB، CANFD بسرعة 5 ميجابت/ثانية
لوحة محول Matek AP Periph CAN Node CAN-G474 DroneCAN، STM32G474CE بسعة 512KB، CANFD بسرعة 5 ميجابت/ثانية
MATEKSYS
سعر عادي
$39.00 USD
سعر عادي
سعر البيع
$39.00 USD
سعر الوحدة
per
Taxes included.
الشحن محسوب عند السداد.
تعذر تحميل توفر الالتقاط
نظرة عامة
هذه وحدة AP Periph CAN، Matek AP Periph CAN Node CAN-G474، هي وحدة محول AP_Periph مصممة لإضافة الأجهزة الطرفية إلى حافلة DroneCAN باستخدام جهاز إرسال واستقبال CAN بسرعة 5Mbit/s وميكروكنترولر STM32G474. إنها تمكن من دمج المستشعرات المدعومة من ArduPilot والأجهزة الطرفية المعتمدة على GPIO (مثل مخرجات PWM ووحدات إشعار LED) من خلال DroneCAN.
الميزات الرئيسية
- محول عقدة يعتمد على برنامج ArduPilot AP_Periph
- وحدة المعالجة STM32G474CE مع 512KB فلاش
- أجهزة تدعم CANFD مع دعم CAN/CANFD من 1Mbit ~ 5Mbit
- 2x حافلة CAN
- 4x UARTs لـ GNSS، جهاز قياس المدى، القرب، EFI، إدخال RC (المستقبل)؛ تم تفعيل MSP على TX3 بشكل افتراضي لـ GNSS، البوصلة، البارومتر عبر MSP
- 2x حافلة I2C للأجهزة الطرفية I2C (مستشعر سرعة الهواء، بارومتر، بوصلة)
- 1x SPI لـ RM3100 (أطراف SPI على الجانب السفلي مع طباعة حريرية "CS، MOSI، MISO، SCK")
- 11x مخرجات PWM للخوادم و ESC؛ جميع PWM تدعم DMA/DShot (PWM1-10 على DuPont 2.54 مم ثقوب؛ وسادة PWM11 على الجانب السفلي مع طباعة حريرية "11"
- دعم تحديث البرنامج الثابت عبر أداة DroneCAN GUI / مخطط المهمة (علامة DroneCAN) وعبر وضع DFU لبرنامج STM32CubeProgrammer (UART1)
المواصفات
| وحدة التحكم الدقيقة | STM32G474CE |
| فلاش | 512KB |
| معدل بيانات جهاز الإرسال والاستقبال CAN | حتى 5Mbit/s |
| دعم CAN / CANFD | 1Mbit ~ 5Mbit CAN/CANFD |
| حافلة CAN | 2x |
| UART | 4x (تم تفعيل MSP على TX3 بشكل افتراضي) |
| I2C | 2x |
| SPI | 1x (لـ RM3100) |
| مخرجات PWM | 11x (PWM1-10 على DuPont 2.54 مم ثقوب؛ وسادة PWM11 على الجانب السفلي) |
| تصحيح الأخطاء | تصحيح الأخطاء ST، SWC & SWD (على الجانب السفلي) |
| تحديث البرنامج الثابت (DFU) | UART1 (TX1، RX1) |
| مؤشرات LED | وميض أزرق سريع: بدء التشغيل؛ وميض أزرق بطيء: التواصل مع وحدة التحكم في الطيران؛ أحمر: مؤشر 3.3 فولت |
| نطاق جهد الإدخال | 4.5~5.5 فولت @5V وسادة/دبوس& |
| استهلاك الطاقة | 62 مللي أمبير |
| درجات حرارة التشغيل | -30~85 °م |
| الموصلات | 5x JST-GH-4P (SM04B-GHS-TB) لـ CAN1، CAN2، I2C1، UART1، UART4؛ 1x JST-GH-6P (SM06B-GHS-TB) لـ UART3+I2C2 |
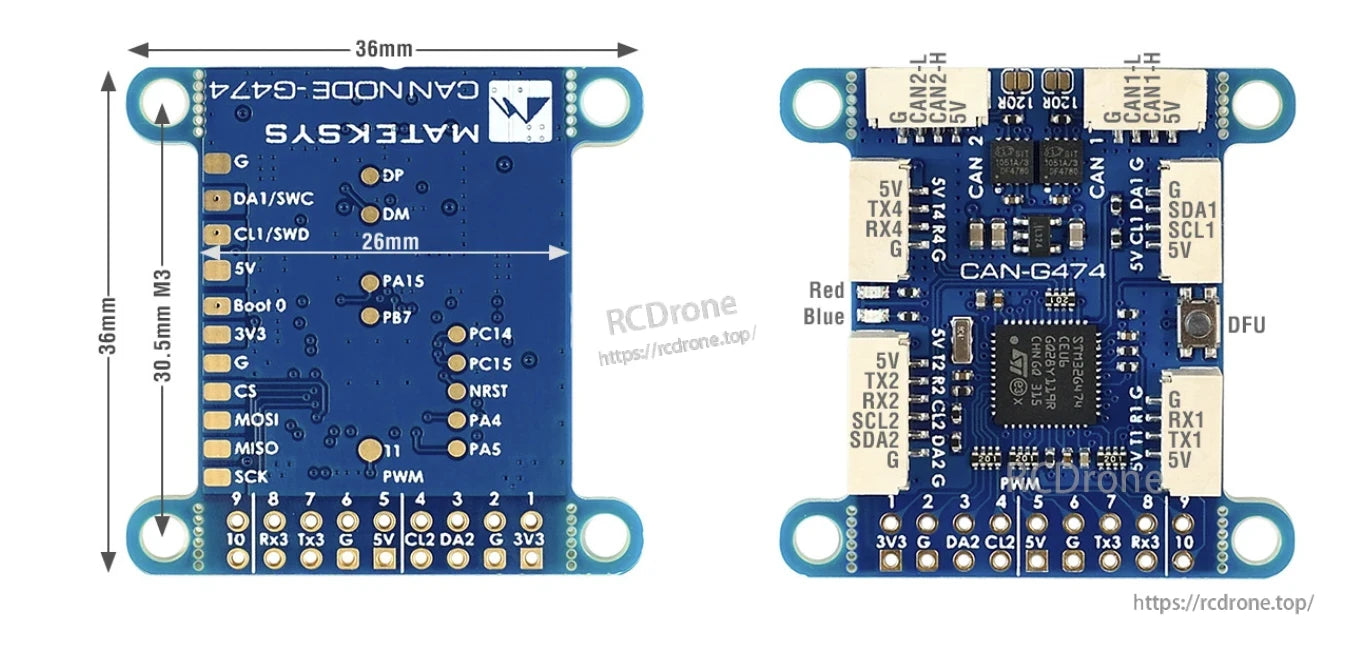
| ثقوب تمرير | 18x دو بونت 2.54 مم ثقوب |
| حجم اللوحة | 36 مم * 36 مم * 6 مم |
| الوزن | 5.2 جرام |
| التثبيت | 30.5 مم 4x قطر.3mm |
ما هو مدرج
- 1x لوحة CAN-G474
- 2x سلك سيليكون JST-GH-4P إلى JST-GH-4P بطول 20 سم
- 1x سلك سيليكون JST-GH-6P إلى JST-GH-6P بطول 20 سم
خدمة العملاء: https://rcdrone.top/ أو [email protected]
التطبيقات
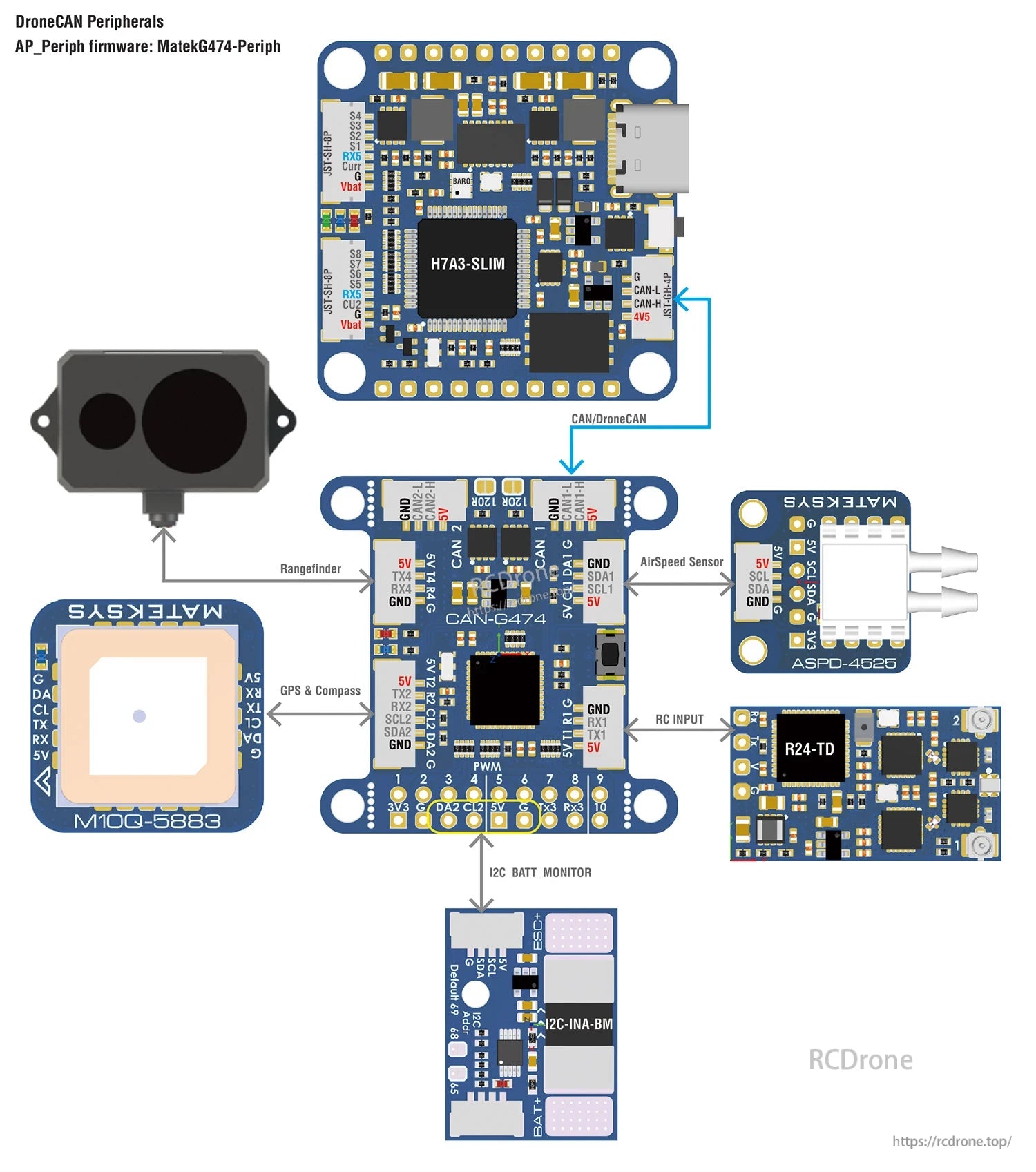
- تحويل الأجهزة المدعومة من ArduPilot إلى أجهزة DroneCAN (GNSS، بوصلة، بارومتر، مستشعر سرعة الهواء، جهاز قياس المسافة، مستشعر القرب، حقن الوقود الإلكتروني)
- الأجهزة المعتمدة على GPIO على DroneCAN، بما في ذلك وحدات إشعار PWM و LED
- مثال على اتصالات الأجهزة الموضحة: جهاز قياس المسافة، GPS & بوصلة، مستشعر سرعة الهواء، إدخال RC، مراقب بطارية I2C
- خيار التكرار: توصيل إما حافلة CAN واحدة إلى وحدة التحكم في الطيران، أو توصيل كلاهما
الكتيبات
- تنزيلات البرنامج الثابت (ArduPilot AP_Periph): https://firmware.ardupilot.org/AP_Periph/
- ماتيكG474-الطرفيات (لأجهزة الاستشعار الطرفية)
- ماتيكG474-DShot (لإخراج DroneCAN-PWM)
- طرق التحديث
- أداة واجهة DroneCAN أو مخطط المهمة – علامة DroneCAN، تحميل “AP_Periph.bin”
- وضع DFU لبرنامج STM32CubeProgrammer: قم بتوصيل وحدة USB-TTL بـ UART1، قم بتوصيل USB مع الضغط على زر DFU، تحميل “AP_Periph_with_bl.hex”
- ملف 3D: CAN-G474_STEP.zip
- دليل: استخدام محولات MatekL431 لـ PWM و DShot
تفاصيل
تقدم لوحة ماتيك CAN-G474 منفذ DroneCAN/CAN إلى جانب UART و I2C و وسادات PWM لتوصيل الأجهزة الطرفية الشائعة للطائرات بدون طيار.تتصل لوحة Matek CAN-G474 بحافلة CAN/DroneCAN وتوفر ما يصل إلى 10 مخرجات PWM للخدمات أو وحدات التحكم في السرعة (ESCs).