MATEK CAN-L4-BM - جهاز مراقبة الطاقة الرقمي Mateksys AP_PERIPH
MATEK CAN-L4-BM - جهاز مراقبة الطاقة الرقمي Mateksys AP_PERIPH
MATEKSYS
تعذر تحميل توفر الالتقاط
MATEK CAN-L4-BM - يمكن لـ Mateksys AP_PERIPH مواصفات مراقبة الطاقة الرقمية
الاستخدام: المركبات وألعاب التحكم عن بعد
العمر الموصى به: 12+ص,14+ص
الأصل: البر الرئيسي للصين
المواد: المواد المركبة
اسم العلامة التجارية: MATEKSYS
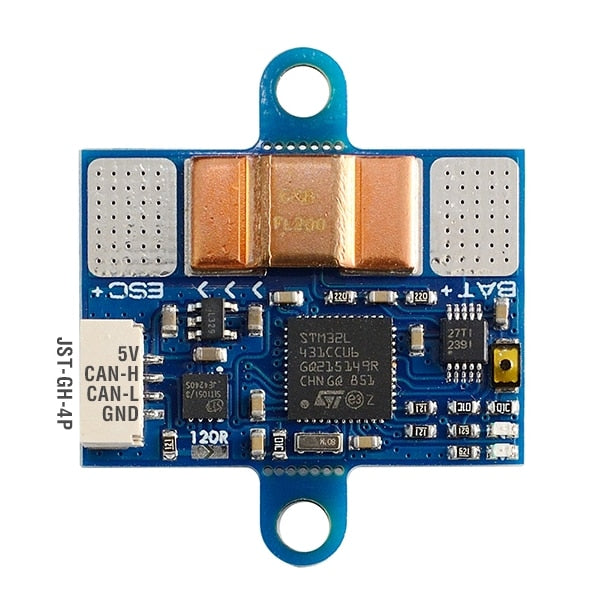
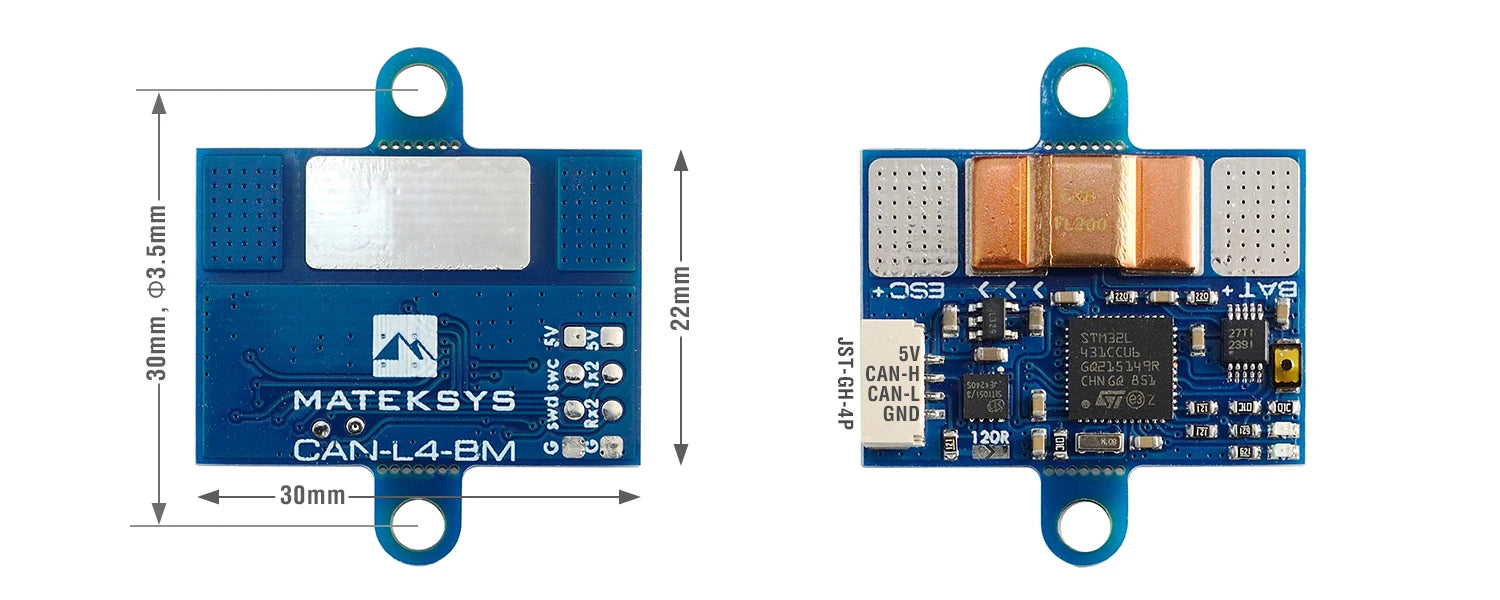
جهاز مراقبة الطاقة الرقمي AP_PERIPH CAN، CAN-L4-BM
التيار 0~204.8A، الجهد 0~85 فولت، بروتوكول CAN/DroneCAN
-
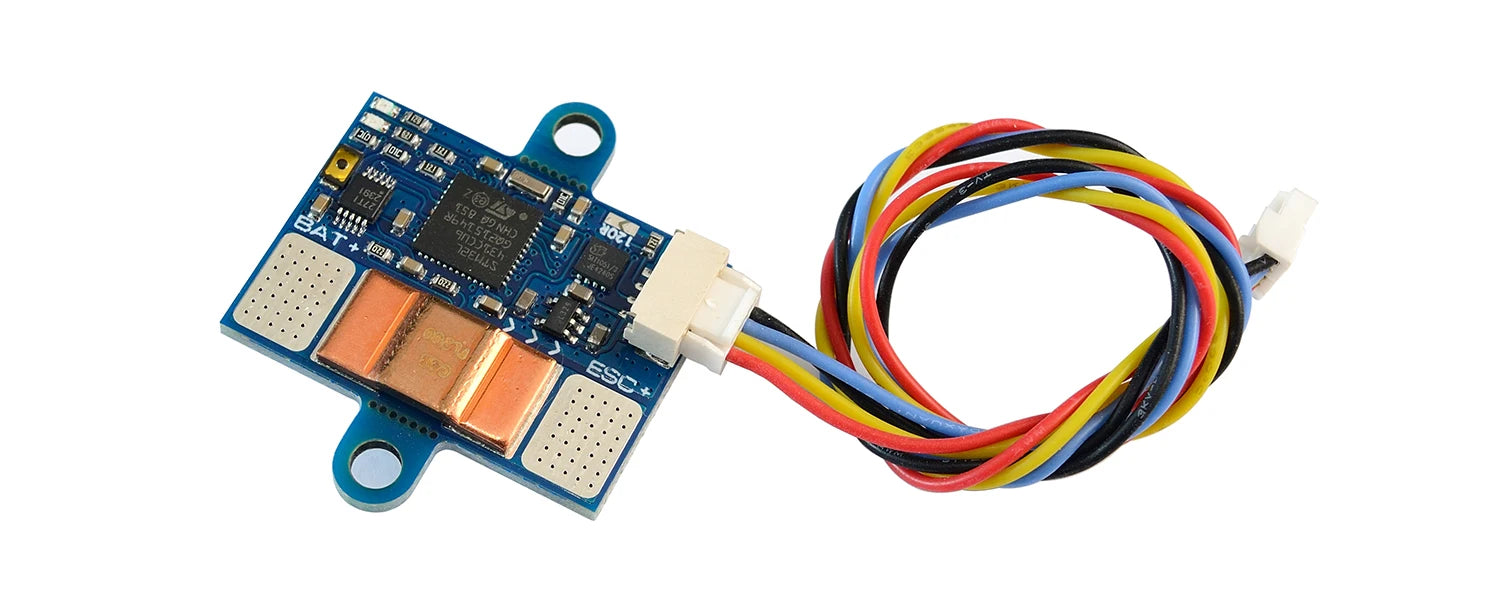
CAN-L4-BM عبارة عن جهاز مراقبة طاقة رقمي فائق الدقة يعتمد على البرامج الثابتة TI INA239 وArudPilot AP_Periph.
-
تبلغ مقاومة هذا المسار الموصل 200 μΩ بشكل نموذجي، مما يوفر فقدانًا منخفضًا للطاقة في التطبيق.
-
باستخدام هذا الجهاز، لا يلزم إجراء معايرة، يمكن لوحدة التحكم في الطيران التي تدعم بروتوكول DroneCAN الحصول بسهولة على قراءات دقيقة لجهد التيار والناقل عبر ناقل CAN.
المواصفات
-
MCU: STM32L431xC، فلاش 256 كيلو بايت
-
INA239 85-V، 16 بت، شاشة مراقبة الطاقة عالية الدقة IC مع واجهة SPI
-
إدخال استشعار جهد البطارية: 0~85 فولت
-
نطاق التحسس الحالي: 0~204.8A
-
تحميل التيار على مقاومة الاستشعار الحالية: 150 أمبير (مستمر)، 204.8 أمبير (انفجار)
-
دقة الجهد: ± 0.1%
-
الدقة الحالية: ± 2%
-
الواجهة
-
يمكن، بروتوكول DroneCAN
-
UART2، احتياطي، DFU
-
تصحيح ST، SWCLK وSWDIO
-
-
LED
-
أزرق، وامض سريع، التشغيل
-
أزرق، وميض بطيء، يعمل
-
أحمر، مؤشر 3.3 فولت
-
مصدر الطاقة للوحة CAN-L4-BM: 4.5~5.5V @5V وسادة/دبوس
-
استهلاك الطاقة: 10 مللي أمبير
-
درجات حرارة التشغيل: -40~85 درجة مئوية
-
المادي
-
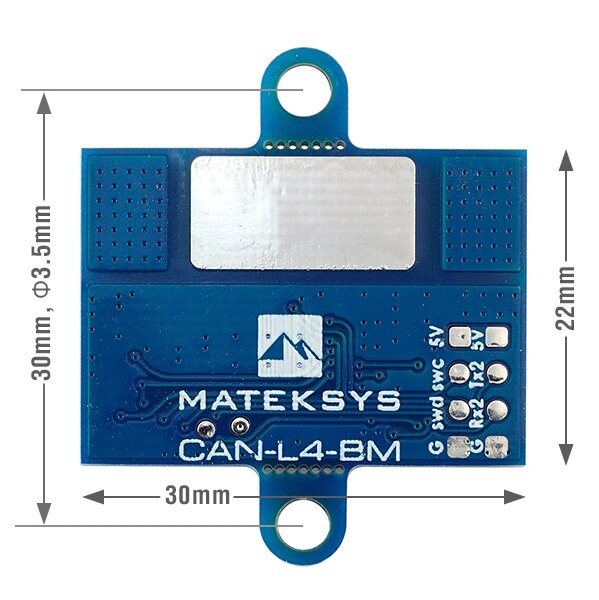
حجم اللوحة: 30 مم * 22 مم * 3 مم. 4 جرام
-
ملف ثلاثي الأبعاد: CAN-L4-BM_STEP.zip
-
-
البرامج الثابتة
-
ArduPilot AP_Periph MatekL431-BattMon
-
التحديث عبر أداة DroneCAN GUI
-
-
المعلمات
-
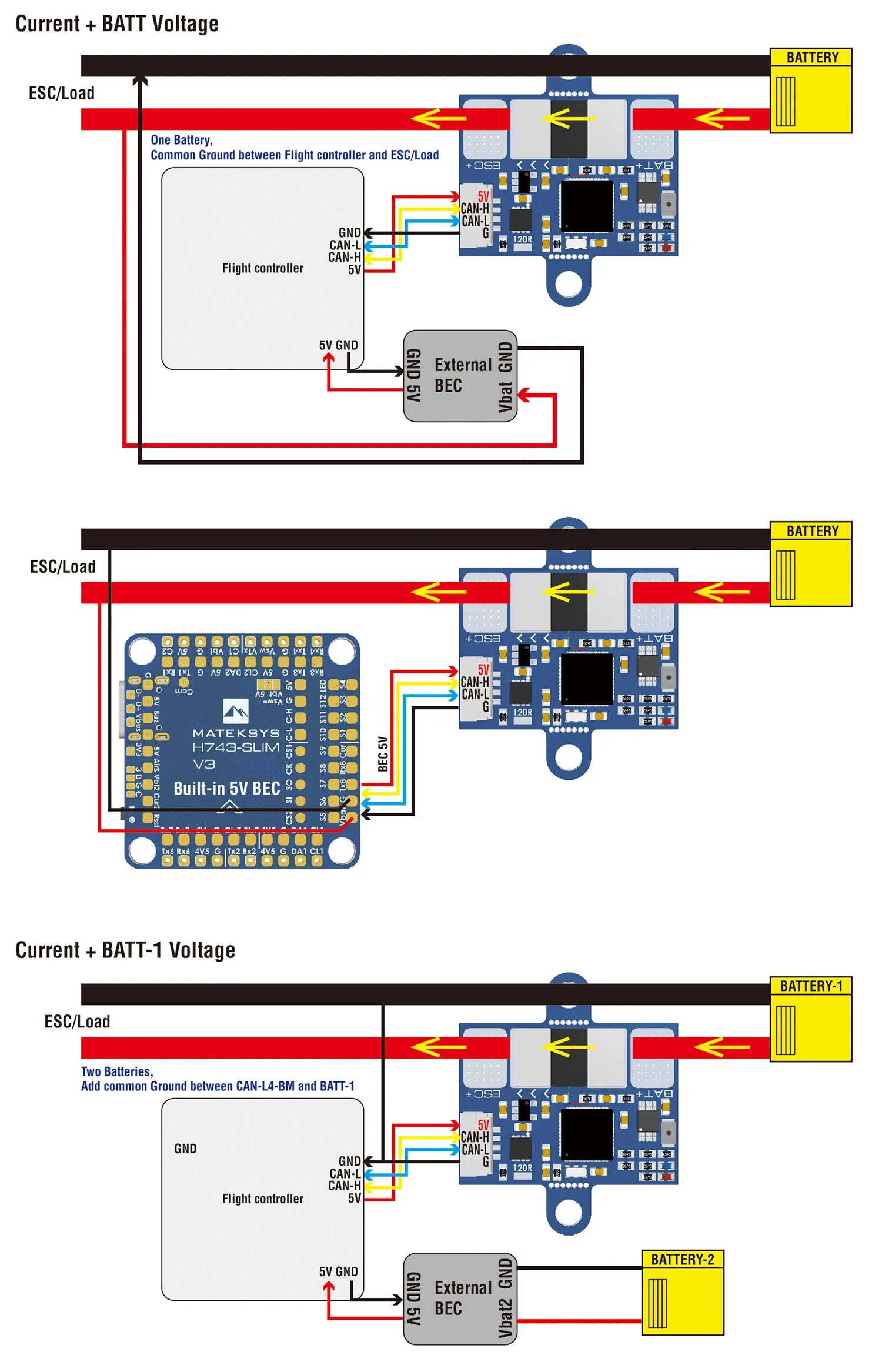
CAN_P1_DRIVER = 1 إذا كان متصلاً بمنفذ CAN bus1 أو CAN_P2_DRIVER = 1 إذا كان متصلاً بمنفذ CAN bus2
-
BATTx_MONITOR = 8 (DroneCAN-BatteryInfo)
-
التعبئة
-
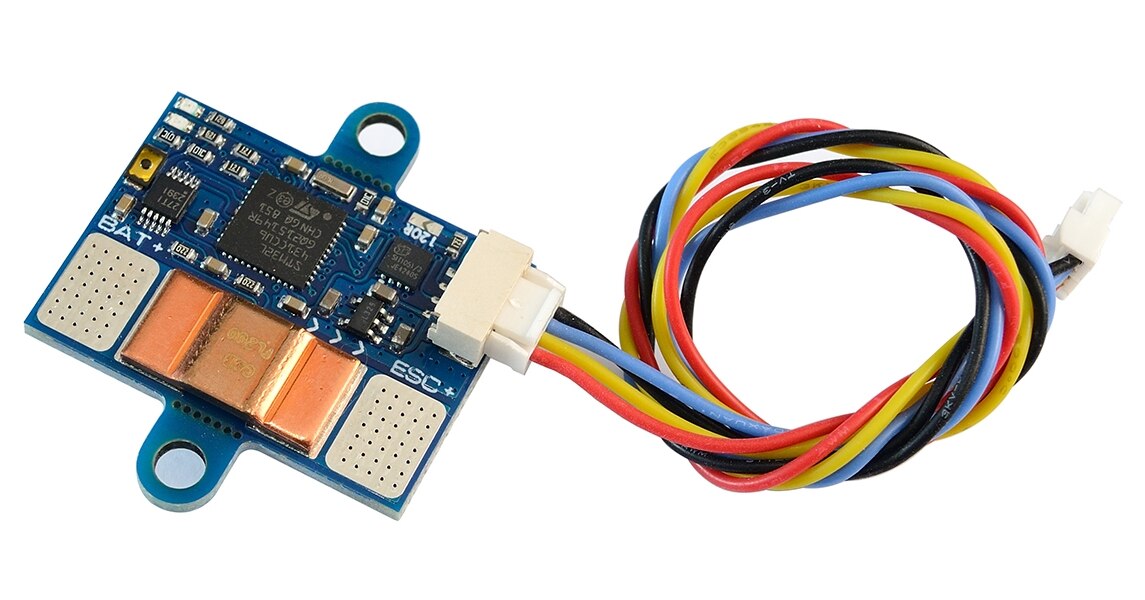
1x لوحة CAN-L4-BM
-
1x سلك السيليكون JST-GH-4P إلى JST-GH-4P مقاس 20 سم
نصائح
-
اللوحة الكبيرة الموجودة في الجانب السفلي هي لوحة ميتة. لا يوجد أي شبكة دوائر عليه.
-
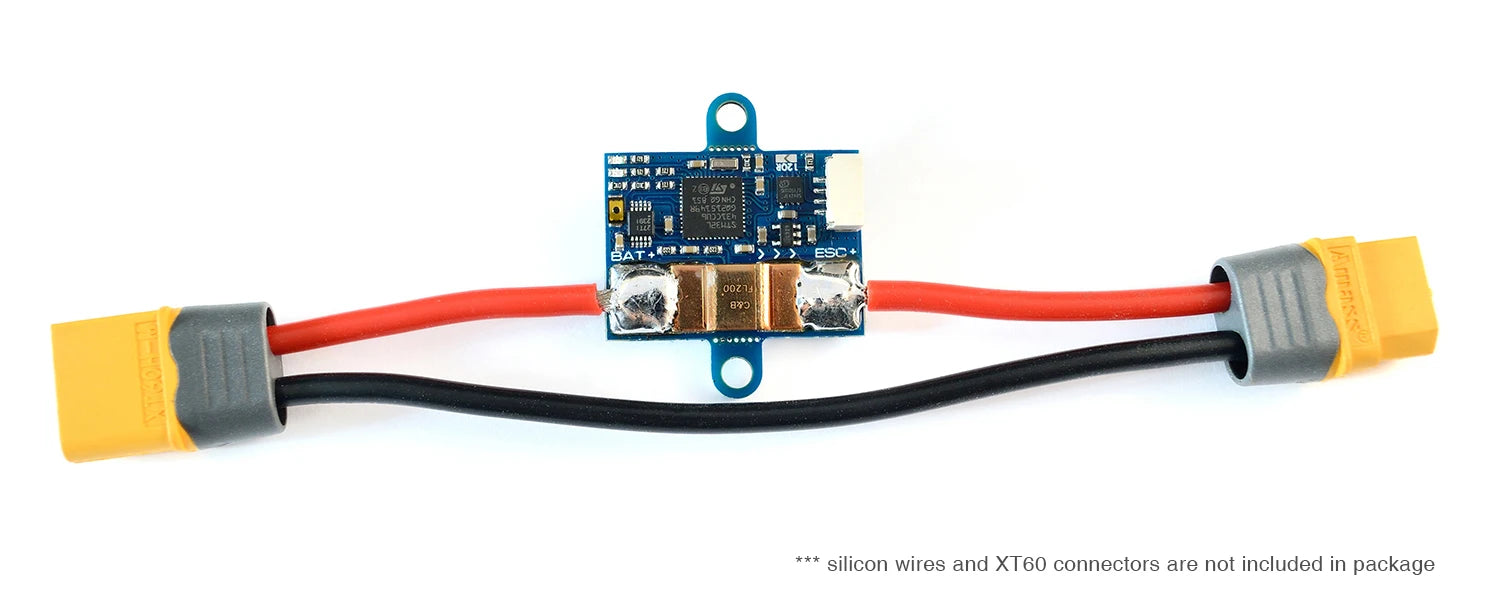
قم بلحام الأسلاك الموجبة في أقرب مكان ممكن من كلا جانبي مقاومة الاستشعار الحالية.
-
يمكن قطع أذنين للتركيب إذا لم تكن في حاجة إليها.
-
إذا كانت أسلاك CAN طويلة جدًا، فقم بتوصيل وصلة العبور "120R".
Related Collections