يمكن لـ MATEK Mateksys AP_PERIPH العقدة L431
يمكن لـ MATEK Mateksys AP_PERIPH العقدة L431
MATEKSYS
تعذر تحميل توفر الالتقاط
يمكن لـ MATEK Mateksys AP_PERIPH عقدة مواصفات L431
الاستخدام: المركبات وألعاب التحكم عن بعد
العمر الموصى به: 12+y,14+y,3-6y,6-12y,0-3y
الأصل: البر الرئيسي للصين
المواد: المواد المركبة
اسم العلامة التجارية: MATEKSYS
يمكن لـ AP_PERIPH العقدة L431
AP_Periph، عقدة CAN، DroneCAN، L431


-
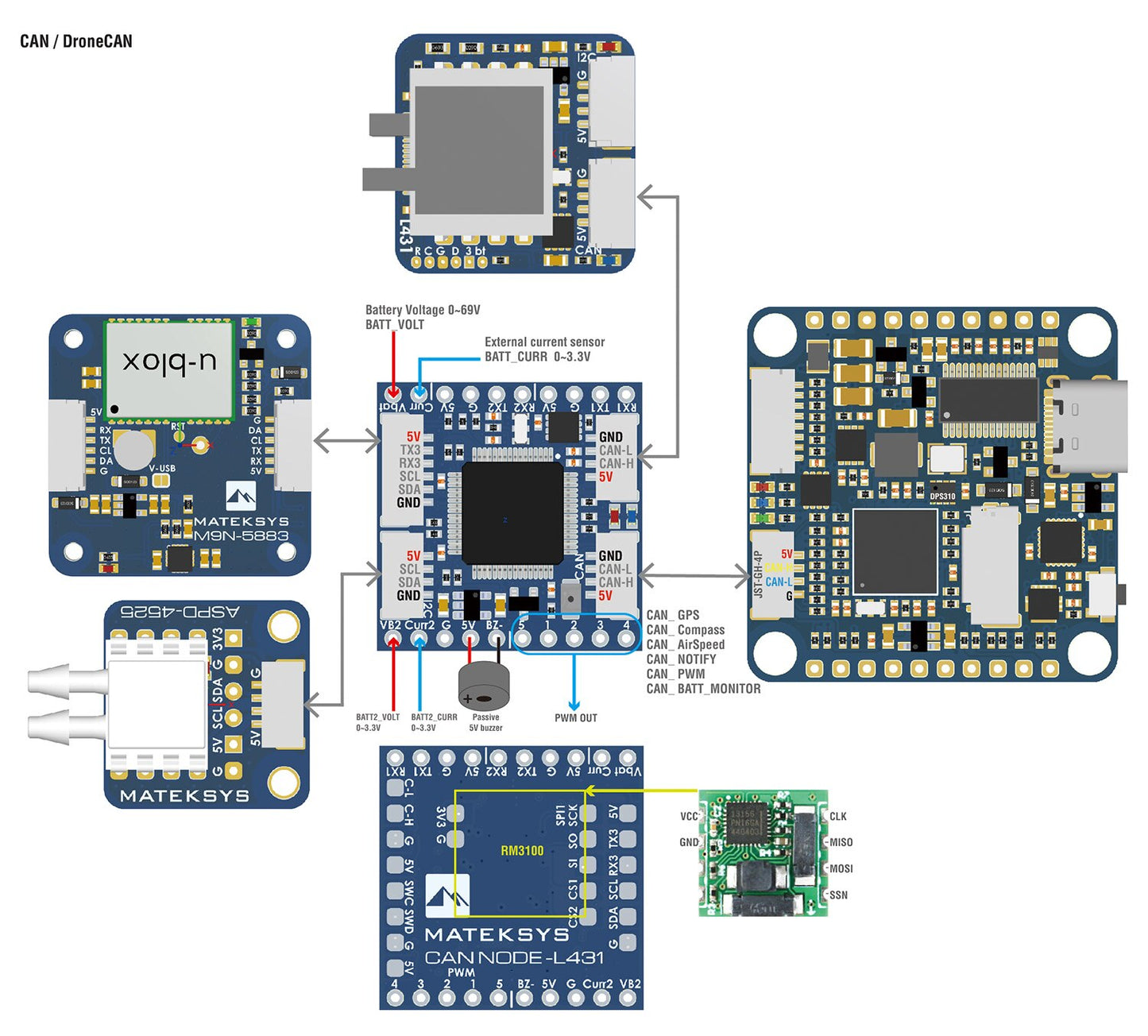
CAN-L431 عبارة عن عقدة محول تعتمد على البرامج الثابتة ArudPilot AP_Periph.
-
باستخدام هذه اللوحة، يمكنك بسهولة الاستفادة من مكتبة برنامج تشغيل ArduPilot لتحويل الأجهزة الطرفية المدعومة من ArduPilot GNSS والبوصلة والبارومتر ومستشعر السرعة الجوية والأجهزة الطرفية المعتمدة على GPIO (PWM وBuzzer/LED) إلى الأجهزة الطرفية لحافلة DroneCAN.
المواصفات
-
MCU: STM32L431xC، فلاش 256 كيلو بايت
-
معدلات بيانات جهاز الإرسال والاستقبال CAN تصل إلى 5 ميجابت/ثانية في المرحلة السريعة CAN FD
-
1x CAN، بروتوكول DroneCAN (2x موصلات GH-4P بالتوازي)
-
3x UARTs
-
UART1، احتياطي
-
UART2، MSP الافتراضي، DFU
-
UART3، نظام تحديد المواقع العالمي (GPS) الافتراضي
-
-
1x I2C
-
لمستشعر السرعة الجوية الطرفية
-
للبارومتر المحيطي
-
للبوصلة الطرفية QMC5883L
-
-
1x سبي
-
للأجهزة الطرفية RM3100
-
-
4x أدك
-
BATT_VOLT، رقم التعريف الشخصي 5
-
BATT_CURR، رقم التعريف الشخصي 6
-
BATT2_VOLT، رقم التعريف الشخصي 15
-
BATT2_CURR، رقم التعريف الشخصي 16
-
-
5x مخرجات PWM
-
1x GPIO مع TIM16 للجرس
-
تصحيح ST، SWCLK وSWDIO
-
الصمام
-
أزرق، وامض سريع، التشغيل
-
أزرق، وميض بطيء، يعمل
-
أحمر، مؤشر 3.3 فولت
-
نطاق جهد الإدخال: 4.5~5.5V @5V لوحة/دبوس
-
استهلاك الطاقة: 40 مللي أمبير
-
درجات حرارة التشغيل
-
المادي
-
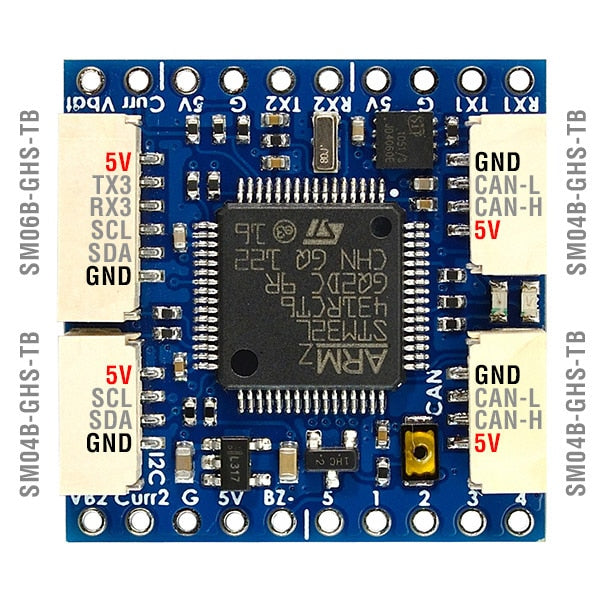
2x JST-GH-4P(SM04B-GHS-TB) لـ CAN
-
1x JST-GH-4P(SM04B-GHS-TB) لـ I2C
-
1x JST-GH-6P(SM06B-GHS-TB) لـ UART3+I2C
-
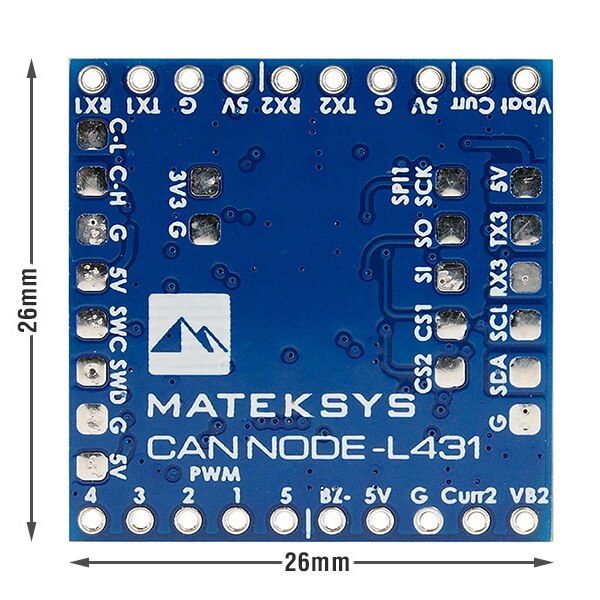
حجم اللوحة: 26 مم * 26 مم * 6 مم. 3.7 جرام
-
ملف ثلاثي الأبعاد: CAN-L431_STEP.الرمز البريدي
-
-
البرامج الثابتة
-
ArduPilot AP_Periph MatekL431-Periph، أو MatekL431-Airspeed
-
التحديث عبر أداة DroneCAN GUI
-
التعبئة
-
1x لوحة CAN-L431
-
1x سلك السيليكون JST-GH-4P إلى JST-GH-4P مقاس 20 سم
-
1x سلك السيليكون JST-GH-6P إلى JST-GH-6P مقاس 20 سم
نصائح
-
تدعم البرامج الثابتة MatekL431-Periph بوصلة I2C QMC5883L بشكل افتراضي
-
إذا قمت بتوصيل بوصلة I2C أخرى بهذه اللوحة، فستحتاج إلى تحديثها باستخدام هذا البرنامج الثابت عبر DroneCAN GUI أو وضع SLCAN في Mission Planner.
-