وحدة نظام تحديد المواقع MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
وحدة نظام تحديد المواقع MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEKSYS
تعذر تحميل توفر الالتقاط
MATEK M10-L4-3100 - مواصفات Mateksys AP_PERIPH GNSS
الاستخدام: المركبات وألعاب التحكم عن بعد
العمر الموصى به: 12+y,14+y,6-12y
الأصل: البر الرئيسي للصين
المواد: المواد المركبة
اسم العلامة التجارية: MATEKSYS
AP_PERIPH GNSS M10-L4-3100
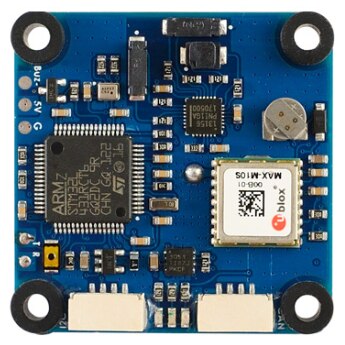
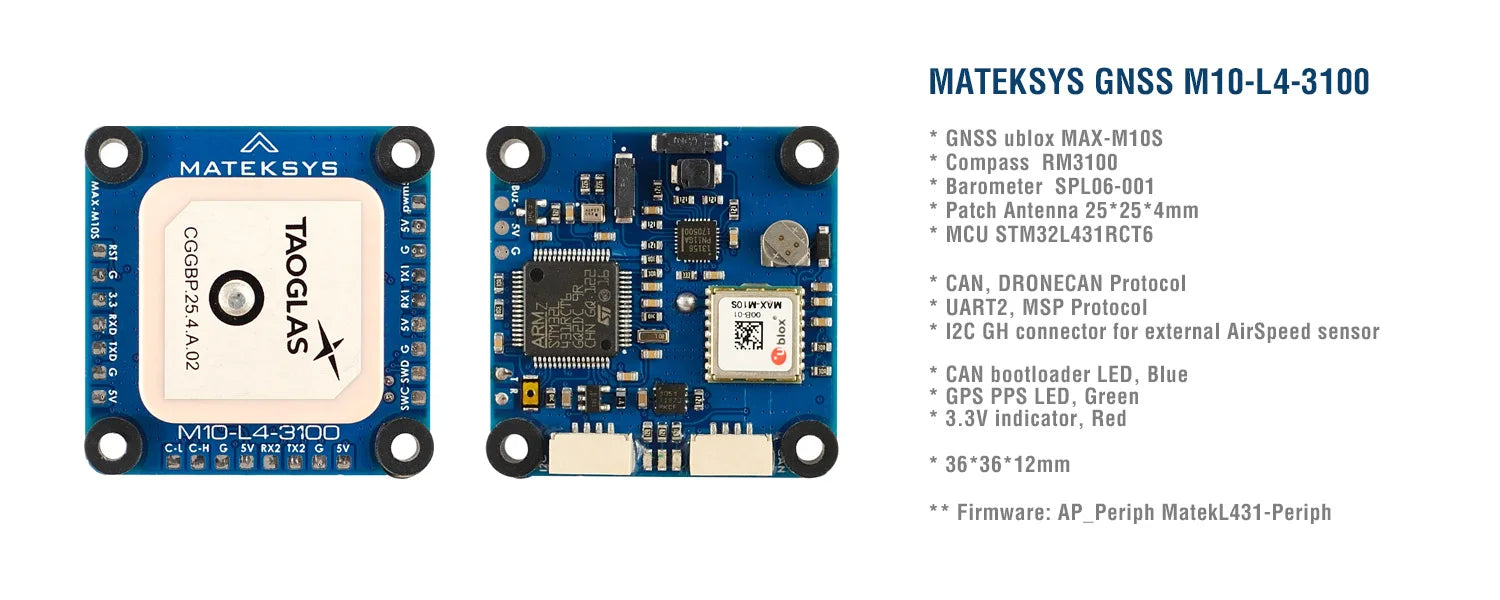
عقدة AP_Periph L431 CAN، MAX-M10S، RM3100، SPL06-001، بروتوكول DroneCAN وUART_MSP
-
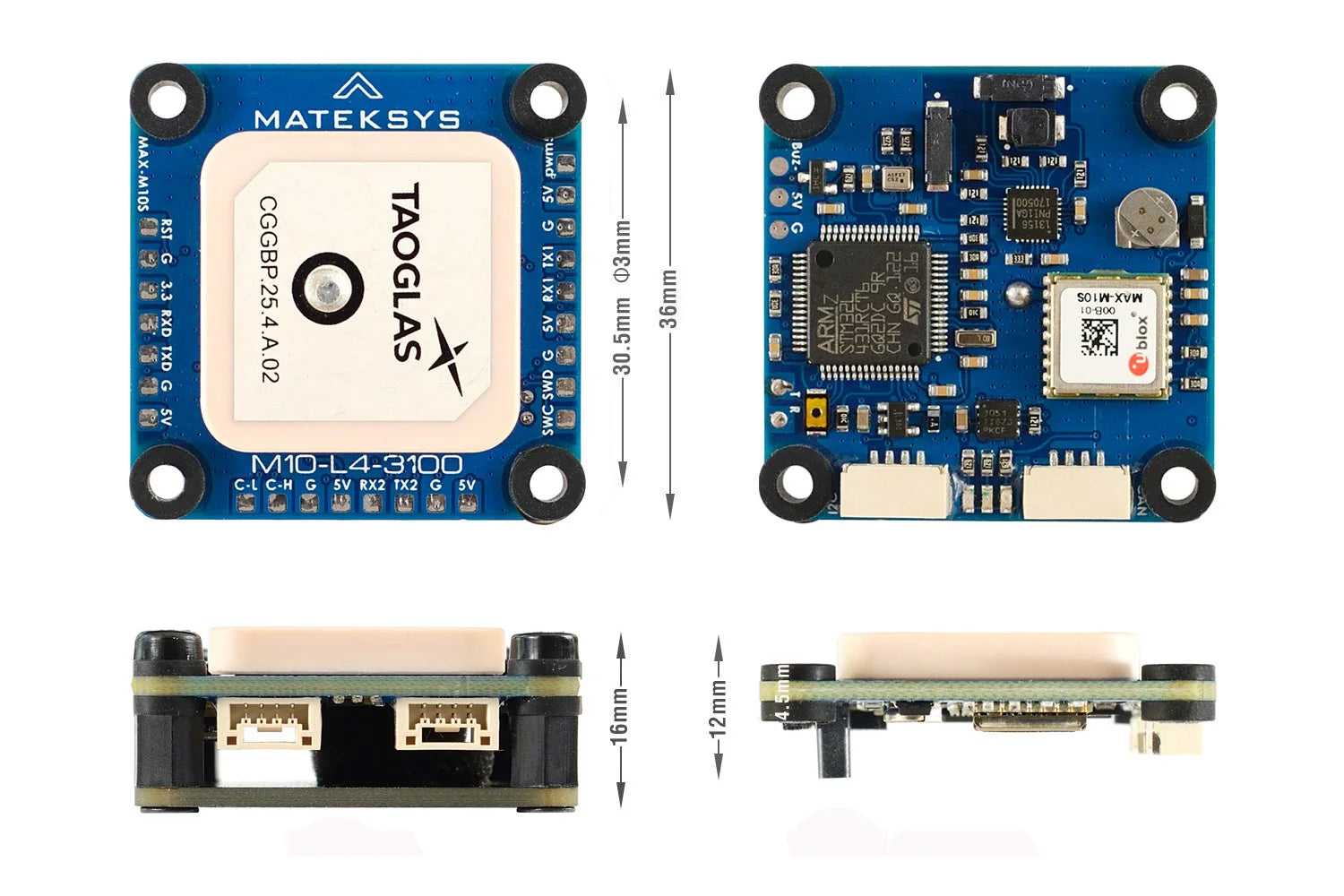
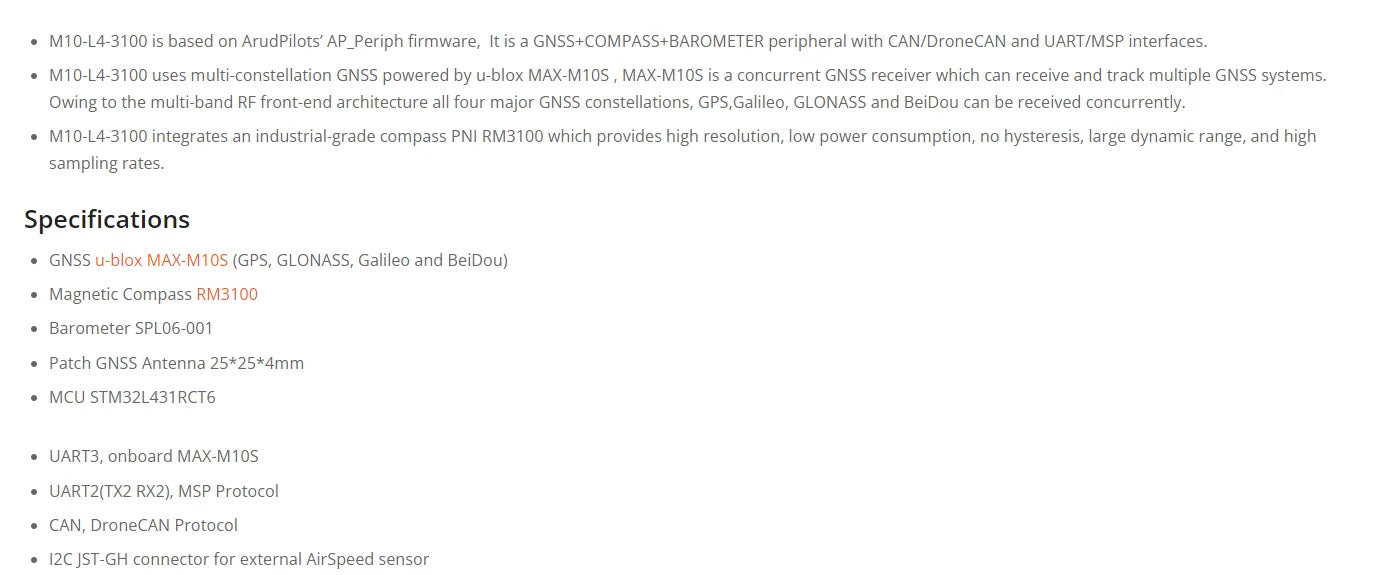
يعتمد M10-L4-3100 على البرامج الثابتة AP_Periph من ArudPilots، وهو جهاز طرفي GNSS+COMPASS+BAROMETER مزود بواجهات CAN/DroneCAN وUART/MSP.
-
يستخدم M10-L4-3100 كوكبة GNSS متعددة مدعومة من u-blox MAX-M10S، MAX-M10S هو جهاز استقبال GNSS متزامن يمكنه استقبال وتتبع أنظمة GNSS متعددة. نظرًا للبنية الأمامية للتردد الراديوي متعددة النطاقات، يمكن استقبال جميع مجموعات GNSS الأربعة الرئيسية، وهي GPS وGalileo وGLONASS وBeiDou بشكل متزامن.
-
تدمج M10-L4-3100 بوصلة من الدرجة الصناعية PNI RM3100 والتي توفر دقة عالية، واستهلاكًا منخفضًا للطاقة، وعدم وجود تباطؤ، ونطاق ديناميكي كبير، ومعدلات أخذ عينات عالية.

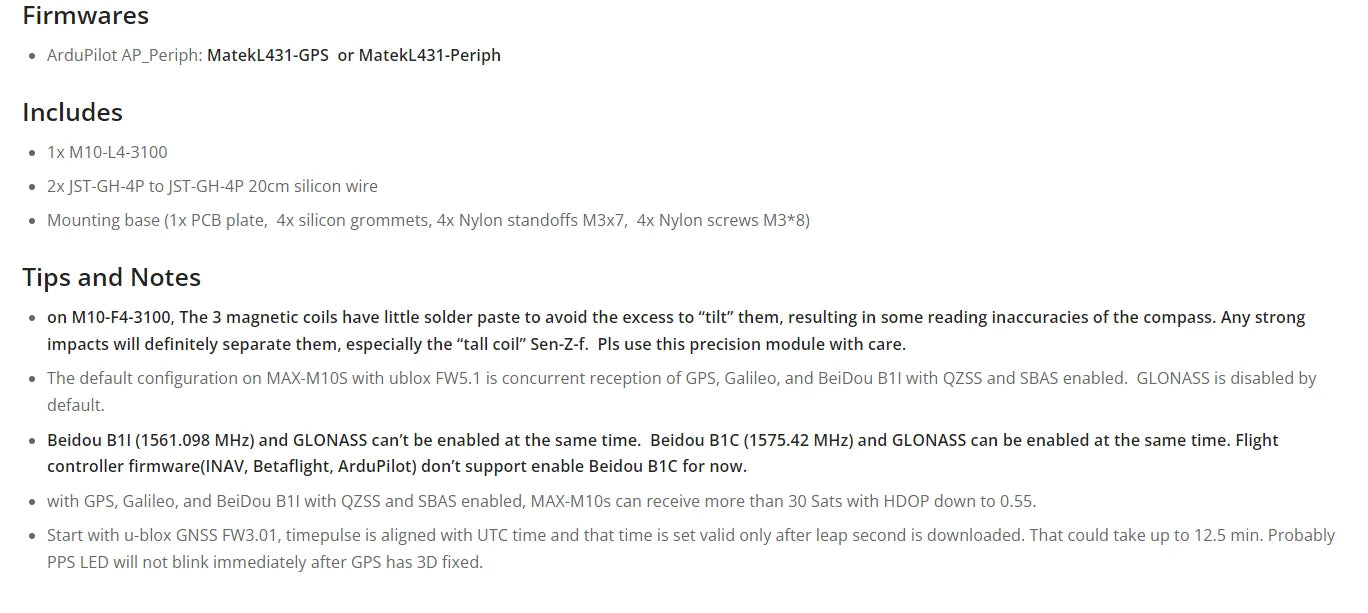
التكوين الافتراضي على MAX-M1OS مع ublox FWS . هو استقبال متزامن لنظامي GPS وGalileo وBeiDou BI مع تمكين QZSS وSBAS. يتم تعطيل GLONASS افتراضيًا Beidou B1I (1575.42 ميجاهرتز) ولا يمكن تمكينه في نفس الوقت.
اتصال CAN (بروتوكول UAVCAN)
-
M10-L4-3100 5V — FC 4.5V ~ 5.3V
-
M10-L4-3100 CAN-H — FC CAN عالي
-
M10-L4-3100 CAN-L — FC يمكن منخفض
-
M10-L4-3100 G — FC G/GND
معلمات FC UAVCAN(ArduPilot)
-
CAN_D1_PROTOCOL -> 1
-
CAN_P1_DRIVER -> 1
-
GPS_TYPE -> 9 (DroneCAN)
-
COMPASS_TYPEMASK -> 0 (تأكد من إلغاء تحديد DroneCAN)
—————————————————–
إذا قمت بتوصيل مستشعر السرعة الجوية I2C بمنفذ I2C الخاص بـ M10-L4-3100
-
ARSPD_TYPE -> 8 (الطائرة بدون طيار)
-
ARSPD_USE -> 1
ويجب عليك تعيين معلمات CAN Node لمستشعر السرعة الجوية المتصل بمنفذ I2C لـ M10-L4-3100
مخطط المهمة > الإعداد الأولي > الأجهزة الاختيارية > UAVCAN > وضع SLCan CAN1 > المعلمات
-
MS4525 ARSP_TYPE -> 1 (الافتراضي في hwdef)
-
MS5525 ARSP_TYPE -> 3 يدعم MS5525 بعنوان 0x77 فقط
-
SDP3X ARSP_TYPE -> 6
-
DLVR-L10D ARSP_TYPE -> 9
-
اكتب وأعد التشغيل
—————————————————–
إذا قمت بتوصيل 2812LED DIN بلوحة PWM5
-
NTF_LED_TYPES -> (تأكد من تحديد DroneCAN)
وضع SLCan CAN1 > المعلمات
-
OUT5_FUNCTION 120
-
NTF_LED_TYPES 455
-
يجب أن يكون AP_Periph fw "MatekL431-Periph"، تم تعطيل ميزة MSP في "MatekL431-GPS"
اتصال UART (بروتوكول MSP)
-
M10-L4-3100 5V — FC 4.0V ~ 5.3V
-
M10-L4-3100 TX2 — FC احتياطي UART_RX
-
M10-L4-3100 RX2 — FC UART_TX الاحتياطية (ليست ضرورية)
-
M10-L4-3100 G — FC G/GND
معلمات ArduPilot (منذ 4.1.x)
-
Serialx_PROTOCOL = 32 (MSP) حيث x هو المنفذ التسلسلي المستخدم للاتصال بالطيار الآلي.
-
Serialx_BAUD = 115 حيث x هو المنفذ التسلسلي المستخدم للاتصال بالطيار الآلي.
-
نوع نظام تحديد المواقع = 19 (MSP)
-
BARO_PROBE_EXT = 4096 (MSP بارو)
-
BARO_PRIMARY = 1 (إذا كنت تريد استخدام MSP baro كشريط أساسي، وإلا فاتركه كإعداد افتراضي)
-
COMPASS_TYPEMASK 0 (أو تأكد من عدم تحديد بت MSP)
INAV (منذ 2.6) معلمات FC
-
M10-L4-3100 متوافق مع أي وحدة تحكم طيران مدعومة بواسطة INAV عبر UART احتياطي.
-
في علامة تبويب المنافذ، قم بتمكين MSP على UART المقابل الذي يتصل به M10-L4-3100، لا تقم بتمكين "GPS" على UART هذا. حدد معدل الباود 115200.
-
ميزة نظام تحديد المواقع العالمي (GPS)
-
اضبط gps_provider = MSP
-
ضبط mag_hardware = MSP
-
ضبط baro_hardware = MSP
-
اضبط align_mag = CW90، إذا كانت البوصلة مثبتة بشكل مسطح بحيث يكون السهم متجهًا للأمام، وسهم وحدة التحكم في الطيران متجهًا للأمام أيضًا.
Related Collections