ماتيك ماتيكسيس وحدة التحكم في الطيران F405-HDTE
ماتيك ماتيكسيس وحدة التحكم في الطيران F405-HDTE
MATEKSYS
تعذر تحميل توفر الالتقاط
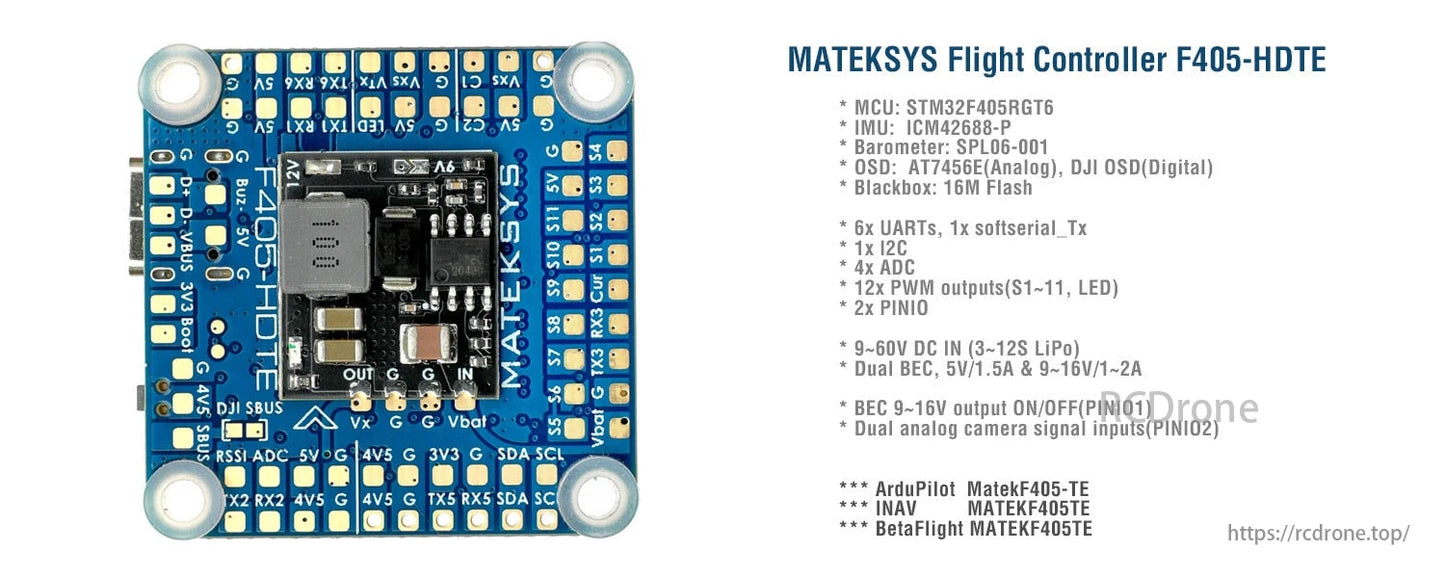
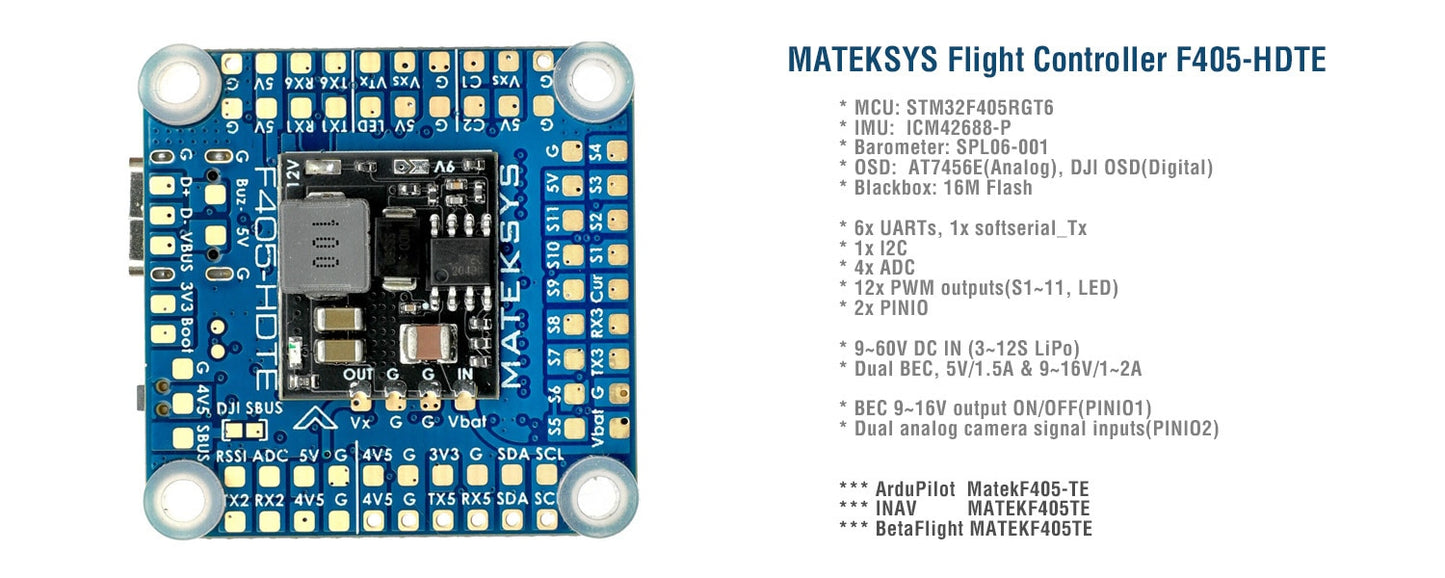
مواصفات وحدة التحكم في الطيران MATEK Mateksys F405-HDTE
الاستخدام: المركبات وألعاب التحكم عن بعد
العمر الموصى به: 12+y,14+y,6-12y
الأصل: البر الرئيسي للصين
المواد: المواد المركبة
اسم العلامة التجارية: MATEKSYS
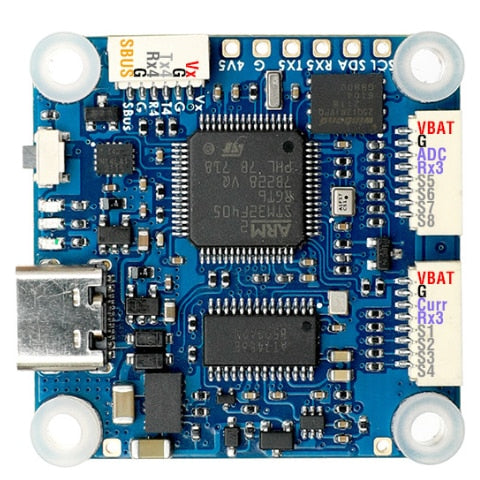
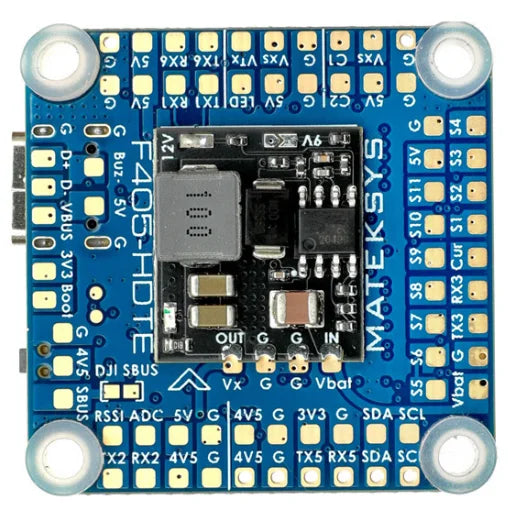
وحدة التحكم في الطيران F405-HDTE
STM32F405RGT6، ICM42688-P، SPL06، OSD، 6x UARTs، 1x I2C، 12x PWM، Dual BEC، 3~12S مدخل LiPo
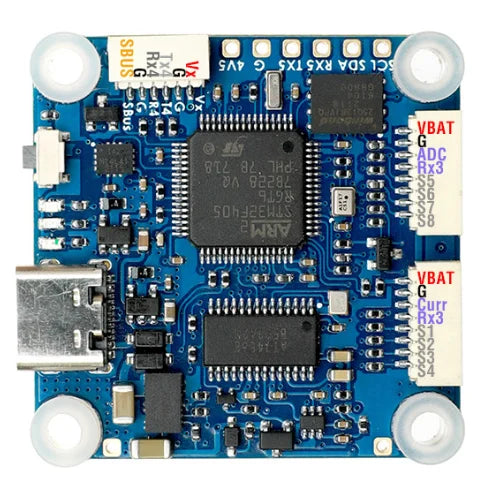
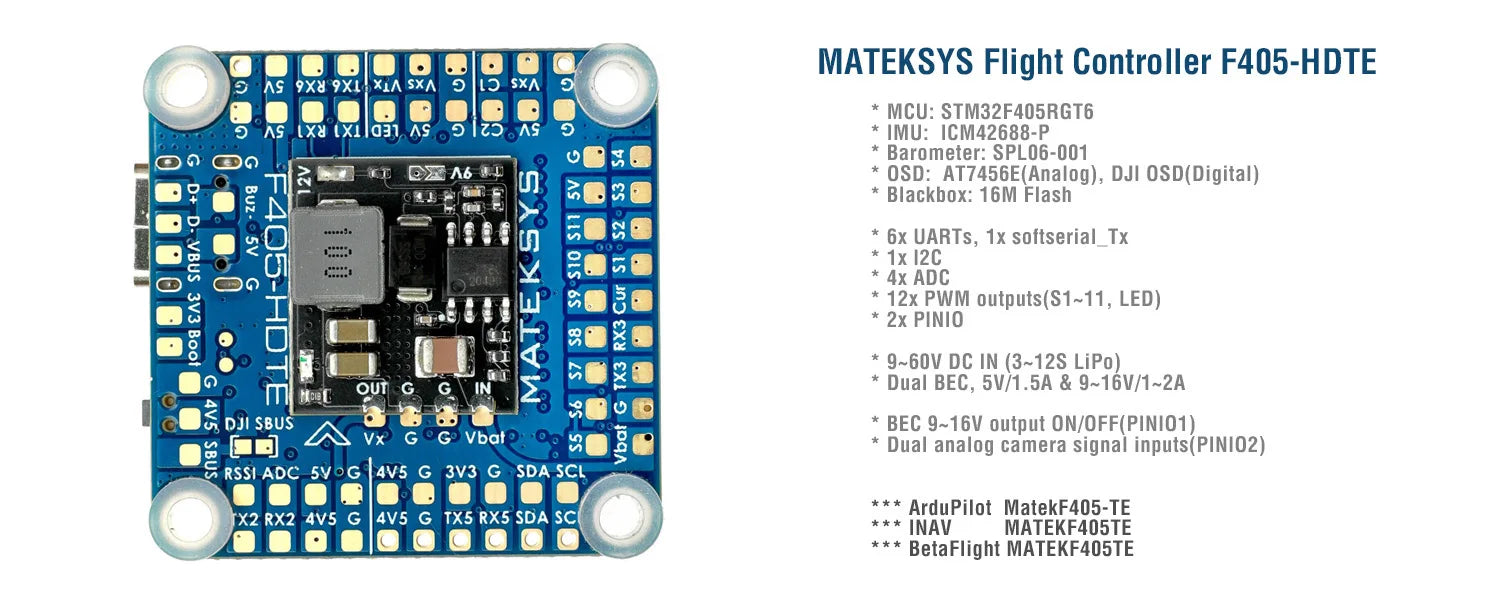
وحدة التحكم في الطيران MATEKSYS F4O5-HDTE كـ 9X8 9XL XiA Sxa MCU: STM3ZFAOSRGT6 X8 [XII031 23 IMU: ICM42688-P 5 البارومتر: SPLO6-001 @2]
الميزات
-
يحتوي STM32F405 على فلاش سعة 1 ميجابايت يمكنه تشغيل ArduPilot/INAV/BetaFlight
-
InvenSense الجيل الثالث من IMU ICM42688-P
-
9-60V(3~12S LiPo) جهد إدخال واسع وشعور بالجهد. و9 ~ 16 فولت BEC لـ DJI OSD أو VTX التناظري.
-
8 محركات + 3 محركات في الخلاط متعدد الدوار INAV/BF.
-
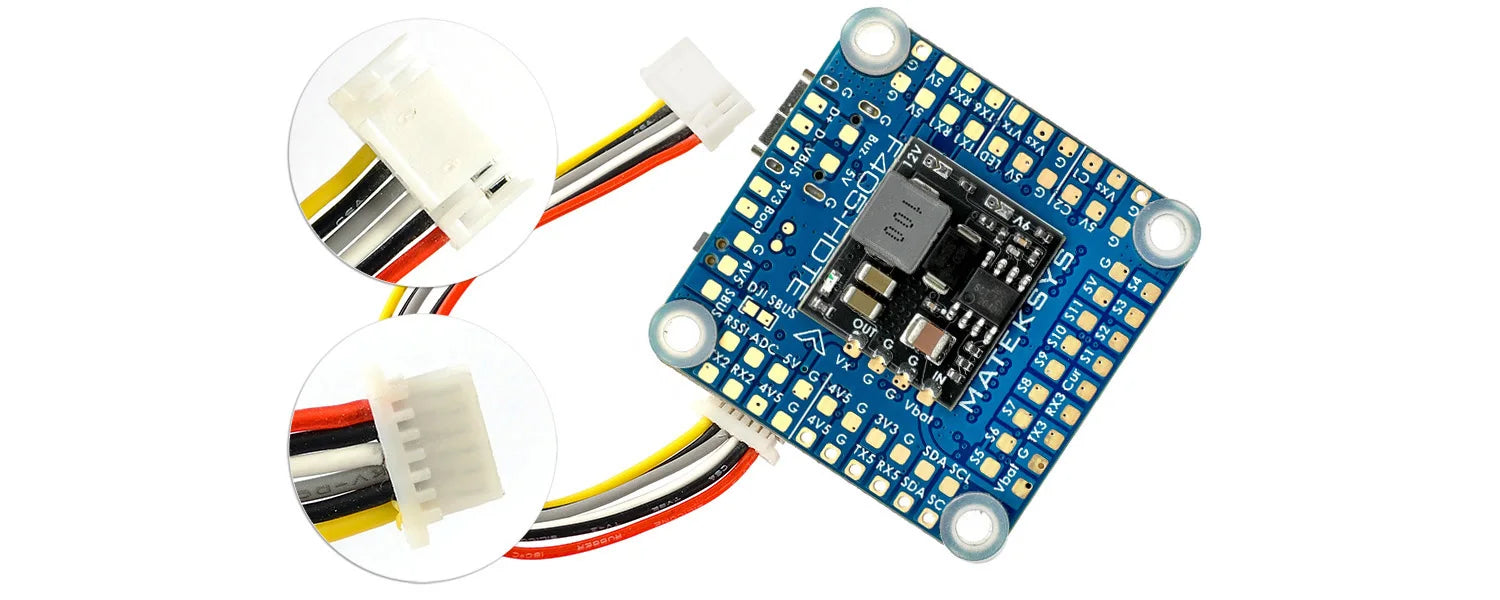
2x موصل SH1.0_8pin لـ PnP مع 2x 4in1 ESC
-
1x موصل SH1.0_6pin لـ PnP مع نظام HD (Caddx Vista & Air Unit)
-
منفذ توصيل USB للاتصال بمحول USB خارجي.
المواصفات
-
مكو: STM32F405RGT6
-
إيمو: ICM42688-P
-
OSD: AT7456E، DJI OSD
-
بارو: SPL06-001 (I2C)
-
الصندوق الأسود: ذاكرة فلاش سعة 16 ميجابايت
-
6x UARTs، خيار Softserial_Tx 1x
-
12x مخرجات PWM (8x Dshot)
-
1xI2C
-
4x ADC (VBAT، التيار، RSSI، السرعة الجوية)
-
2x بينيو
-
2x موصل SH1.0_8pin لـ 4in1 ESC
-
1x موصل SH1.0_6pin لنظام HD (Caddx Vista ووحدة الهواء)
-
3x مصابيح LED لحالة FC (أزرق، أخضر) ومؤشر 3.3 فولت (أحمر)
-
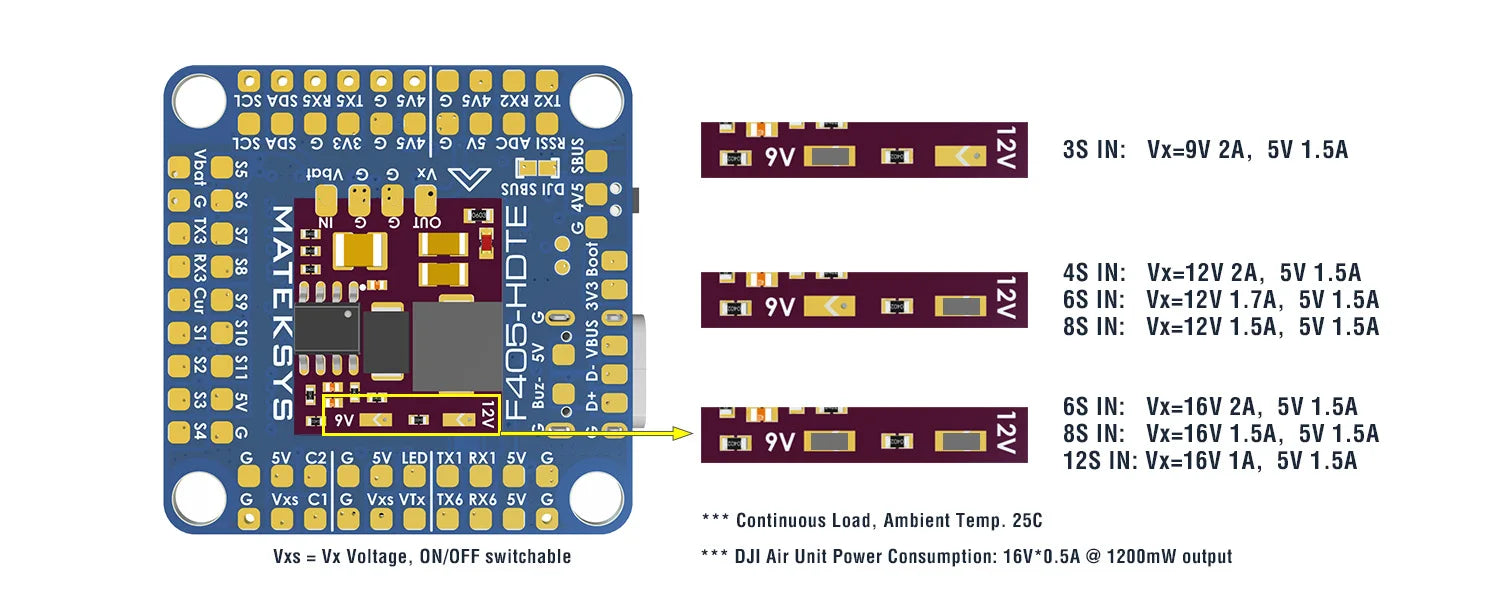
9~16V(Vxs) إخراج تشغيل/إيقاف قابل للتحويل
-
إمكانية تحويل إشارة الكاميرا التناظرية المزدوجة
الطاقة
-
الإدخال: 9~60 فولت (3~12 ثانية ليبو)
-
بيك: 5 فولت 1.5 أمبير
-
BEC: Vx، 9~16V/1~2A (3S IN/9V 2A، 4S IN/12V 2A، 6S IN/16V 2A، 8S IN/16V 1.5A، 12S IN/16V 1A)
-
مستشعر جهد البطارية: 1K:20K (مقياس INAV 2100، مقياس BF 210)
-
لا يوجد مستشعر تيار مدمج، يدعم مستشعر التيار الخارجي PDB/4in1
البرامج الثابتة
-
اردو بايلوت: MatekF405-TE
-
إيناف: MATEKF405TE
-
بيتا فلايت: MATEKF405TE
المادي
-
التركيب: 30.5 × 30.5 مم، Φ4 مم مع الحلقات Φ3 مم
-
الأبعاد: 36 × 36 × 9 ملم
-
الوزن: 7 جرام
بما في ذلك
-
1x FC F405-HDTE
-
6x حلقات سيليكون من M4 إلى M3
-
1x كابل SH1.0_8pin بطول 5 سم، 2x موصلات SH1.0_8pin
-
كابل 1x SH1.0_6pin إلى GH1.25_8pin بطول 8 سم لنظام HD (Caddx Vista ووحدة الهواء)
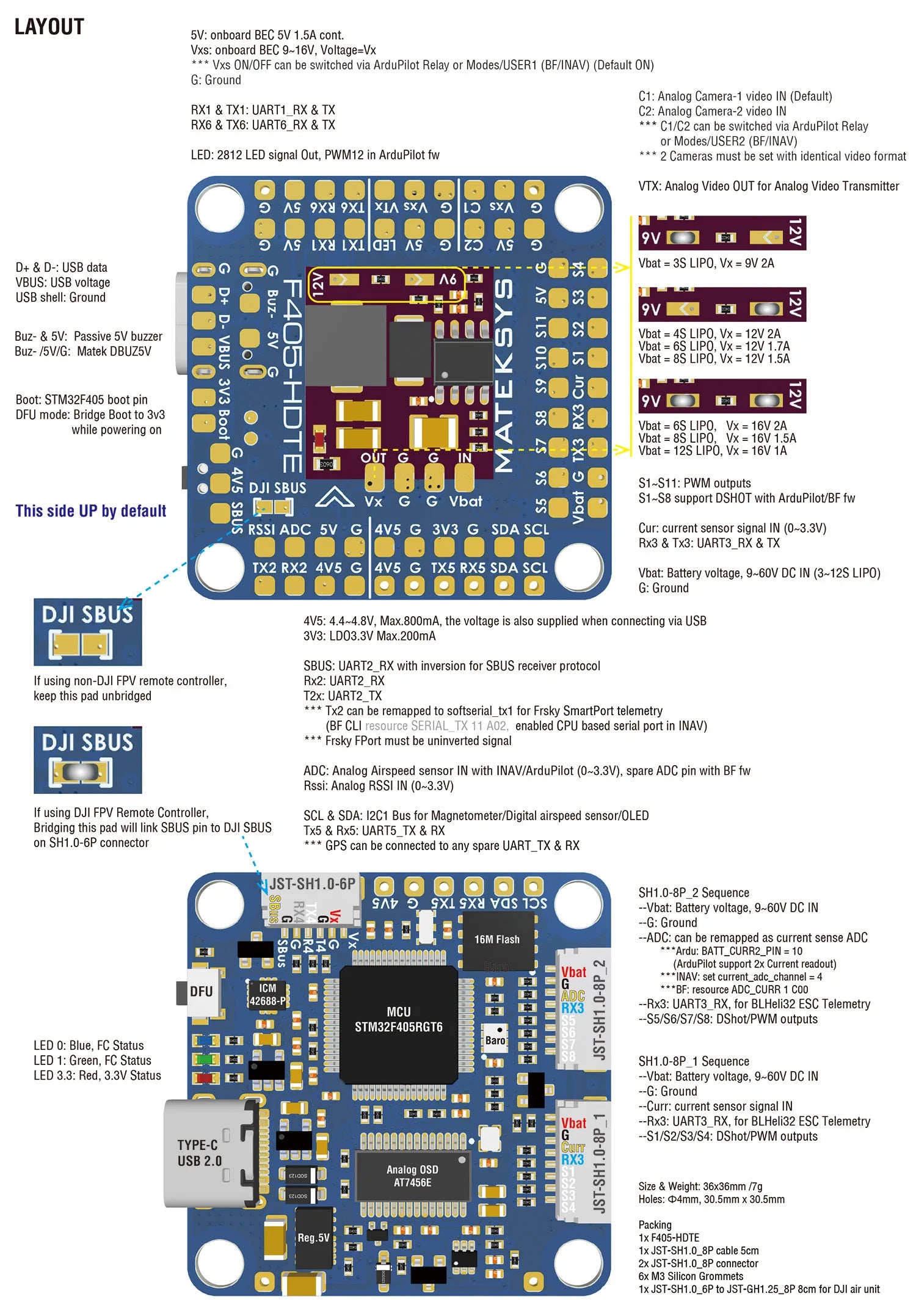
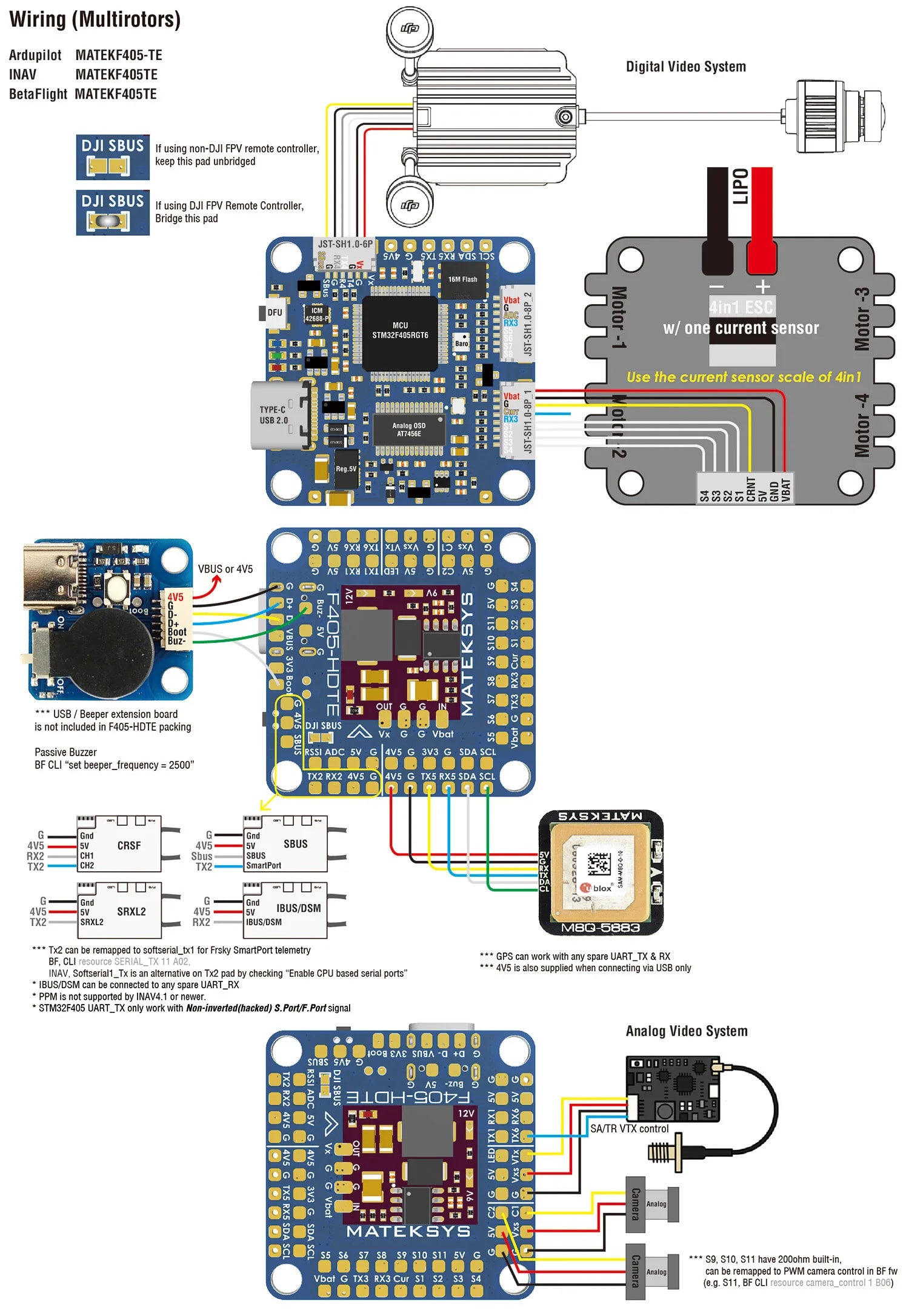
على متن BEC 5V، يمكن تشغيل/إيقاف الجهد الكهربي Vx Vxs عبر ArduPilot Relay أو الأوضاع/USER1 (BFIINAV) DJI SBUS 4V5: 4.44.8V، الحد الأقصى.80OmA، يتم توفير الجهد أيضًا عند الاتصال عبر USB 313: LDO3.3V Max.2OOmA .
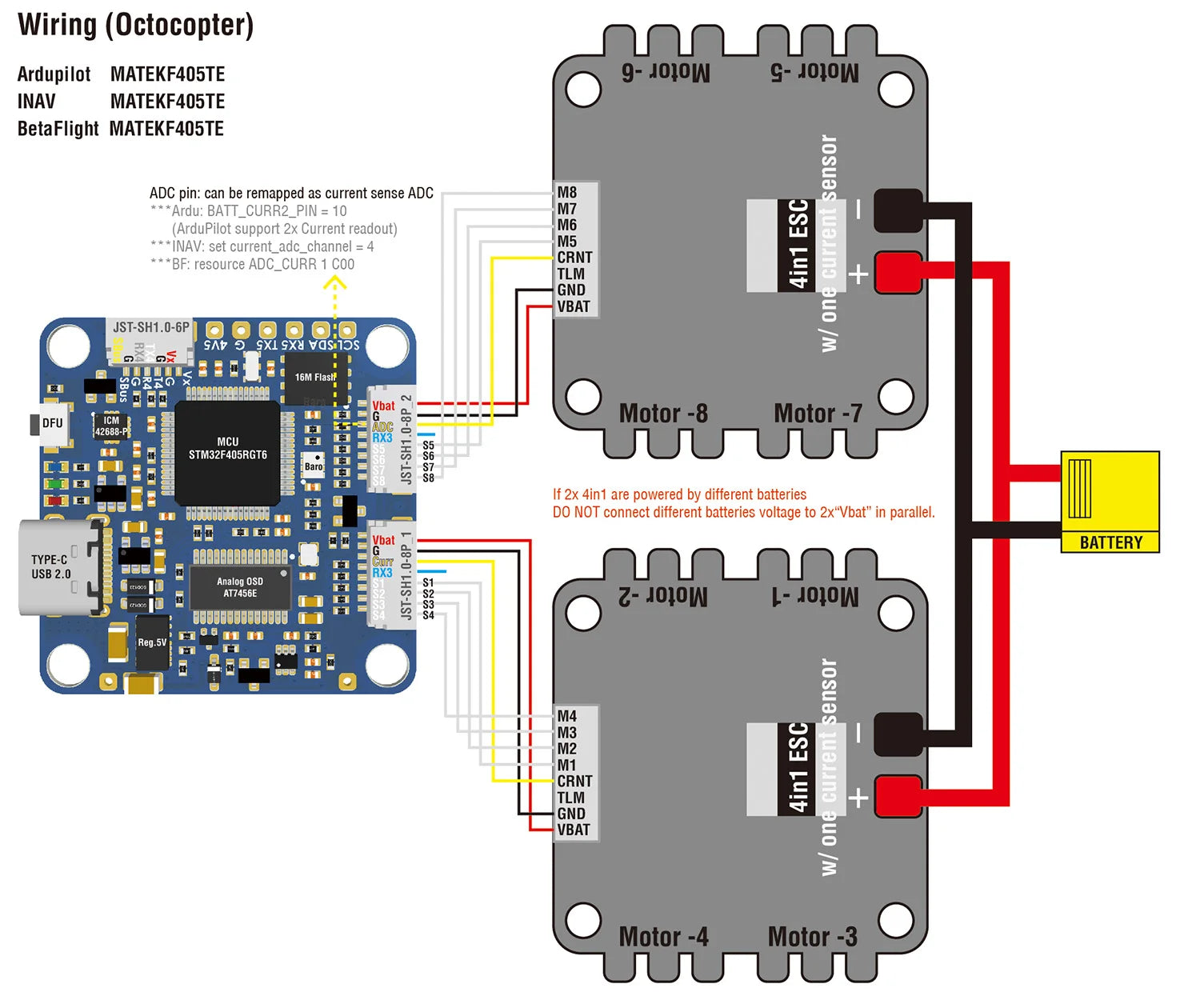
JOIOW INAV MATEKF4OSTE BetaFlight ADC pin: يمكن إعادة تعيينه بالمعنى الحالي ADC M8 1 Ardu: BATT_CURR2_PIN 10 M7 (يدعم ArduPilot قراءات Zx الحالية)
Related Collections