MATEK F405-WTE-وحدة تحكم الطيران Mateksys
MATEK F405-WTE-وحدة تحكم الطيران Mateksys
MATEKSYS
تعذر تحميل توفر الالتقاط
MATEK F405-WTE - مواصفات وحدة التحكم في الطيران Mateksys
الاستخدام: المركبات وألعاب التحكم عن بعد
العمر الموصى به: 12+ص,14+ص
الأصل: البر الرئيسي للصين
المواد: المواد المركبة
اسم العلامة التجارية: MATEKSYS
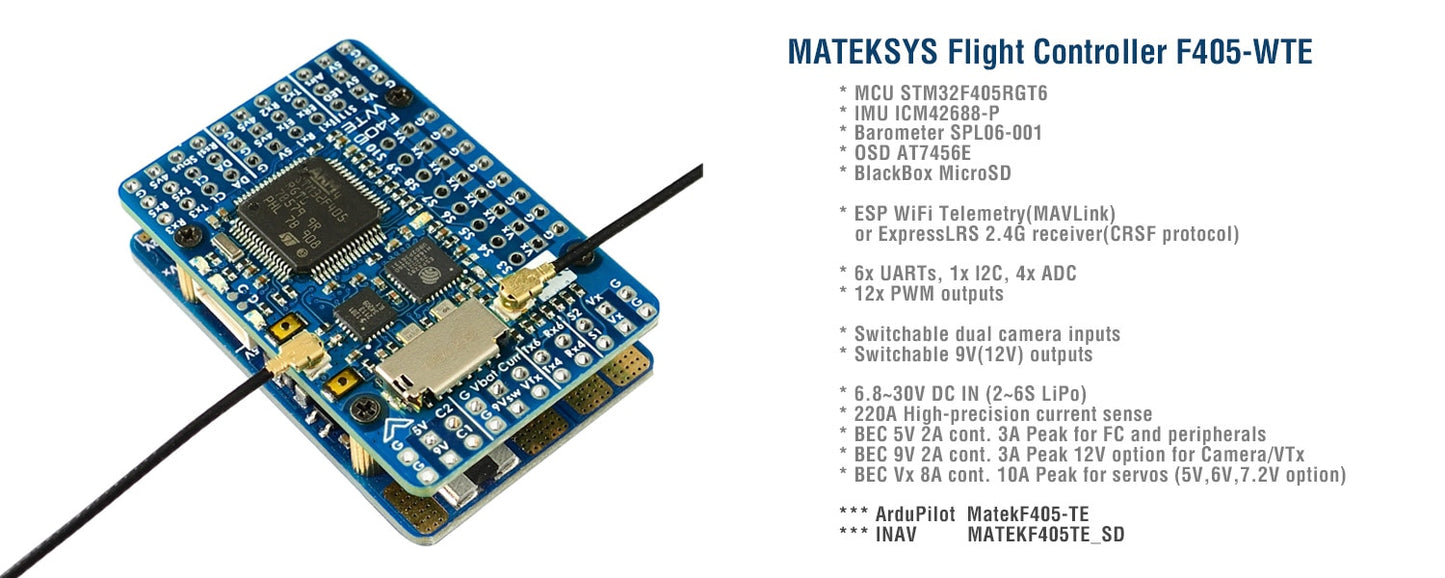
وحدة التحكم في الطيران F405-WTE
STM32F405RGT6، ICM42688P، SPL06، OSD، ESP WIFI القياس عن بعد / جهاز استقبال ELRS 2.4G، 6xUARTs، 12x PWM، 1xI2C
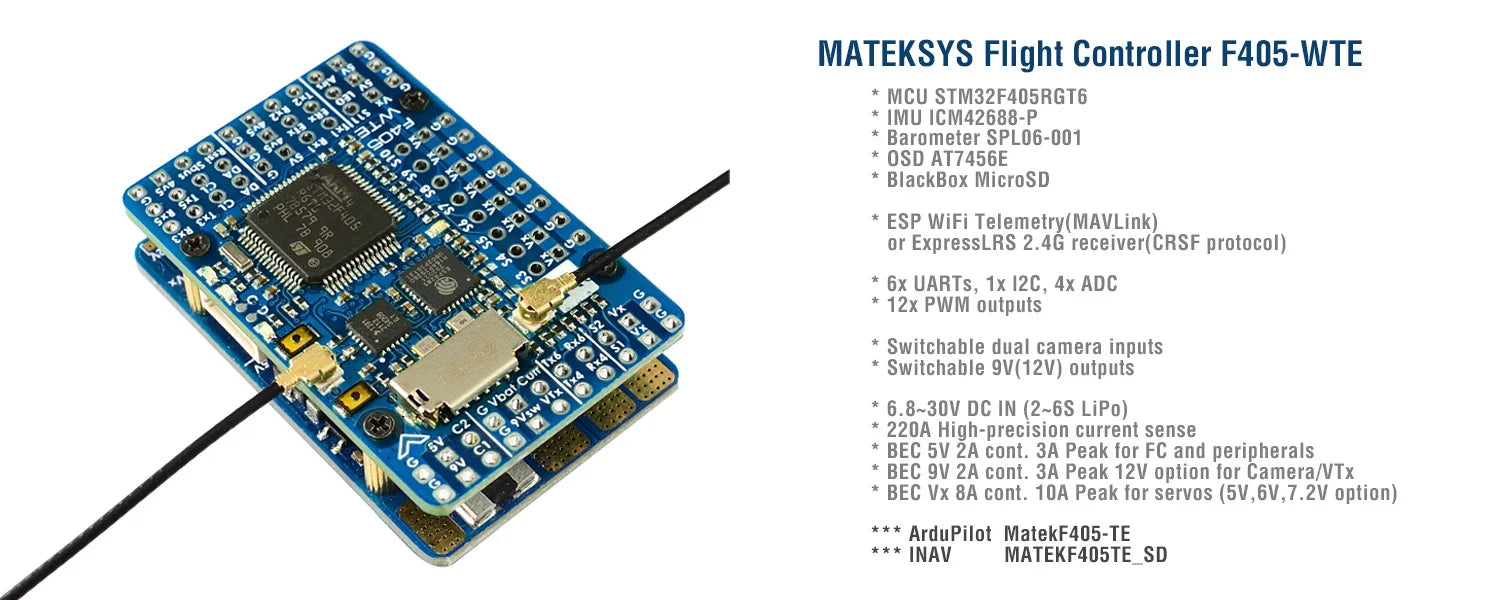
وحدة تحكم الطيران MATEKSYS F4O5-WTE MCU STM3ZFAOSRGT6 IMU ICM42688-P مقياس الضغط SPLO6-001 OSD AT7456E BlackBox MicroSD 2 8 2 2 2 ESP WiFi القياس عن بعد (MAVLink) 2 أو مستقبل ExpressLRS 2.4G (بروتوكول CRSF) 6x UARTs ، Ix I2C ، 4x ADC 85 12x PWM مخرجات مدخلات الكاميرا المزدوجة القابلة للتحويل 4+

مواصفات FC
-
MCU: STM32F405RGT6، 168 ميجاهرتز، فلاش 1 ميجابايت
-
إيمو: ICM42688-P
-
بارو: SPL06-001
-
OSD: AT7456E
-
الصندوق الأسود: فتحة بطاقة MicroSD
-
قياس ESP WiFi عن بعد (MAVLink، 14 ديسيبل ميلي واط)
-
جهاز استقبال ExpressLRS 2.4G (بروتوكول CRSF، القياس عن بعد 12 ديسيبل ميلي واط)
-
6x UARTs، خيار Softserial_Tx 1x (INAV)
-
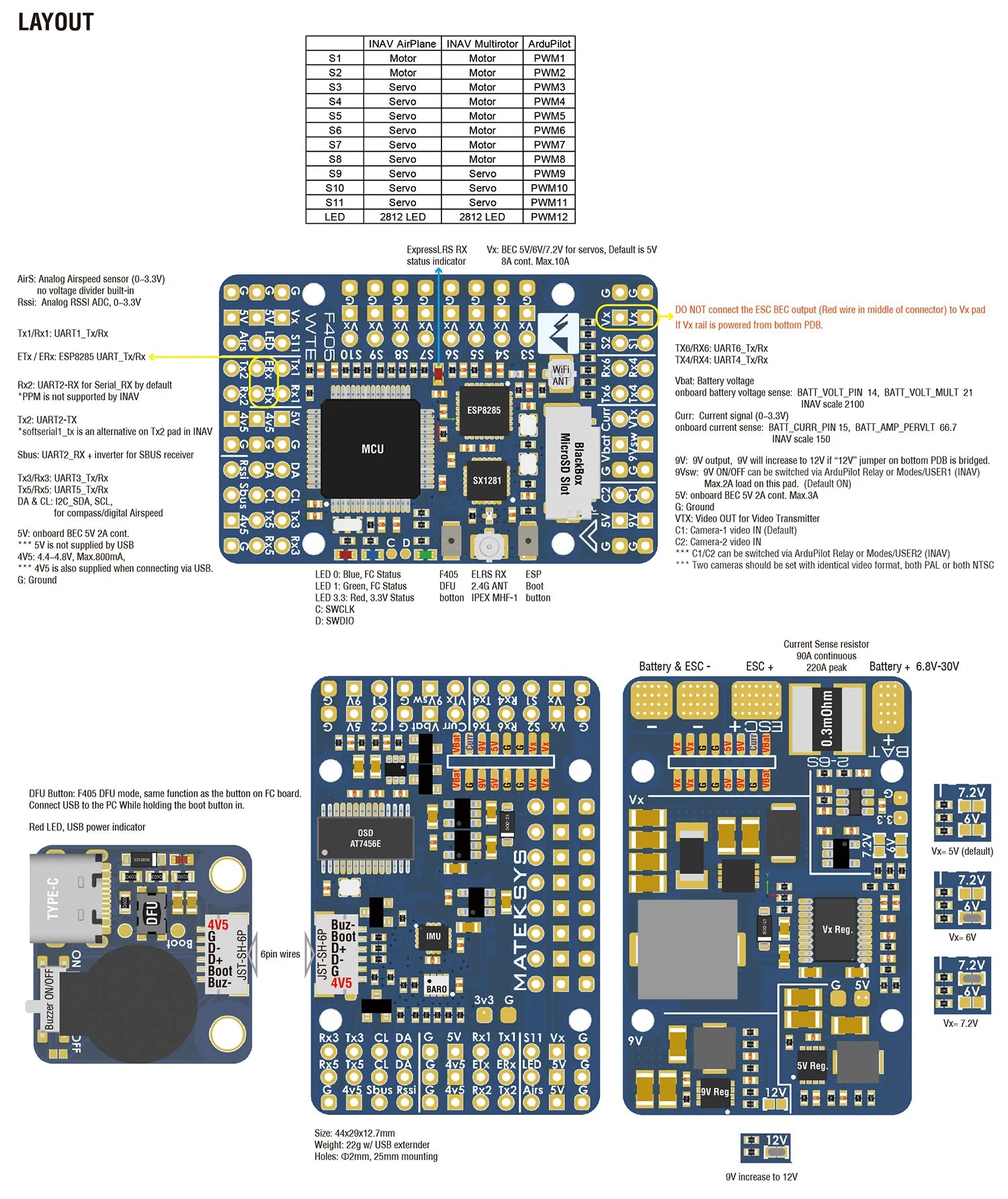
12x مخرجات PWM
-
1xI2C
-
4x ADC (VBAT، التيار، RSSI، السرعة الجوية)
-
موسع USB/الصافرة مع النوع C(USB2.0)
-
مفتاح إدخال الكاميرا المزدوجة
-
9V(12V) لمفتاح الطاقة VTX
البرامج الثابتة FC
-
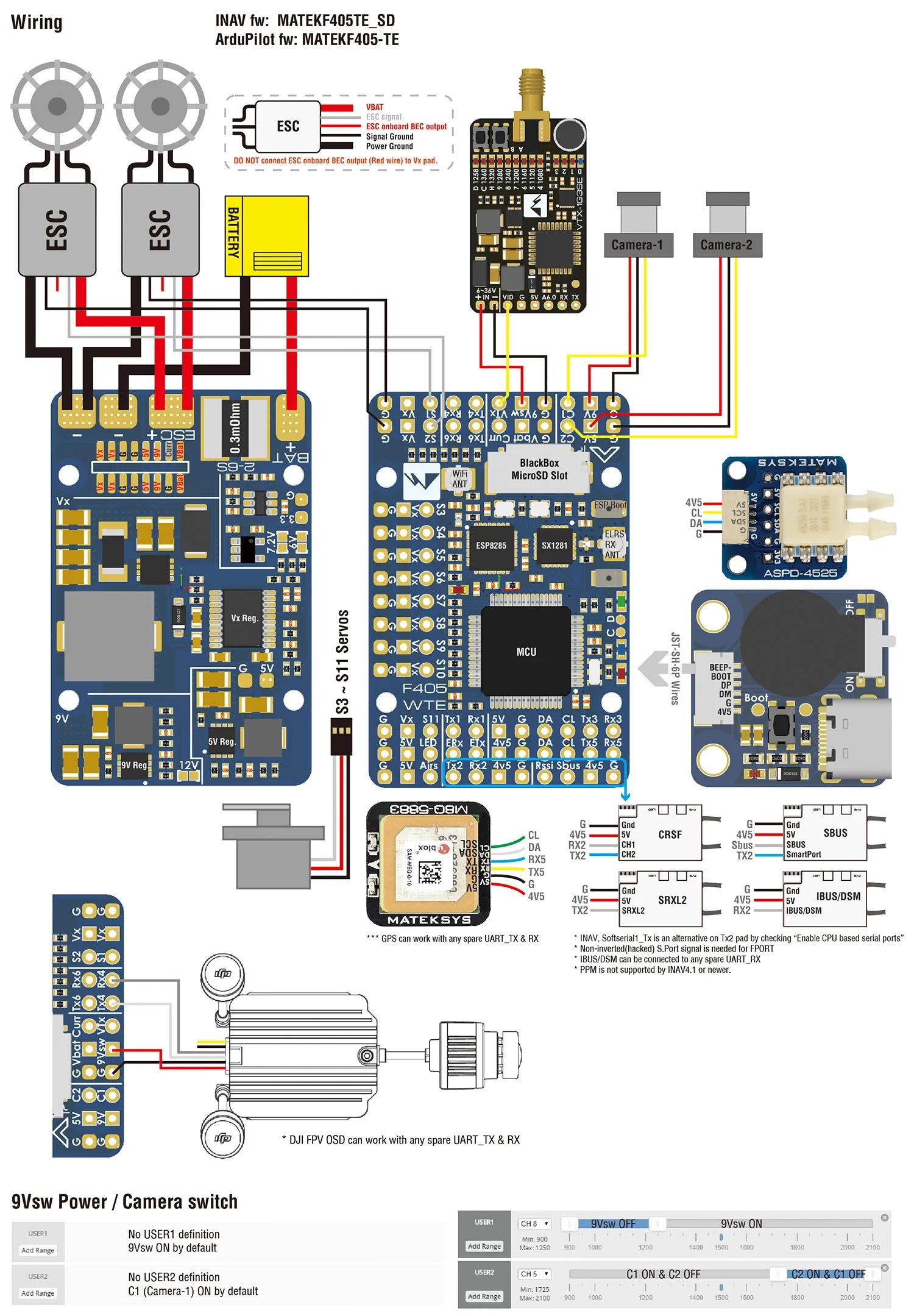
اردو بايلوت: MatekF405-TE
-
INAV: MATEKF405TE_SD (غير متوفر في مكون INAV 4.x)
PDB
-
نطاق جهد الإدخال: 6.8~30 فولت (2~6S LiPo)
-
1x وسادات طاقة ESC
-
مقسم جهد البطارية 1K:20K (مقياس 2100 في INAV، BATT_VOLT_MULT 21.0 في ArduPilot)
-
الحساس الحالي: 220 أمبير، 3.3 فولت ADC (مقياس 150 في INAV، 66.7 A/V في ArduPilot)
-
مقاومة الإحساس: 90 أمبير متواصل، ذروة 220 أمبير
خرج BEC 5V
-
مصمم لوحدة التحكم في الطيران، جهاز الاستقبال، OSD، الكاميرا، الجرس، 2812 LED_Strip، الجرس، وحدة GPS، AirSpeed
-
التيار المستمر: 2 أمبير، بحد أقصى 3 أمبير
خرج BEC 9V /12V
-
مصمم لجهاز إرسال الفيديو والكاميرا وحامل المحور وما إلى ذلك.
-
التيار المستمر: 2 أمبير، الحد الأقصى 3 أمبير
-
خيار 12 فولت مع لوحة التوصيل
-
للحصول على خرج مستقر 9V/12V، يجب أن يكون جهد الإدخال > جهد الخرج +1V
إخراج BEC Vx
-
مصمم للخوادم
-
الجهد قابل للتعديل، 5 فولت افتراضي، 6 فولت أو 7.2 فولت عبر وصلة العبور
-
التيار المستمر: 8 أمبير، الحد الأقصى 10 أمبير
-
لإخراج Vx مستقر، يجب أن يكون جهد الإدخال > جهد Vx +1V
خرج BEC 3.3 فولت
-
مصمم لوحدة Baro / Compass والخارجية 3.الأجهزة الطرفية 3V
-
المنظم الخطي
-
التيار المستمر: 200 مللي أمبير
المادي
-
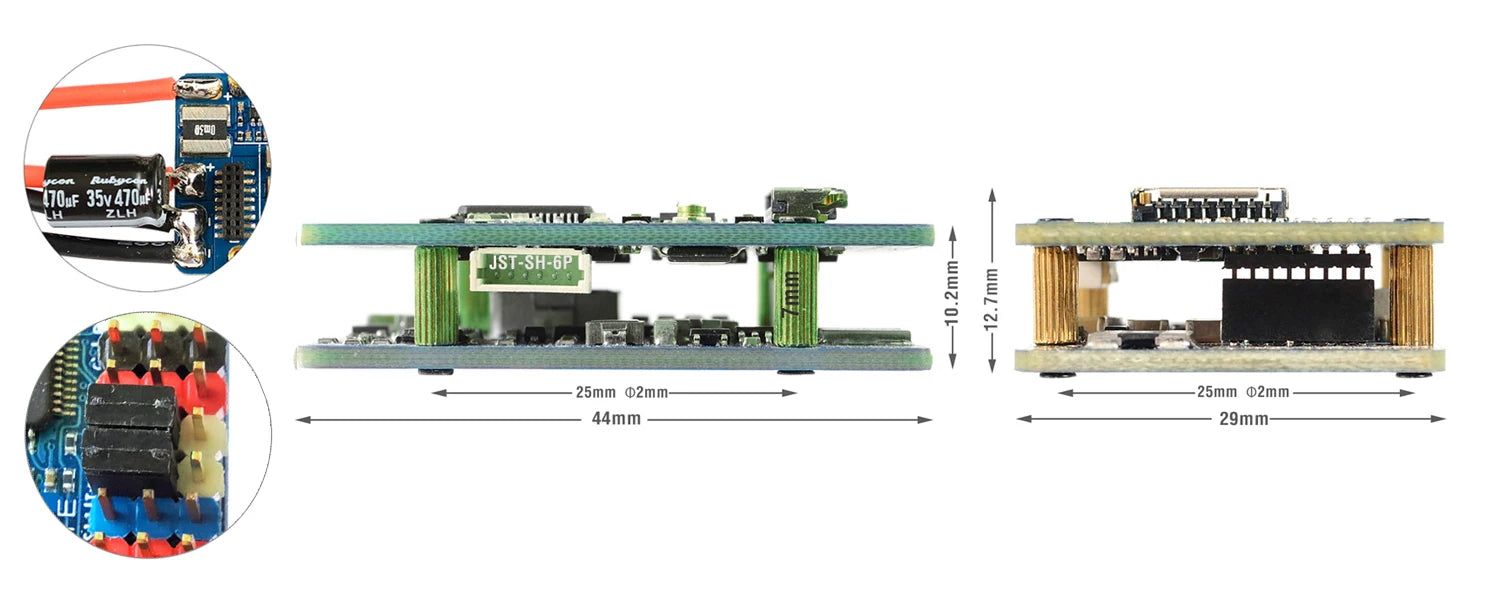
التركيب: 25 × 25 مم، Φ2 مم
-
الأبعاد: 44 × 29 × 12.7 ملم
-
الوزن: 22 جرام مع USB/محول الجرس
بما في ذلك
-
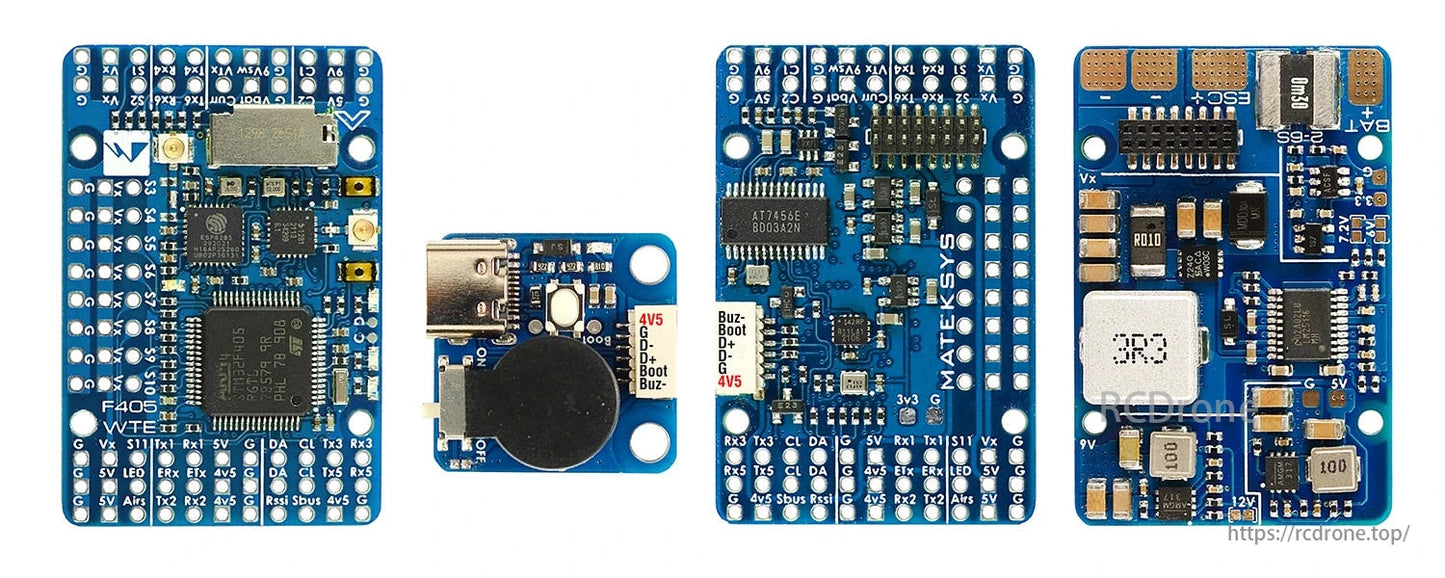
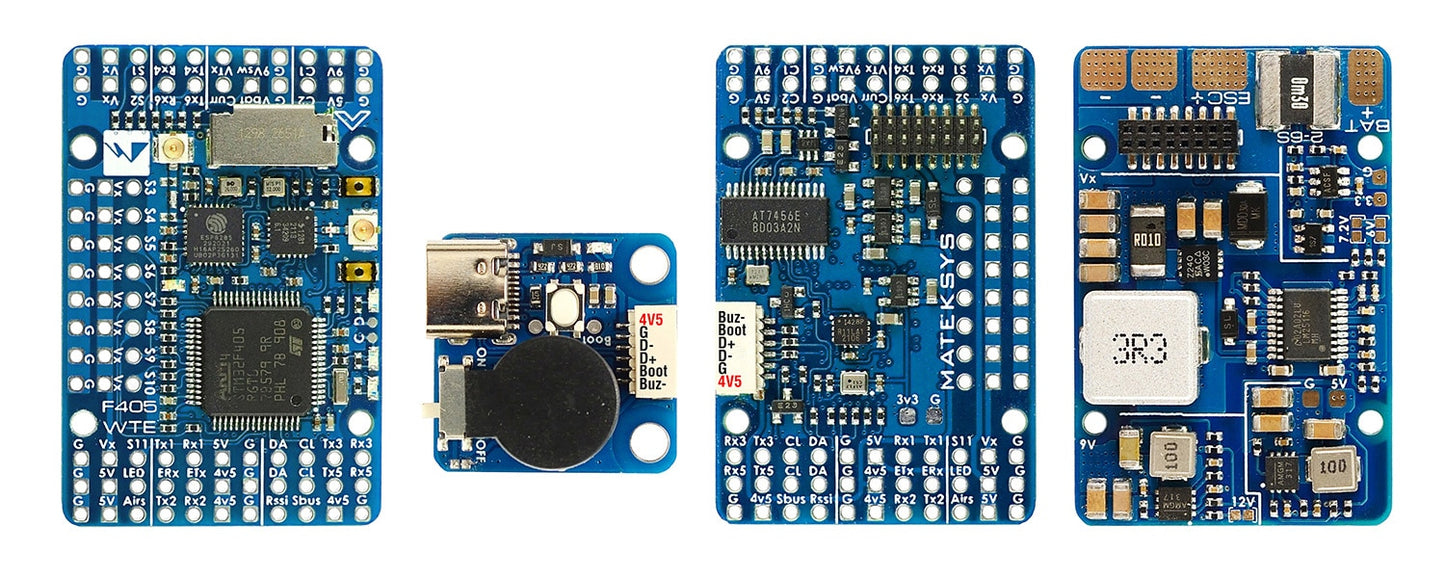
1x F405-WTE
-
1x USB (Type-C)/موسع صوت صفير (جرس سلبي) + كابل JST-SH-6P إلى JST-SH-6P بطول 20 سم لموسع USB.
-
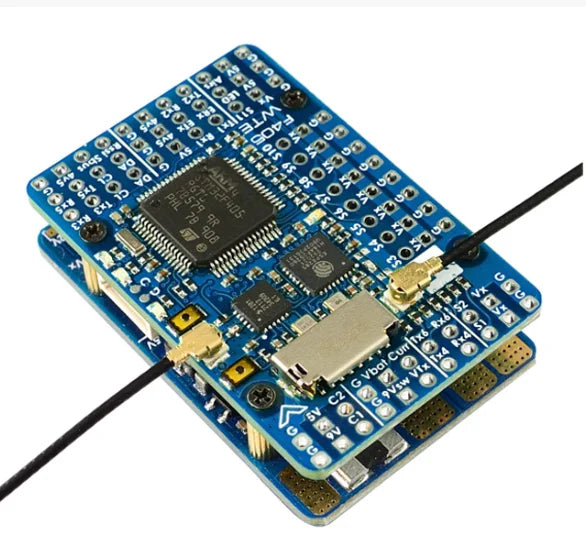
2x هوائيات IPEX-MHF1 2.4G
-
1x مكثف روبيكون ZLH 35V 470 فائق التوهج
-
دوبونت 2.54 دبابيس (يتم شحن اللوحة بدون لحام)
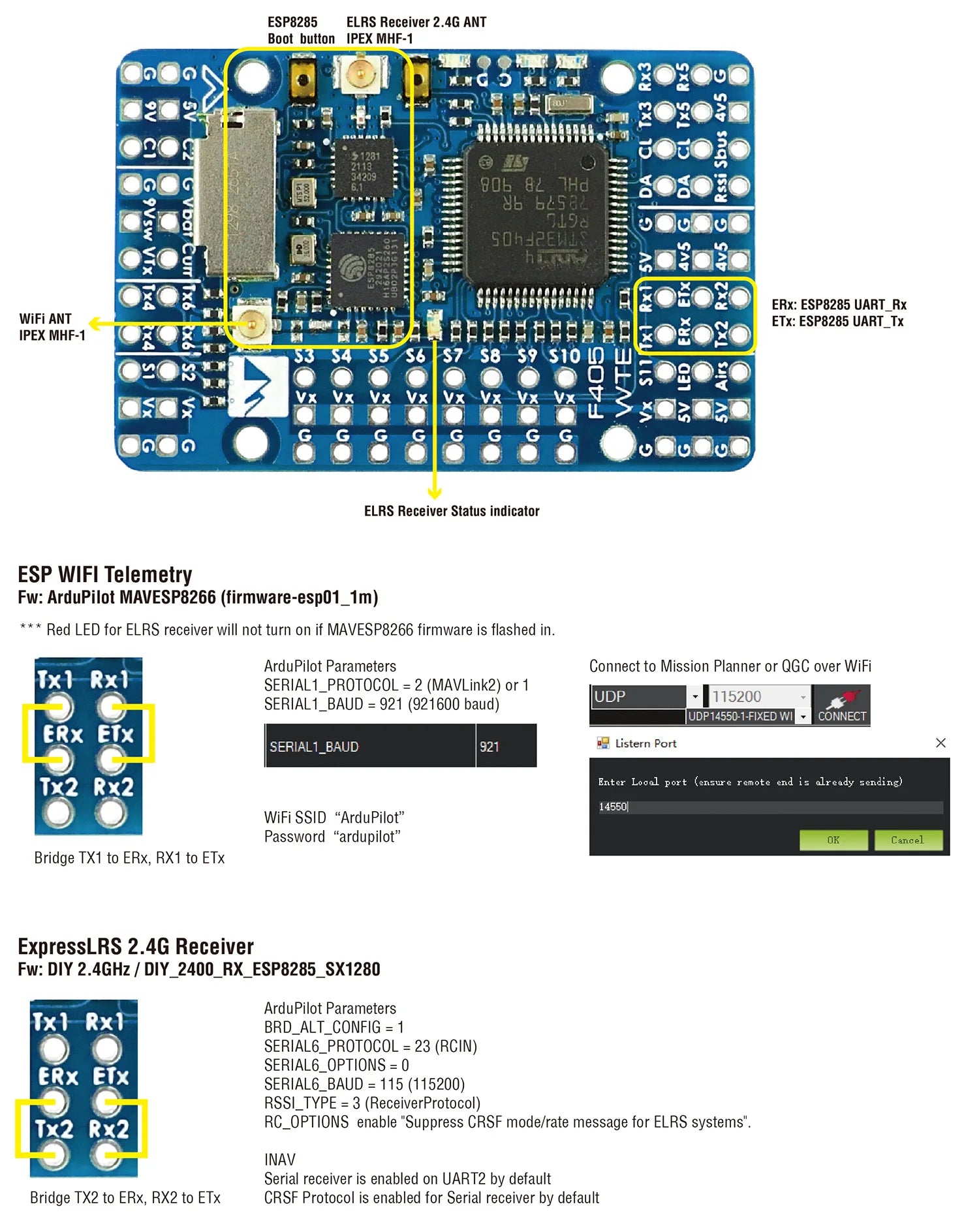
قياس واي فاي عن بعد من ArduPilot ESP8266
-
https://ardupilot.org/copter/docs/common-esp8266-telemetry.html
-
الأداة: ESP_NodeMCU-PyFlasher.exe
-
البرامج الثابتة: firmware-esp01_1m.bin
-
الوميض باستخدام ESP_NodeMCU-PyFlasher
-
قم بتوصيل ESP8285(ETx, ERx) بمحول USB-TTL، مع توصيل ETx الموجود على F405-WTE بـ Rx الموجود على USB-TTL، وERx متصل بـ Tx الخاص بمنفذ USB-TTL. سلك 4v5 وGND من F405-WTE إلى 5V وGND من USB-TTL
-
قم بتوصيل محول USB-TTL بالكمبيوتر أثناء الضغط مع الاستمرار على زر التمهيد ESP8285.
-
افتح ESP_NodeMCU-PyFlasher
-
حدد المنفذ التسلسلي لوحدة USB-TTL، قم بتحميل البرامج الثابتة، حدد "إخراج مزدوج (DOUT)" و"نعم.مسح كافة البيانات"
-
انقر فوق "Flash NodeMCU"
-
بعد الوميض، قم بإيقاف تشغيل الطاقة، ثم قم بتشغيل F405-WTE بواسطة USB أو البطارية.
-
انتظر بضع ثوانٍ، ابحث عن معرف SSID لـ WiFi "ArduPilot"، وكلمة المرور هي "ardupilot"
-
نصائح: لن يتم تشغيل مؤشر LED الأحمر لجهاز استقبال ELRS إذا تم وميض البرنامج الثابت MAVESP8266.
-
جهاز استقبال ExpressLRS 2.4G
-
ExpressLRS AUX1-AUX8 ليست بدقة كاملة CH. https://www.expresslrs.org/2.0/software/switch-config/
-
الوميض عبر WiFi
-
قم بتشغيل F405-WTE عبر USB، وسيومض مؤشر LED الخاص بجهاز الاستقبال (باللون الأحمر) ببطء في البداية، وبعد 30 ثانية، من المفترض أن يومض بسرعة للإشارة إلى أنه في وضع WiFi Hotspot.
-
خطوات أكثر تفصيلاً، الرجاء الرجوع إلى هذه الصفحة.
-
الهدف: DIY 2.4 جيجا هرتز / DIY_2400_RX_ESP8285_SX1280
-
-
الوميض عبر UART
-
قم بتوصيل ESP8285(ETx, ERx) بمحول USB-TTL، مع توصيل ETx الموجود على F405-WTE بـ Rx الموجود على USB-TTL، وERx متصل بـ Tx الخاص بمنفذ USB-TTL. سلك 4v5 وGND من F405-WTE إلى 5V وGND من USB-TTL.
-
قم بتوصيل محول USB-TTL بالكمبيوتر أثناء الضغط مع الاستمرار على زر التمهيد ESP8285.
-
حدد الهدف اصنع بنفسك 2.4 جيجا هرتز / DIY_2400_RX_ESP8285_SX1280 و "
039>UART" بالنسبة لأسلوب الوميض، اضبط عبارة الربط وخيارات البرامج الثابتة وبعد الانتهاء، انقر على إنشاء وفلاش.
-
اتصال UDP مع مكون INAV عبر WiFi
-
الأداة: ESP_NodeMCU-PyFlasher.exe
-
البرامج الثابتة: MSPWifiBridge_ESP-01.bin تم تجميعها استنادًا إلى github.com/Scavanger/MSPWifiBridge
-
التفليش باستخدام ESP_NodeMCU-PyFlasher
-
قم بتوصيل ESP8285(ETx, ERx) بمحول USB-TTL، مع توصيل ETx الموجود على F405-WTE بـ Rx الموجود على USB-TTL، وERx متصل بـ Tx الخاص بمنفذ USB-TTL. سلك 4v5 وGND من F405-WTE إلى 5V وGND من USB-TTL
-
قم بتوصيل محول USB-TTL بالكمبيوتر أثناء الضغط مع الاستمرار على زر التمهيد ESP8285.
-
افتح ESP_NodeMCU-PyFlasher
-
حدد المنفذ التسلسلي لوحدة USB-TTL، قم بتحميل البرامج الثابتة، حدد "إخراج مزدوج (DOUT)" و"نعم.مسح كافة البيانات"
-
انقر فوق "Flash NodeMCU"
-
بعد الوميض، قم بإيقاف تشغيل الطاقة، ثم قم بتشغيل F405-WTE بواسطة USB أو البطارية.
-
انتظر بضع ثوانٍ، ابحث عن معرف SSID لشبكة WiFi "MSPWifiBridge"، وكلمة المرور هي "123456789"
-
إذا لم تكن هناك إعادة توجيه تلقائية إلى صفحة التكوين، فانتقل إلى http://192.168.4.1 يدويًا. بيانات تسجيل الدخول القياسية: اسم المستخدم: admin، كلمة المرور: 123456789
-
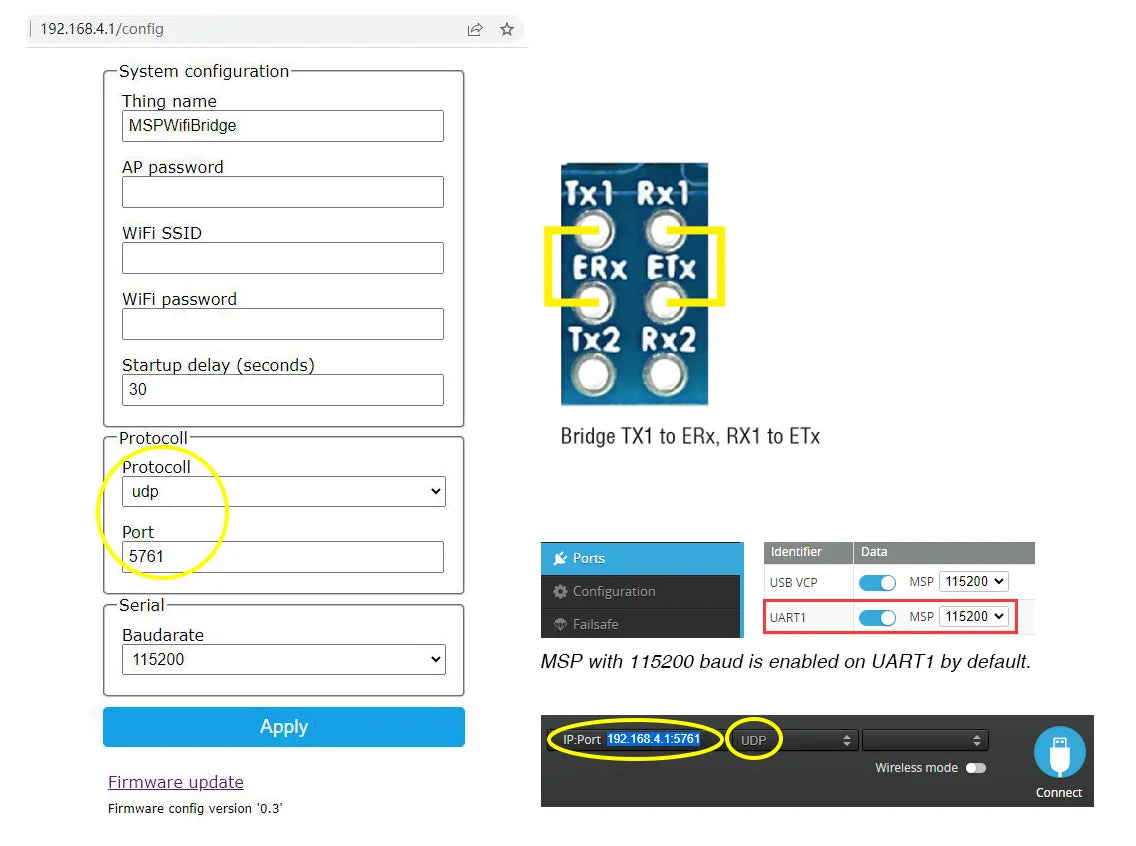
192.168.4.1/config تكوين النظام Thing_name MSPWifiBridge AP كلمة المرور Ixl Rx| WiFi SSID ERx ETx كلمة مرور WiFi Tx2 Rx2 Staz تأخير (ثواني 30 Protocoll Bridge TX1 إلى erx، RXI إلى ETx Protocoll udp Port 5761 Ponts Identifier Data USB VC?
Related Collections