MATEK H743-MINI V3-وحدة تحكم الطيران Mateksys
MATEK H743-MINI V3-وحدة تحكم الطيران Mateksys
MATEKSYS
تعذر تحميل توفر الالتقاط
MATEK H743-MINI V3 - مواصفات وحدة التحكم في الطيران Mateksys
الاستخدام: المركبات وألعاب التحكم عن بعد
العمر الموصى به: 12+y,14+y,3-6y,6-12y,0-3y
الأصل: البر الرئيسي للصين
المواد: المواد المركبة
اسم العلامة التجارية: MATEKSYS
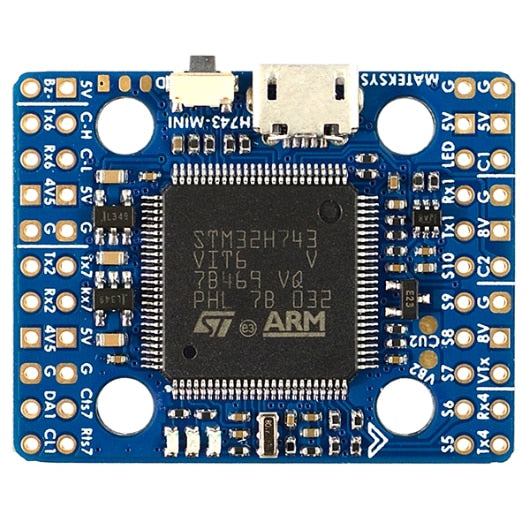
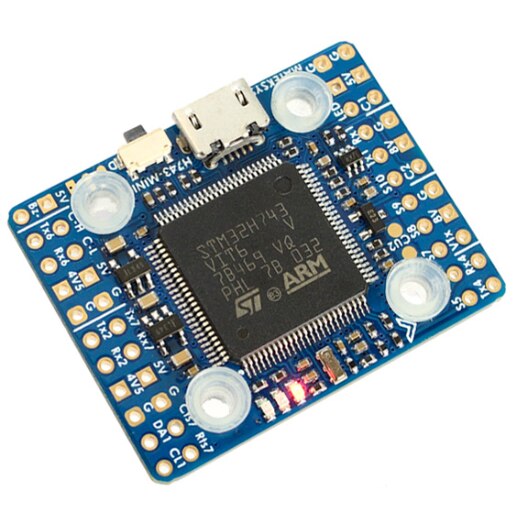
وحدة التحكم في الطيران H743-MINI
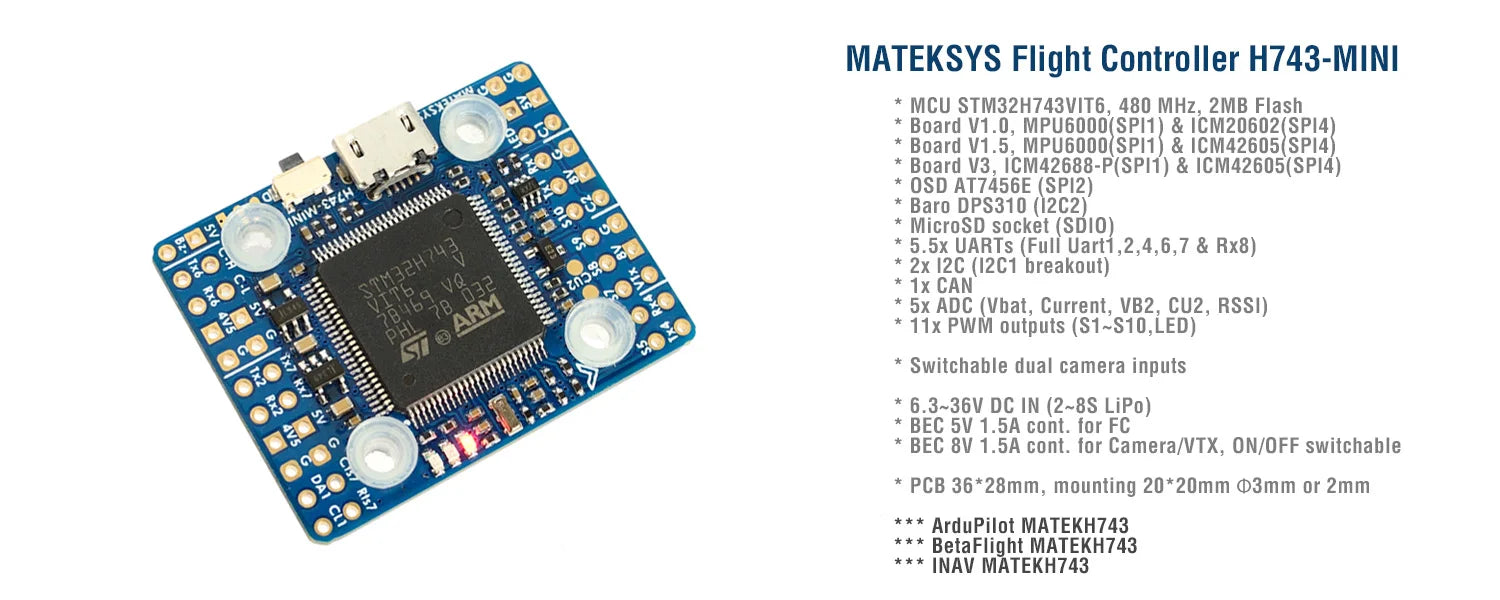
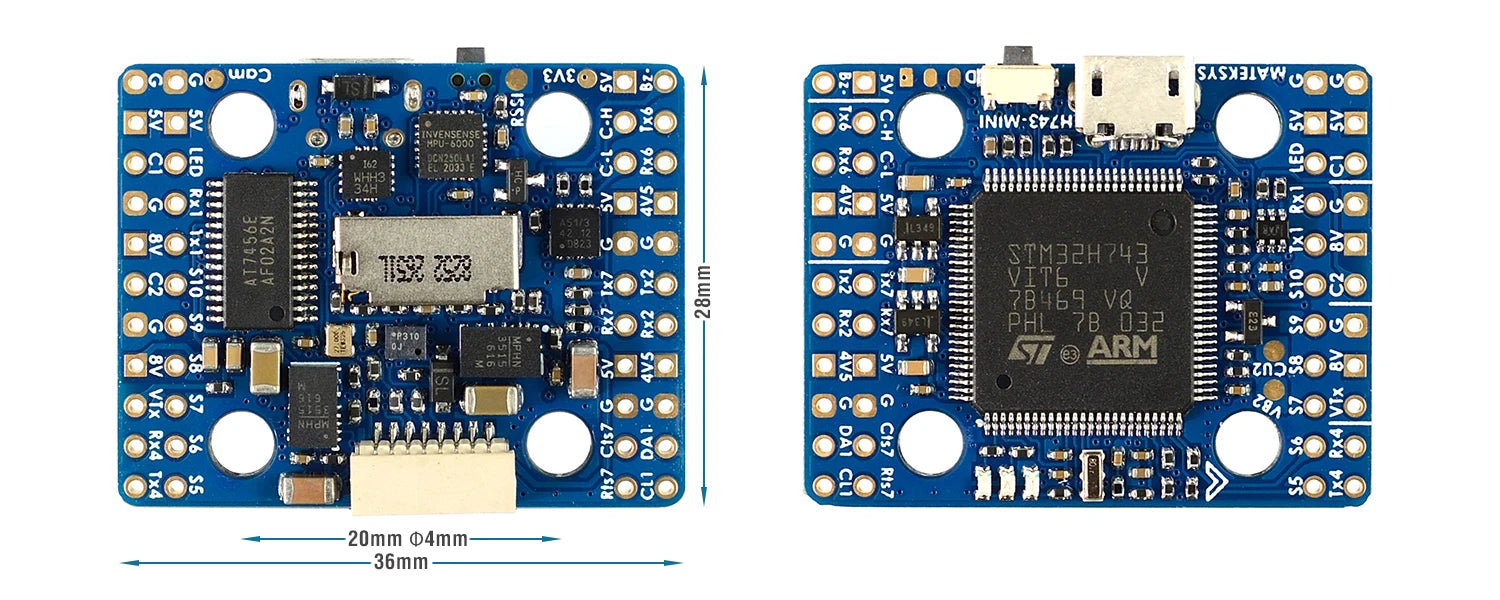
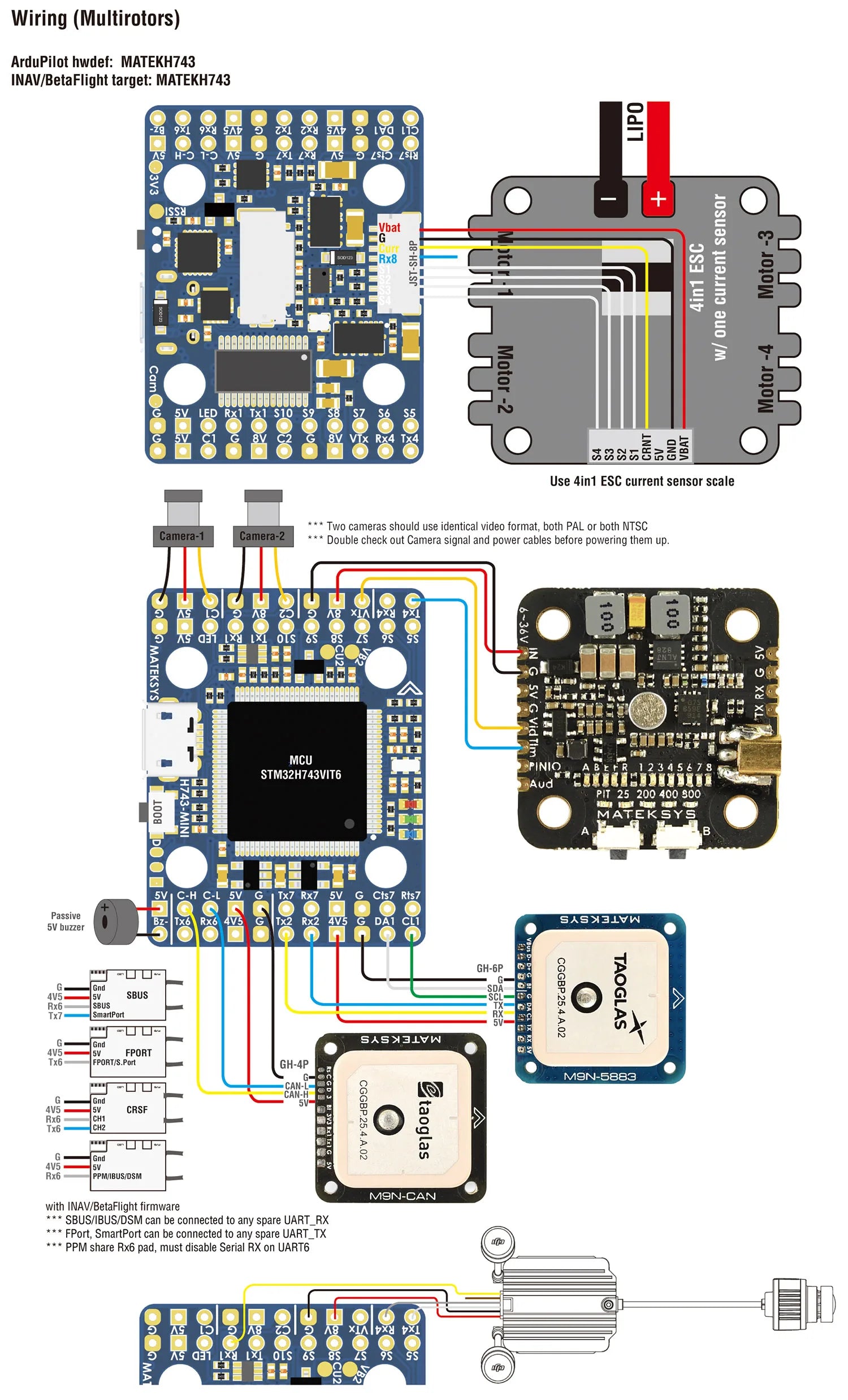
STM32H743VIT6، ICM20602 & MPU6000، DPS310، OSD، 5.5x UARTs، 2x I2C، 1x CAN، 11x مخرجات PWM، BEC5V، BEC8V
مواصفات FC
-
MCU: STM32H743VIT6، 480 ميجا هرتز، 1 ميجا بايت رام، 2 ميجا بايت فلاش
-
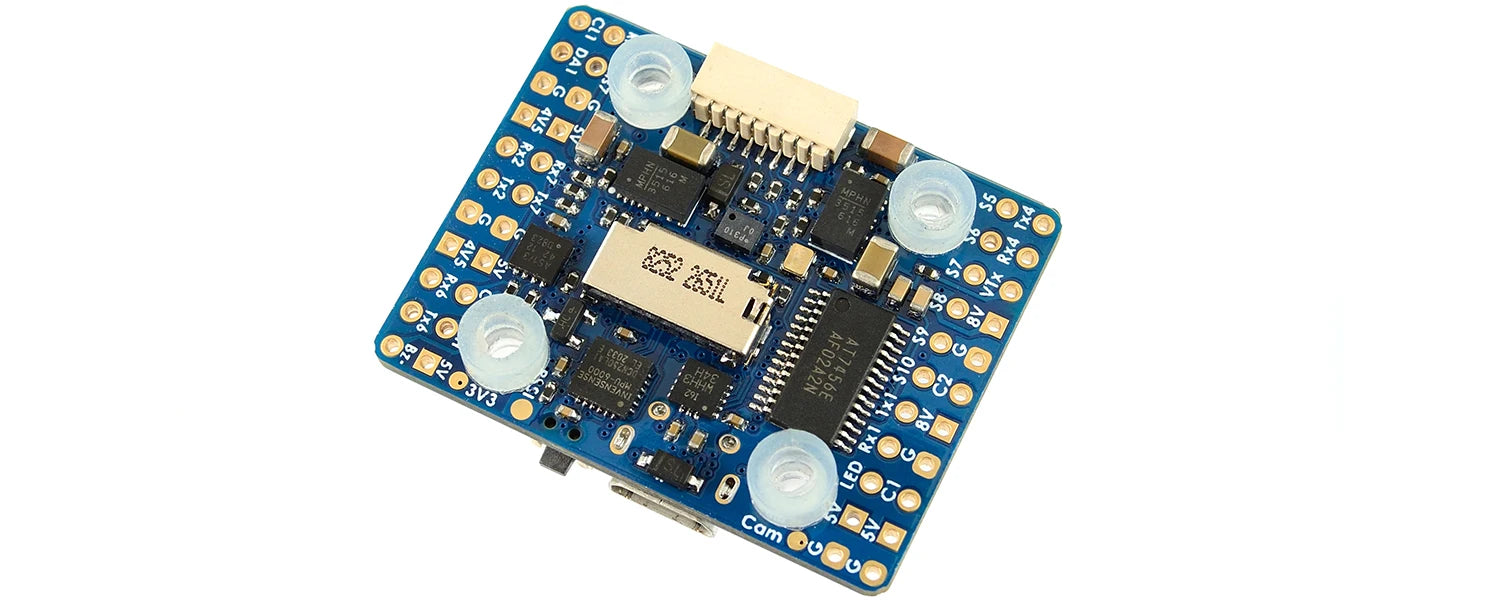
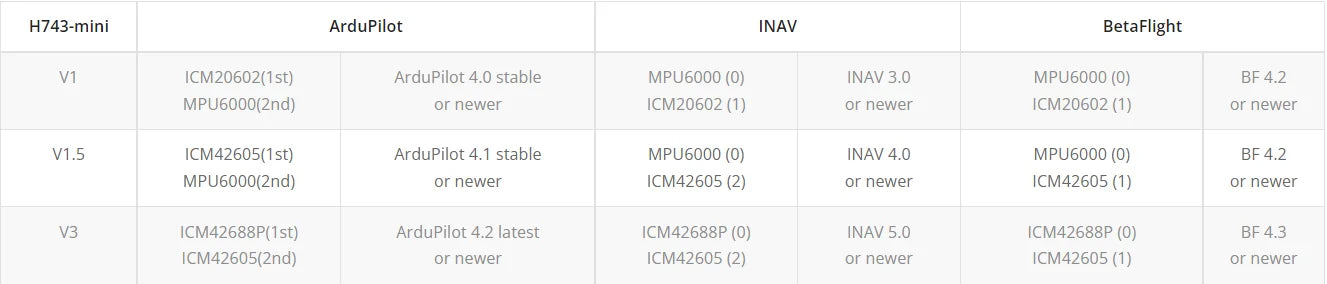
اللوحة V1.0 IMU: MPU6000 (SPI1) وICM20602 (SPI4)
-
اللوحة V1.5 IMU: MPU6000 (SPI1) وICM42605 (SPI4)
-
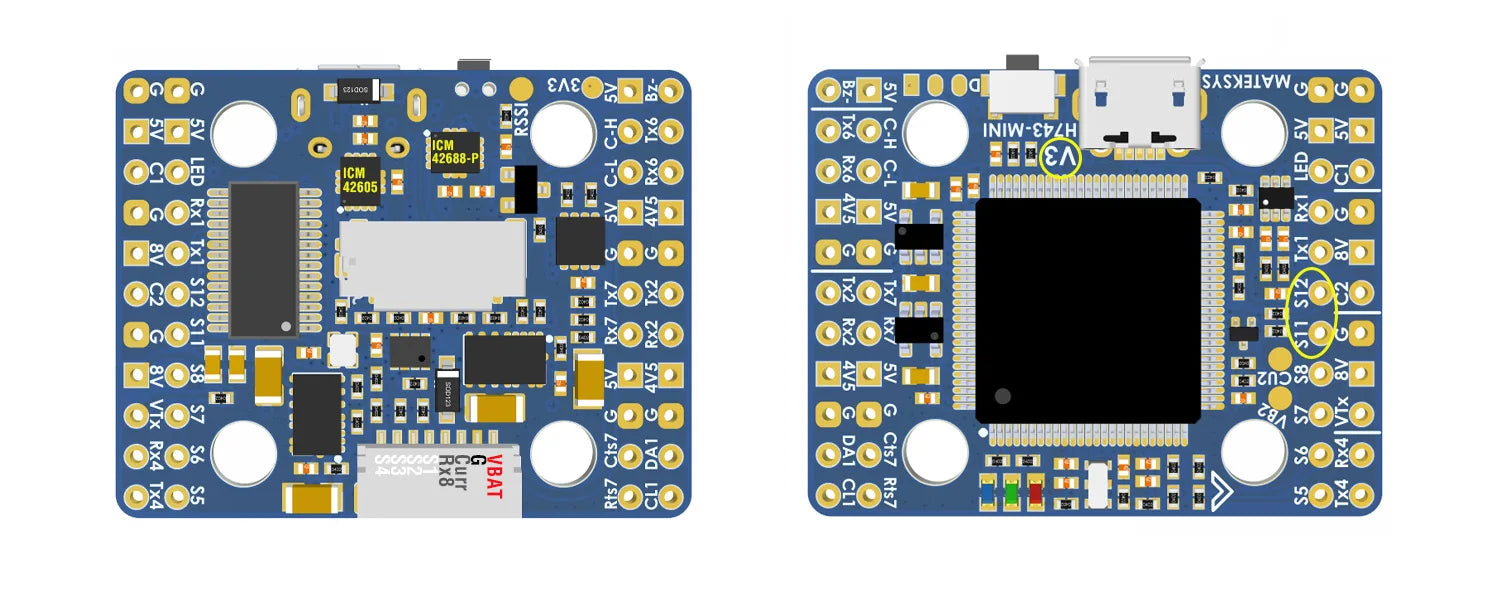
اللوحة V3 IMU: ICM42688-P (SPI1) وICM42605 (SPI4)
-
بارو: إنفينيون DPS310 (I2C2)
-
OSD: AT7456E (SPI2)
-
الصندوق الأسود: مقبس بطاقة MicroSD (SDIO)
-
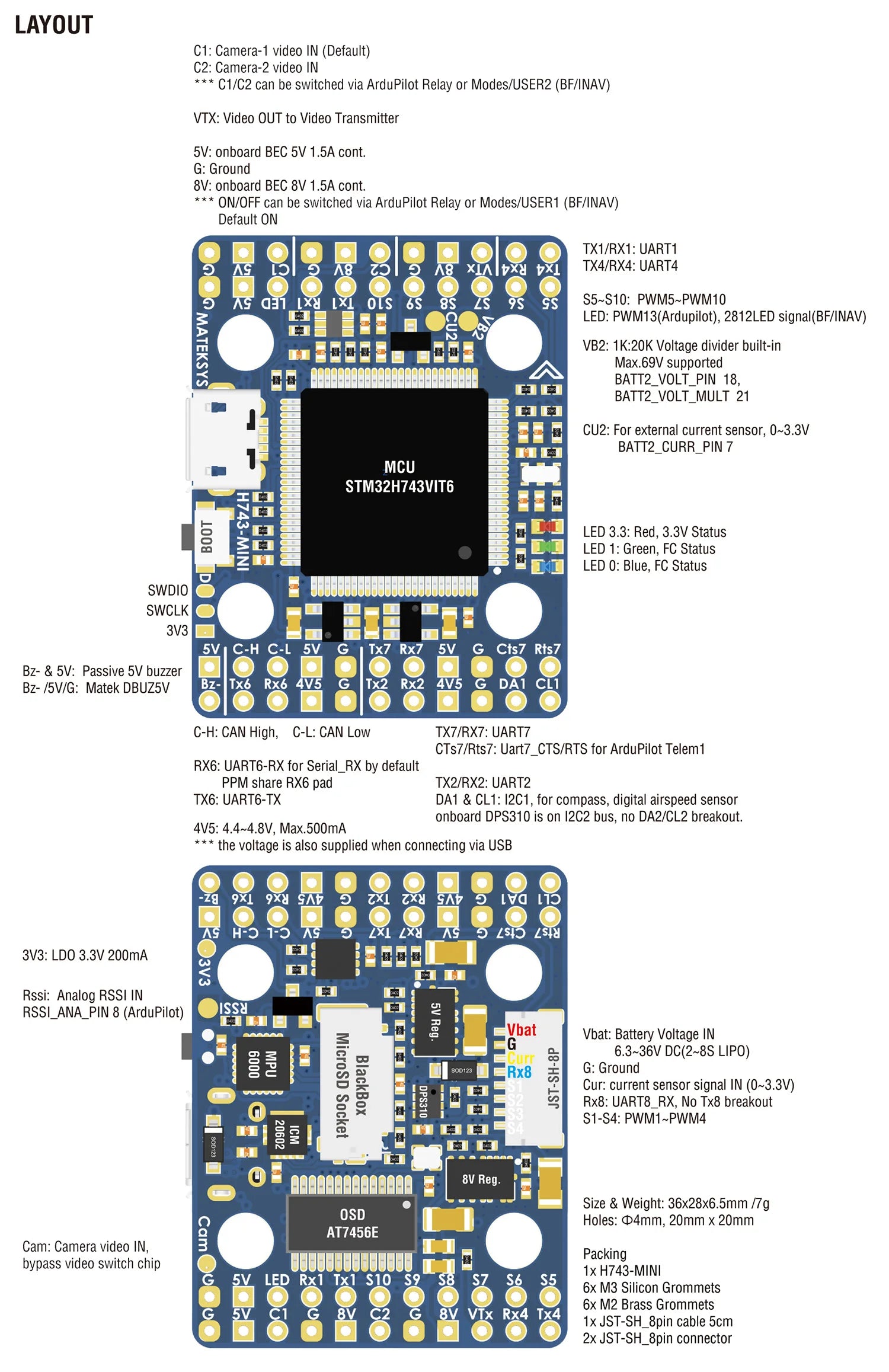
5.5x Uarts (1,2,4,6,7, Rx8)
-
11x مخرجات PWM
-
2x I2C (وسادات I2C1/DA1 CL1، بدون اختراق I2C2)
-
1x CAN (وسادات CH، C-L)
-
5x ADC (VBAT، الحالي، RSSI، VB2، CU2)
-
3x مصابيح LED لحالة FC (أزرق، أحمر) ومؤشر 3.3 فولت (أحمر)
-
1x موصل JST-SH1.0_8pin (Vbat/G/Curr/Rx8/S1/S2/S3/S4)
-
مفتاح إدخال الكاميرا المزدوجة
-
مفتاح تشغيل/إيقاف الطاقة 8 فولت
الطاقة
-
مدخل Vbat: 6.3~36 فولت (2~8S LiPo)
-
بيك: 5 فولت 1.5 أمبير تابع. (الحد الأقصى 2 أ)
-
بيك: 8 فولت 1.5 أمبير تابع. (الحد الأقصى 2 أمبير)، 8 فولت يخرج بشكل ثابت عندما يكون Vbat>=10V، 8V يخرج 80% من Vbat عندما يكون Vbat< 10V
-
إل دي أو 3.3 فولت: 200 مللي أمبير
-
تدعم لوحة VB2 الحد الأقصى. 69 فولت (مقسم الجهد 1 ك: 20 ك)
-
الطاقة الساكنة: 200mA@5V with Betaflight، 150mA@5V with ArduPilot
البرامج الثابتة FC
-
اردو بايلوت (تشيبي أو إس): MATEKH743
-
بيتا فلايت: MATEKH743
-
إيناف: MATEKH743
المادي
-
التركيب
-
20 × 20 مم/Φ3 مم مع حلقات السيليكون
-
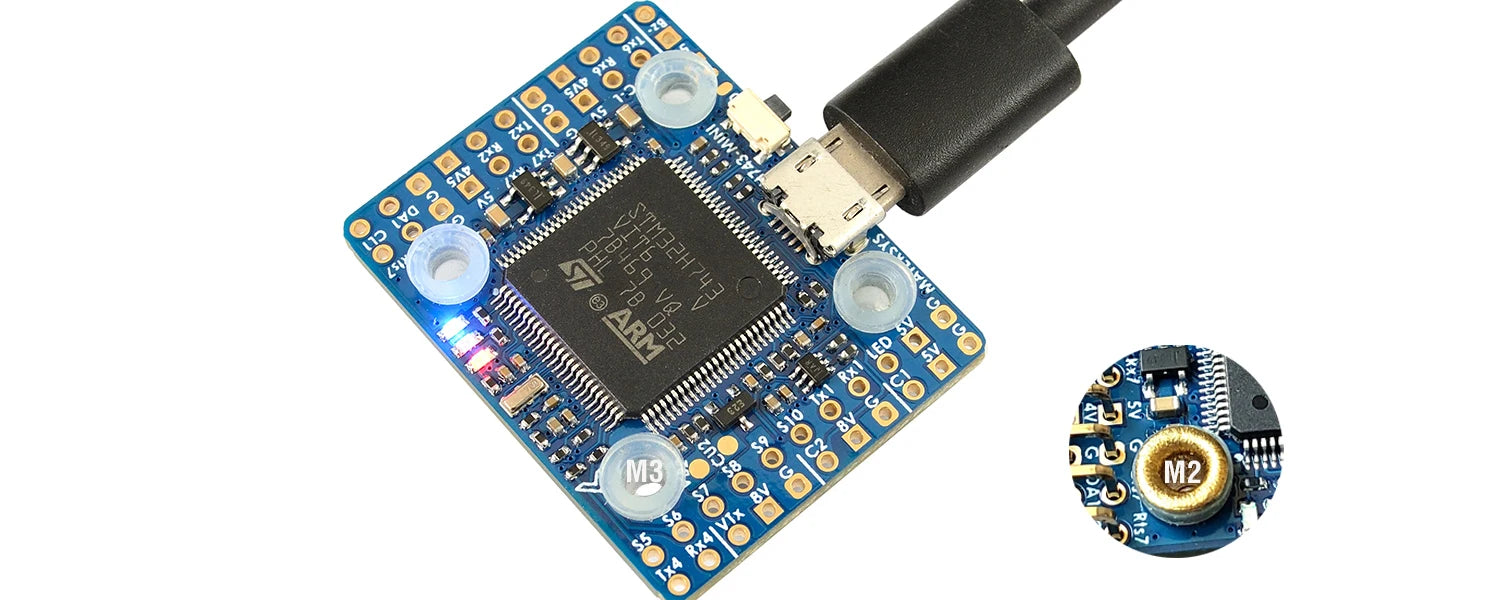
20 × 20 مم/Φ2 مم مع حلقات السيليكون والنحاس
-
-
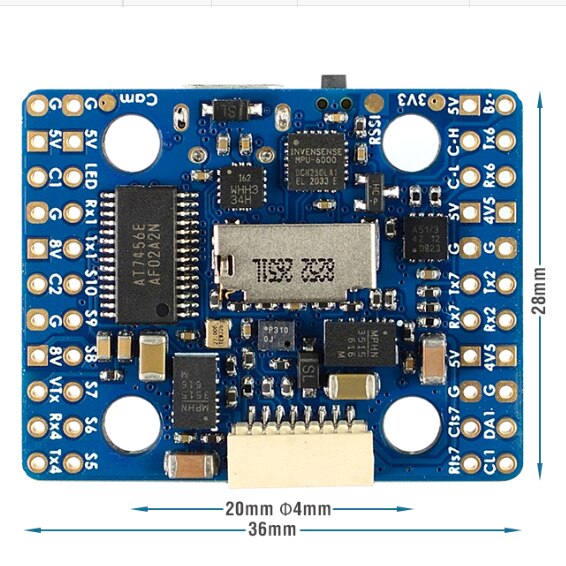
الأبعاد: 36 × 28 × 6.5 ملم
-
الوزن: 7 جرام
بما في ذلك
-
1x H743-MINI
-
6x حلقات سيليكون من M4 إلى M3
-
6x الحلقات النحاسية من M3 إلى M2
-
1x كابل JST-SH1.0_8pin، 5 سم
-
2x موصلات JST-SH1.0_8pin
ما الجديد في H743-mini V3
-
ICM42688-P+ICM42605 بدلاً من MPU6000+ICM42605
-
PWM 10 و11 بدلاً من PWM9 و10(V1/V1.5)
-
الوظائف والتخطيطات والمكونات الأخرى هي نفسها الموجودة في إصدار اللوحة السابق.
-
يحتوي H743-mini V3 على betaflight_4.3.0 تم تحميله مسبقًا لمراقبة الجودة
اردو بايلوت
-
يتم دعم H743-mini-V3 مع ICM42688-P بواسطة ArduPilot 4.2 أو أعلى،
-
تم تعريف ICM42688-P على أنه IMU الأول (IMU0)، ICM42605 هو الثاني (IMU1).
-
مع ArduPilot 4.2، اضبط INS_ENABLE_MASK على 7 أو 127 الافتراضي.
-
يوصى باستخدام STM32CubeProgrammer لمسح MCU وتحميل البرامج الثابتة. راجع هذه المدونة http://www.mateksys.com/?p=6905
إيناف
-
H743-mini-V3 غير مدعوم بواسطة INAV4.1 الذي تم تنزيله من أداة التهيئة. الرجاء التنزيل inav_4.1.0_MATEKH743_42688 من موقعنا.
-
بدءًا من INAV5.0، سيشارك V1/V1.5/V3 نفس البرامج الثابتة.
بيتا فلايت
-
يتم دعم IMU ICM42688-p بواسطة BetaFlight 4.3 أو أعلى.
-
icm42688-p هو IMU الأول (افتراضي)، ICM42605 هو IMU الثاني.
-
الهدف MATEKH743 في قائمة BetaFlight 4.2.x لا يدعم سلسلة ICM426XX، تحتاج إلى تفليشه باستخدام BF4.3_RC أو الأحدث