وحدة GPS وبوصلة MATEKSYS M9N-5883 GNSS، u-blox NEO-M9N + QMC5883L، موصل JST-GH-6P
وحدة GPS وبوصلة MATEKSYS M9N-5883 GNSS، u-blox NEO-M9N + QMC5883L، موصل JST-GH-6P
MATEKSYS
سعر عادي
$64.99 USD
سعر عادي
سعر البيع
$64.99 USD
سعر الوحدة
per
Taxes included.
الشحن محسوب عند السداد.
تعذر تحميل توفر الالتقاط
نظرة عامة
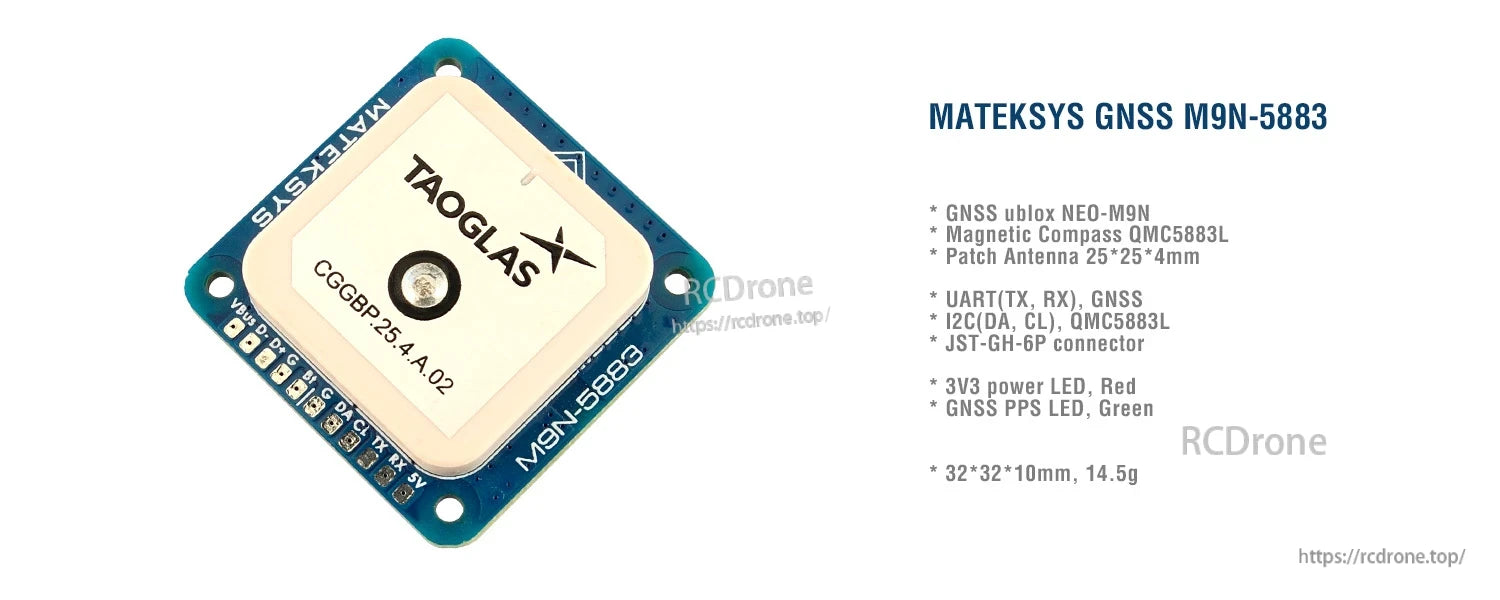
وحدة GPS MATEKSYS M9N-5883 GNSS & هي مستقبل GNSS متعدد الكواكب يعتمد على u-blox NEO-M9N، ومزودة ببوصلة مغناطيسية QMC5883L. مع بنية أمامية RF متعددة النطاقات، يمكنها استقبال GPS وGalileo وGLONASS وBeiDou في وقت واحد.
الميزات الرئيسية
- GNSS: مستقبل متزامن u-blox NEO-M9N (GPS، GLONASS، Galileo، BeiDou)
- بوصلة مغناطيسية: QMC5883L
- واجهات: UART (TX، RX) لـ GNSS؛ I2C (DA، CL) للبوصلة
- موصل JST-GH-6P
- LED الحالة: LED طاقة 3.3V (أحمر)؛ LED GNSS PPS (أخضر)، يومض (1Hz) عندما يكون GNSS في حالة تثبيت ثلاثي الأبعاد
- إعادة تعيين المستقبل: توصيل "RST" بالأرض لمدة 100 مللي ثانية على الأقل يؤدي إلى بدء بارد (خيار استرداد)
خدمة العملاء: [email protected] (أو https://rcdrone.top/).
المواصفات
| جهاز استقبال GNSS | u-blox NEO-M9N |
| الأقمار الصناعية المدعومة | GPS، GLONASS، Galileo، BeiDou |
| البوصلة المغناطيسية | QMC5883L |
| هوائي رقعة | 25*25*4مم |
| نطاق جهد الإدخال | 4~5.5V (5V pad/pin) |
| استهلاك الطاقة | 50mA |
| معدل باود UART | 38400 افتراضي |
| درجات حرارة التشغيل | -20~80 °C |
| واجهة GNSS | UART (TX, RX) |
| واجهة البوصلة | I2C (DA, CL) |
| موصل | JST-GH-6P |
| مؤشرات LED | LED طاقة 3.3V (أحمر)؛ LED GNSS PPS (أخضر)، يومض (1Hz) عندما يكون GNSS ثابتًا ثلاثي الأبعاد |
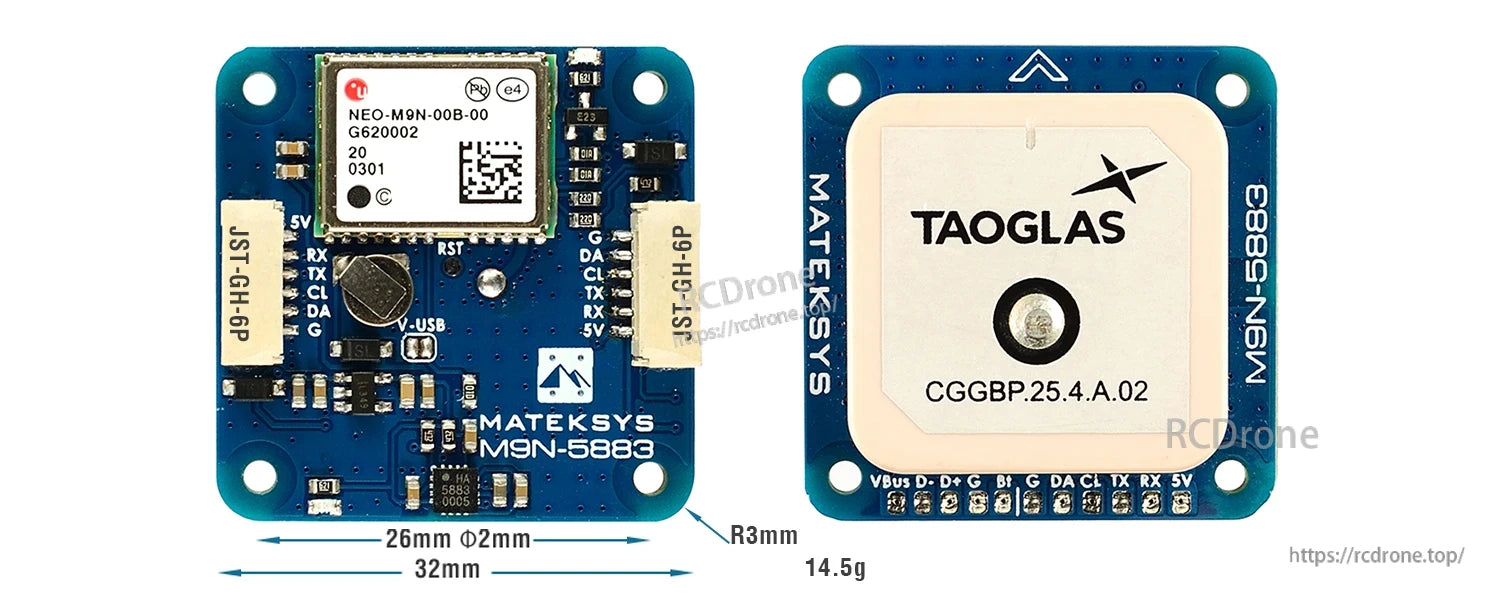
| الأبعاد | 32mm*32mm*10mm |
| الوزن | 14.5g |
| تفاصيل التركيب (كما هو موضح) | 26 مم؛ قطر الثقب: Φ2 مم؛ R3 مم |
ما هو متضمن
- 1x M9N-5883
- 1x JST-GH-6P إلى JST-GH-6P سلك سيليكون بطول 20 سم
التوصيلات والإعدادات
- M9N-5883 5V إلى وحدة التحكم في الطيران 4~5.5V
- M9N-5883 RX إلى وحدة التحكم في الطيران UART_TX
- M9N-5883 TX إلى وحدة التحكم في الطيران UART_RX
- M9N-5883 CL إلى وحدة التحكم في الطيران I2C_SCL
- M9N-5883 DA إلى وحدة التحكم في الطيران I2C_SDA
- M9N-5883 G إلى وحدة التحكم في الطيران GND
نصائح وملاحظات
-
محاذاة البوصلة (تركيب مسطح): يُنصح بشدة بعدم إمالة المغناطيس!
- INAV/Betaflight: سهم البوصلة للأمام، اضبط CW 270° Flip عندما يكون سهم وحدة التحكم في الطيران متجهًا للأمام.
- INAV/Betaflight: سهم البوصلة للخلف، اضبط دوران 90° في اتجاه عقارب الساعة عندما يكون سهم وحدة التحكم في الطيران متجهًا للأمام.
- ArduPilot/Mission Planner: لا يوجد دوران.
- احتفظ بالبوصلة/المغناطيسومتر على بعد 10 سم من خطوط الطاقة/ESC/المحركات/المواد الحديدية.
- يتطلب INAV 5.0.0، Betaflight 4.3.0، ArduPilot 4.3 أو أحدث.
- سلسلة NEO-M9N، MAX-M10S، SAM-M10Q لا تحتوي على ذاكرة فلاش مدمجة؛ بمجرد إيقاف تشغيل GNSS وانتهاء سعة المكثف الفائق، تعود الإعدادات إلى الوضع الافتراضي.
- بروتوكول UBX ثنائي الاتجاه؛ يمكن لبرامج تشغيل وحدة التحكم في الطيران تغيير الإعدادات على GPS عبر بروتوكول UBX (لا حاجة لتعيين معلمات وحدة GNSS في u-center).
- من GNSS FW3.01: نبضة الوقت متزامنة مع توقيت UTC؛ الوقت صالح فقط بعد تنزيل الثانية الكبيسة (قد يستغرق ذلك ما يصل إلى 12.5 دقيقة). قد لا يومض LED PPS على الفور بعد الحصول على إشارة 3D.
- إعادة الضبط: ربط وسادة "RST" بالأرض لمدة 100 مللي ثانية على الأقل يؤدي إلى بدء تشغيل بارد. إعادة الضبط تحذف جميع المعلومات وتؤدي إلى بدء تشغيل بارد؛ استخدمها فقط كخيار استرداد إذا كانت الأسلاك/الإعدادات صحيحة ولكن وحدة التحكم لا تستطيع اكتشاف وحدة GNSS.
- الخدوش على الهوائي الخزفي هي نتيجة لضبط الهوائي.
الكتيبات
- M9N-5883_step.zip
- استكشاف مشكلات GPS ذات الصلة: https://www.mateksys.com/?p=5712#tab-id-6
- u-center Windows
التفاصيل
MATEKSYS GNSS M9N-5883 يجمع بين مستقبل u-blox NEO-M9N وبوصلة QMC5883L مع اتصالات UART و I2C عبر منفذ JST-GH 6-pin.
MATEKSYS M9N-5883 يجمع بين مستقبل GNSS u-blox NEO-M9N وبوصلة 5883 على لوحة بحجم 32 مم مع هوائي TAOGLAS وبوصلات JST-GH 6-pin.
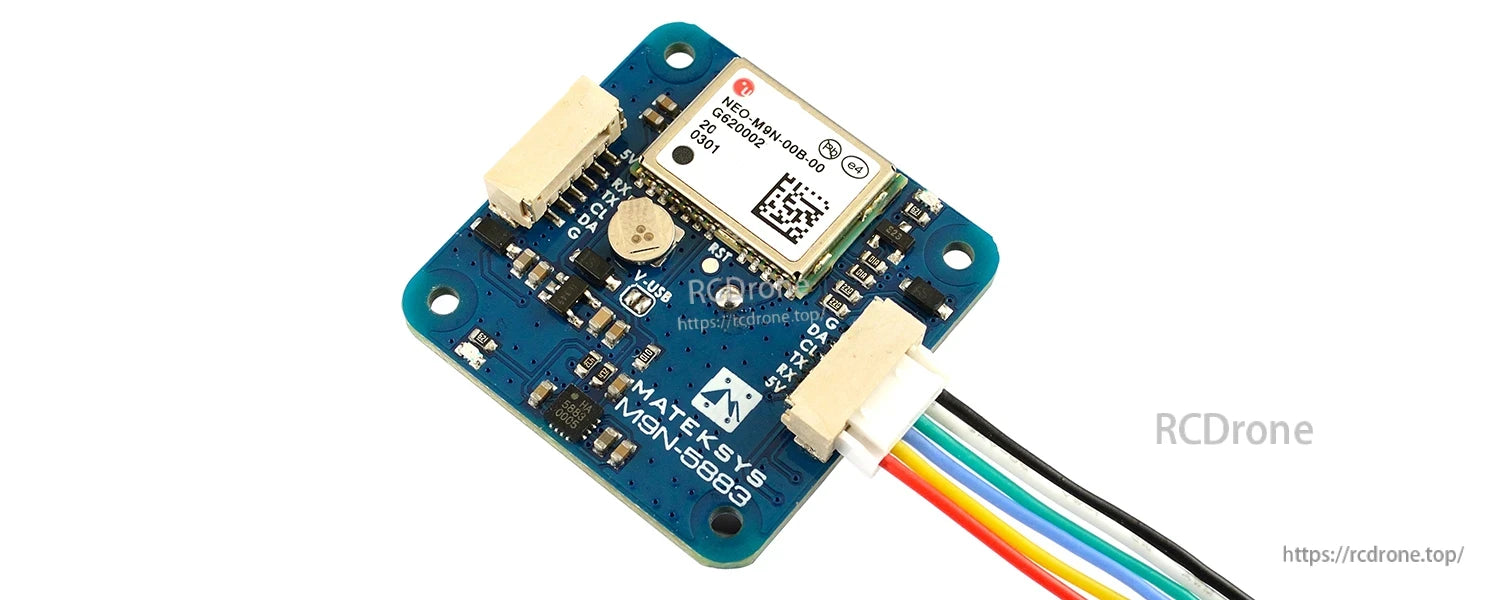
تستخدم وحدة GNSS والبوصلة MATEKSYS M9N-5883 تخطيط لوحة مدمجة مع موصلات JST لتسهيل توصيلات GPS و I2C.
Related Collections