

محرك MUWEIDU L9030 بدون فرشاة DC سيرفو 24V 160 دورة/دقيقة 1 نيوتن.م RS485/CAN مشفر 15/18 بت
محرك MUWEIDU L9030 بدون فرشاة DC سيرفو 24V 160 دورة/دقيقة 1 نيوتن.م RS485/CAN مشفر 15/18 بت
MUWEIDU
سعر عادي
$271.00 USD
سعر عادي
سعر البيع
$271.00 USD
سعر الوحدة
per
Taxes included.
الشحن محسوب عند السداد.
تعذر تحميل توفر الالتقاط
نظرة عامة
الميزات الرئيسية
- تحديد السلسلة: "سلسلة المحركات الكهربائية بدون فرشاة ذات السرعة المنخفضة والدقة العالية" / "محركات السيرفو الصغيرة"
- تصميم عمود مجوف
- تشغيل مستقر & سلس
- معتمد من CE (نص الملصق)
- دقة عالية مدمجة؛ بناء خفيف الوزن؛ أداء عزم دوران عالي (نص الملصق)
- مصمم وفق معايير فائقة الارتفاع (نص الملصق)
- خصائص المحرك لنظام الدفع الكهربائي المدمج (نص الملصق)
- تلبية متطلبات التحكم في الموضع بدقة عالية وسرعة منخفضة (نص الملصق)
- المواد الأساسية (نص الملصق): صفائح فولاذ سيليكون ممتازة ومغناطيسات دائمة عالية الأداء مقاومة لدرجات الحرارة العالية
- تصميم دوار خارجي متعدد المراحل مسطح يوفر عزم دوران أعلى، مثالي للتطبيقات ذات المساحة المحدودة (نص الملصق)
- هيكل بدون فرش مع محامل عالية الأداء لدوران أكثر سلاسة وعمر خدمة أطول (نص التسمية)
- مقاومات سبائك ذات دقة عالية وانحراف حراري منخفض لعينات التيار الدقيقة والتحكم (نص التسمية)
- محرك جسر كامل ثلاثي الطور من نوع N-channel يتميز بمقاومة داخلية منخفضة وإخراج تيار عالي (نص التسمية)
- يدعم التبديل السلس بين أوضاع التحكم في العزم المفتوح، السرعة والموقع (نص التسمية)
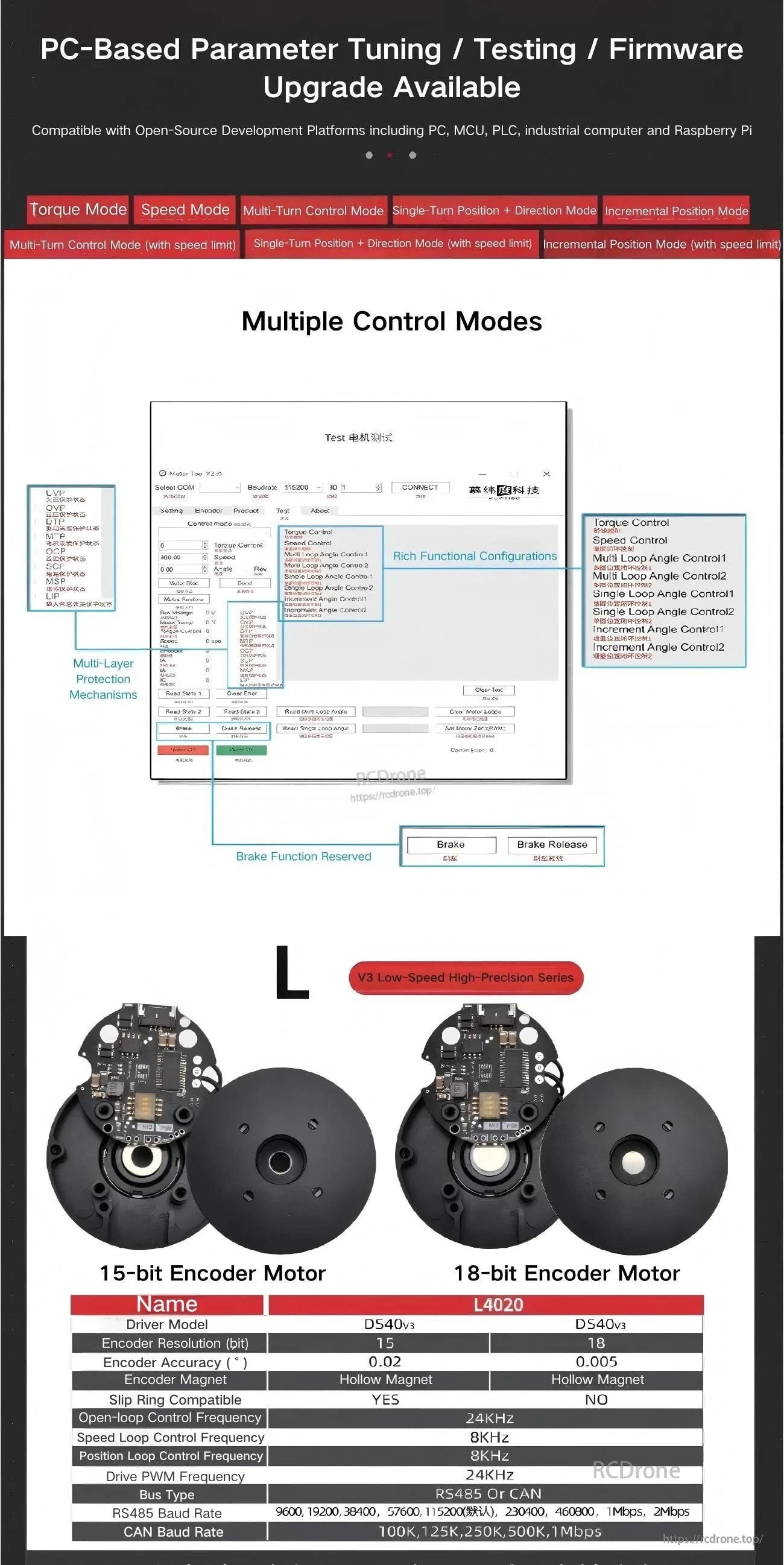
- تتوفر إمكانية ضبط المعلمات / الاختبار / ترقية البرنامج الثابت على نظام PC (نص التسمية)
- متوافق مع منصات التطوير مفتوحة المصدر بما في ذلك PC وMCU وPLC والحاسوب الصناعي وRaspberry Pi (نص التسمية)
سيناريوهات التطبيق
- روبوتات بشرية الشكل
- أذرع روبوتية
- هياكل خارجية
- روبوتات رباعية الأرجل
- مركبات AGV
- روبوتات ARU
المواصفات
| الموديل | L9030 |
| جهد التشغيل | 24V |
| التيار المقنن | 1.85A |
| الطاقة القصوى | 1.8W |
| عزم الدوران المقدر | 1N.m |
| عزم الدوران الأقصى | 2.2N. |
| سرعة مصنفة | 160 دورة في الدقيقة |
| مُشفر | 15 بت أو 18 بت |
| عزم دوران الدوار | 2860 غم.سم^2 |
| مراقبة درجة حرارة المحرك | نعم |
| أنماط التحكم | سرعة/موضع |
| بروتوكول الاتصال | RS485 أو CAN |
| الأبعاد الكلية | Φ89 مم × 37 مم |
| الوزن | 510 غم |
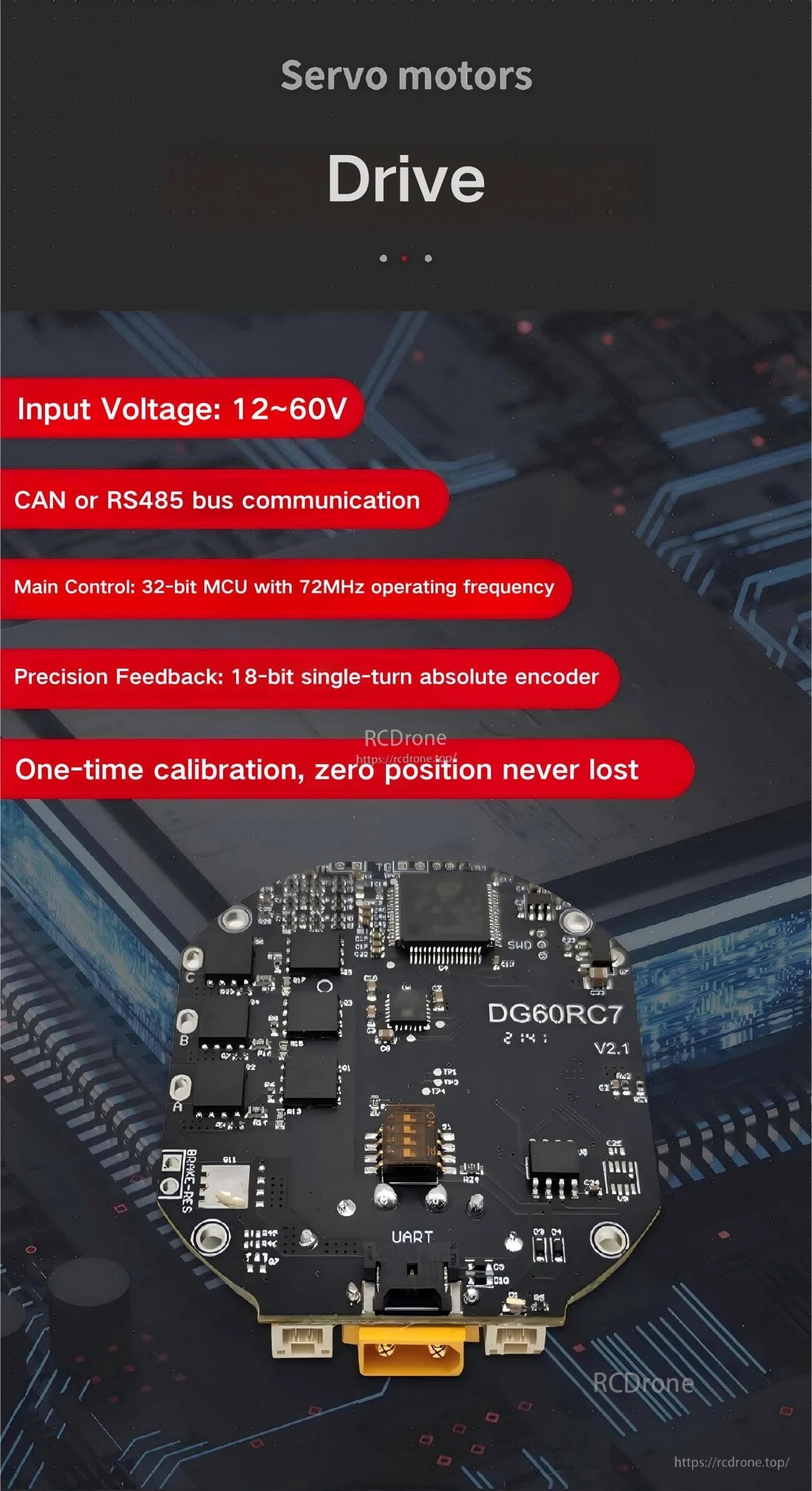
القيادة / التحكم (نص التسمية من الصور)
- جهد الإدخال: 12~60 فولت
- الاتصال عبر حافلة CAN أو RS485
- التحكم الرئيسي: وحدة تحكم دقيقة 32 بت بتردد تشغيل 72 ميجاهرتز
- استجابة دقيقة: مُشفر مطلق بدقة 18 بت لدورة واحدة
- معايرة لمرة واحدة، موضع الصفر لا يضيع أبداً
تعريف الواجهة (نص التسمية من الصور)
| ب/ل | RS485-B أو CAN-L |
| أ/ح | RS485-A أو CAN-H |
| ف- | مزود الطاقة السالب |
| ف- | مزود الطاقة السالب |
| ف+ | مزود الطاقة الموجب |
| ف+ | مزود الطاقة الموجب |
| ت | مرسل UART |
| ر | مستقبل UART |
| ج | إشارة GND |
تسميات واجهات أخرى موضحة: مفتاح التعريف؛ CAN/RS485.
أنماط التحكم (نص التسمية من الصور)
- وضع العزم
- وضع السرعة
- وضع التحكم متعدد الدورات
- وضع الموضع + الاتجاه للدورة الواحدة
- وضع الموضع التزايدي
- وضع التحكم متعدد الدورات (مع حد للسرعة)
- وضع الموضع + الاتجاه للدورة الواحدة (مع حد للسرعة)
- وضع الموضع التزايدي (مع حد للسرعة)
الكتيبات / الوثائق
التفاصيل

تم تصميم سلسلة L9030 للروبوتات المدمجة ووصلات الأتمتة، حيث تركز على التحكم الدقيق في السرعات المنخفضة مع شكل عمود مجوف.

تدعم المواد الأساسية الممتازة، وهيكل الدوار الخارجي، والمحامل السلسة التشغيل المستقر، بينما تغطي أوضاع التحكم المتعددة العزم والسرعة والموضع.
دعم واسع لجهد الإدخال وواجهة CAN/RS485 يساعد في تبسيط التكامل مع الكمبيوتر، أو MCU، أو PLC، أو وحدات التحكم الصناعية.

توضيح دبابيس الموصل وعلامات مفتاح الهوية يجعل توصيل الحافلة وعنوان الجهاز أكثر وضوحًا أثناء التثبيت.
أدوات الكمبيوتر تدعم ضبط المعلمات، والاختبار، وتحديثات البرنامج الثابت، مع خيارات التشفير المتاحة لاحتياجات التمركز المختلفة.

Related Collections

