





محرك مفصل روبوتي MyActuator RH-20 هارمونيك، نسبة تروس 100:1، عزم ذروة 80 نيوتن.متر، يدعم EtherCAT وCAN Bus، مزود بترميز مزدوج 17-بت
محرك مفصل روبوتي MyActuator RH-20 هارمونيك، نسبة تروس 100:1، عزم ذروة 80 نيوتن.متر، يدعم EtherCAT وCAN Bus، مزود بترميز مزدوج 17-بت
MyActuator
تعذر تحميل توفر الالتقاط
نظرة عامة
محرك MyActuator RH-20 للوصلات الروبوتية
مزود بـ بروتوكولات الاتصال EtherCAT وCAN Bus ومشفّرات مطلقة مزدوجة 17 بت، يضمن RH-20 دقة استعادة استثنائية (<0.01°)، مما يجعله مثاليًا للروبوتات الشبيهة بالبشر، وأذرع الروبوت التعاونية، والروبوتات المتنقلة، وغيرها من التطبيقات الدقيقة.
الميزات الرئيسية
-
إنتاج طاقة عالية – عزم دوران مصنف 50N·m، عزم دوران ذروة 80N·m، وطاقة مصنفة 130W للتطبيقات الثقيلة.
-
تحكم دقيق – مشفرات ABS مزدوجة بدقة 17 بت توفر دقة تكرار موضع أقل من 0.01°.
-
اتصالات متقدمة – تدعم EtherCAT و CAN Bus للتحكم السريع والموثوق في الوقت الحقيقي.
-
حماية موثوقة – عزل من الفئة F يضمن تشغيل آمن ومستقر خلال الاستخدام المستمر تحت أحمال عالية.
-
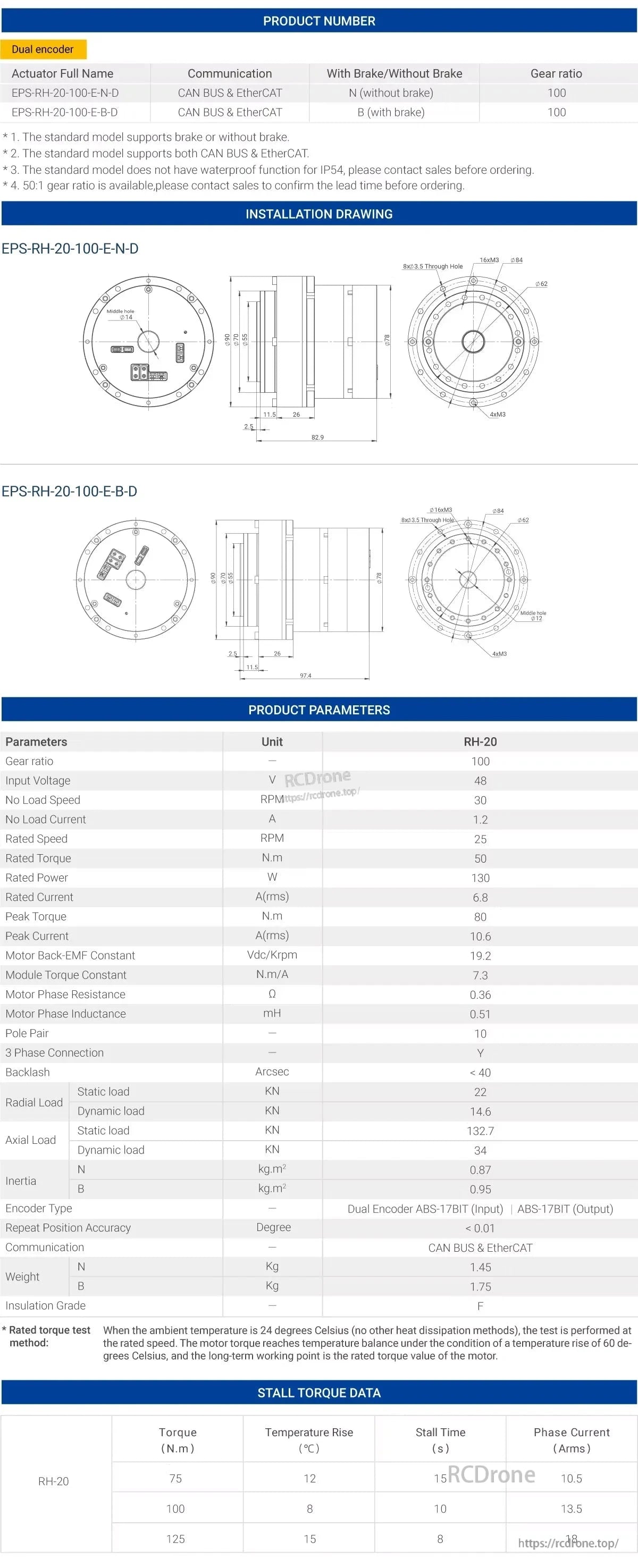
تصميم مدمج – قطر 90 مم، ارتفاع 97.4 مم، ووزن 1.75 كجم فقط لدمج سلس في الأنظمة متعددة المحاور.
-
محامل متينة – محامل أسطوانية متقاطعة لتحمل سعة تحميل شعاعي ومحوري عالية وعمر خدمة طويل.
المواصفات الفنية
أداء المحرك
| المعلمة | الوحدة | القيمة |
|---|---|---|
| نسبة التروس | – | 100 |
| جهد الإدخال | فولت | 48 |
| سرعة عدم التحميل | دورة في الدقيقة | 30 |
| تيار عدم التحميل | أمبير | 1.2 |
| سرعة التصنيف | دورة في الدقيقة | 25 |
| عزم الدوران المصنف | ن·م | 50 |
| الطاقة المصنفة | وات | 130 |
| التيار المصنف | أمبير (جذر متوسط مربع) | 6.8 |
| عزم الدوران الأقصى | ن·م | 80 |
| التيار الأقصى | أمبير (جذر متوسط مربع) | 10.6 |
| ثابت القوة الدافعة الخلفية للمحرك | Vdc/Krpm | 19.2 |
| ثابت عزم الدوران للوحدة | N·m/A | 7.3 |
| مقاومة طور المحرك | Ω | 0.36 |
| محاثة طور المحرك | mH | 0.51 |
| أزواج الأقطاب | – | 10 |
| اتصال ثلاثي الطور | – | Y |
| لعب | Arcsec | <40 |
الحمل والقصور الذاتي
| معامل | وحدة | قيمة |
|---|---|---|
| الحمل الشعاعي (ثابت/ديناميكي) | KN | 22 / 14.6 |
| الحمل المحوري (ثابت/ديناميكي) | KN | 132.7 / 34 |
| القصور الذاتي (N/B) | كجم·م² | 0.87 / 0.95 |
| الوزن (N/B) | كجم | 1.45 / 1.75 |
| نوع المشفر | – | ثنائي ABS-17BIT (مدخل) / ABS-17BIT (مخرج) |
| دقة تكرار الموضع | درجة | <0.01 |
| الاتصال | – | EtherCAT & CAN Bus |
| درجة العزل | – | F |
بيانات عزم التوقف
| عزم الدوران (N·م) | ارتفاع درجة الحرارة (°م) | وقت التوقف (ث) | تيار الطور (A rms) |
|---|---|---|---|
| 75 | 12 | 15 | 10.5 |
| 100 | 8 | 10 | 13.5 |
| 125 | 15 | 8 | 18 |
واجهة وتخطيط الدبابيس
-
EtherCAT_IN / EtherCAT_OUT – منافذ الاتصال عالية السرعة
-
CAN_H / CAN_L – أطراف شبكة CAN Bus
-
VCC / GND – مصدر الطاقة الموجب والسالب
-
RES+ / RES- – واجهة مقاومة التسرب
-
BAT+ / BAT- – اتصال بطارية الذاكرة متعددة الدورات
-
T+, T-, R+, R- – الاتصال بين الرئيس والتابع وتغذية الحالة
محتويات العبوة
-
كابل مصدر الطاقة ×2
-
كابل اتصال CAN Bus ×4
مقاومة تسرب الكابل ×1
-
كابل بطارية متعدد الدوران ×1
-
مقاومة طرفية 120Ω ×1
-
كابل اتصال EtherCAT ×2
-
وحدة اتصال CAN Bus ×1 (محول USB-CAN)
التطبيقات
-
مفاصل الروبوتات البشرية
-
أذرع الروبوت التعاونية
-
الروبوتات المتنقلة وأنظمة قيادة AGV
-
منصات تحديد المواقع الدقيقة
-
معدات الفحص الآلي والمختبرات
التفاصيل
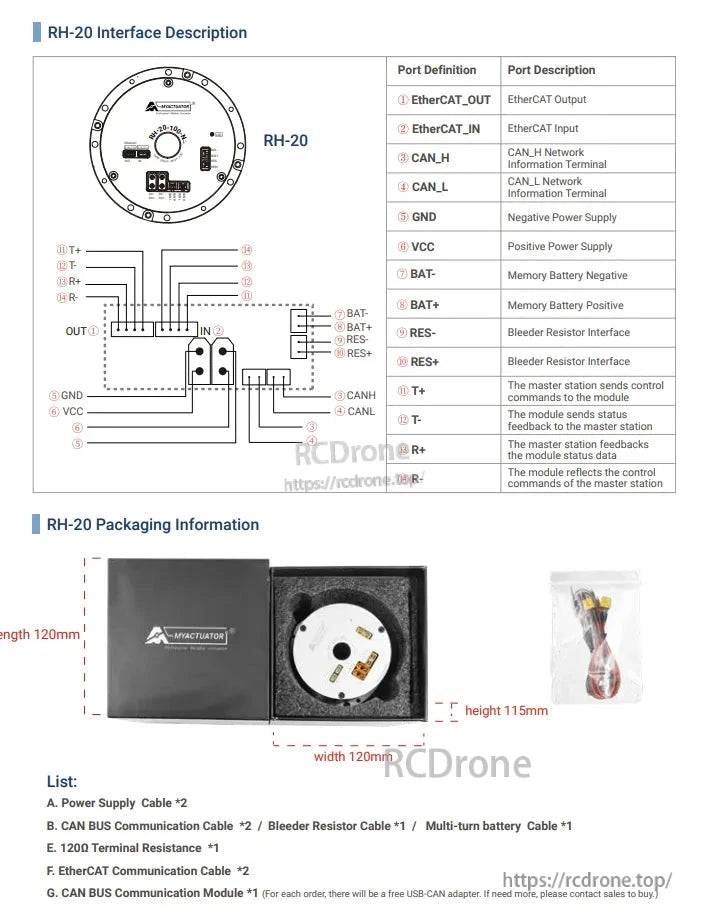
واجهة محرك الهارمونيك تحتوي على اتصالات EtherCAT، CAN bus، الطاقة، والبطارية. التعبئة: 120x120x115mm. يتضمن الكابلات، المقاومات، وحدات الاتصال للإعداد.
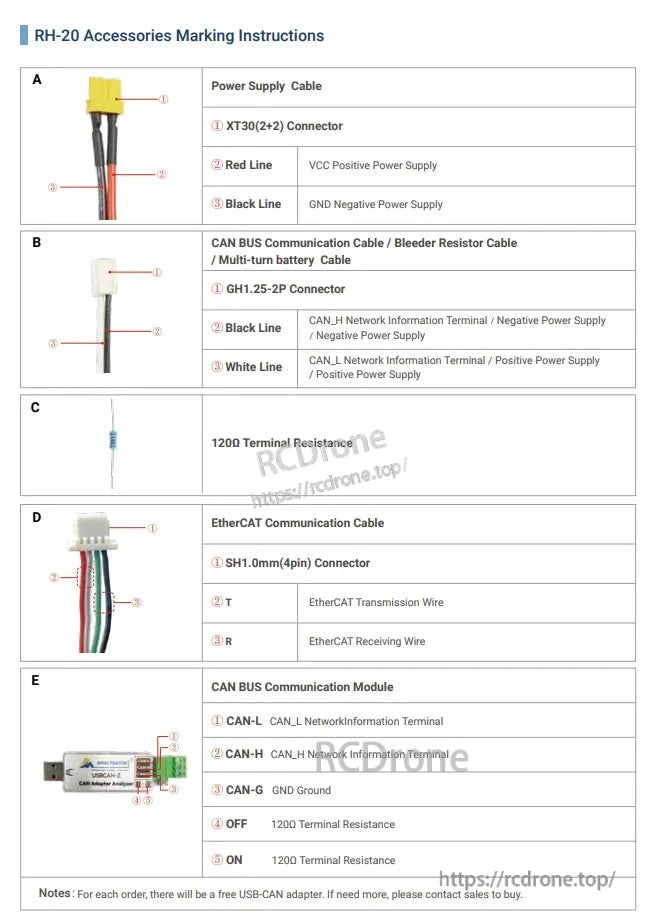
تشمل ملحقات RH-20 تعليمات التعليمات للطاقة، كابلات CAN BUS، كابلات EtherCAT، ووحدة الاتصال. التفاصيل تغطي أنواع الموصلات، ألوان الأسلاك، الوظائف، ومقاومة الطرف. كل طلب يتضمن محول USB-CAN مجاني.
Related Collections





