






وحدة مفصل روبوت مجوف MyActuator RH-32 Harmonic، بجهد 48 فولت، عزم أقصى 229 نيوتن متر، مشفّران بدقة 17 بت، تحكم CAN BUS & EtherCAT
وحدة مفصل روبوت مجوف MyActuator RH-32 Harmonic، بجهد 48 فولت، عزم أقصى 229 نيوتن متر، مشفّران بدقة 17 بت، تحكم CAN BUS & EtherCAT
MyActuator
تعذر تحميل توفر الالتقاط
نظرة عامة
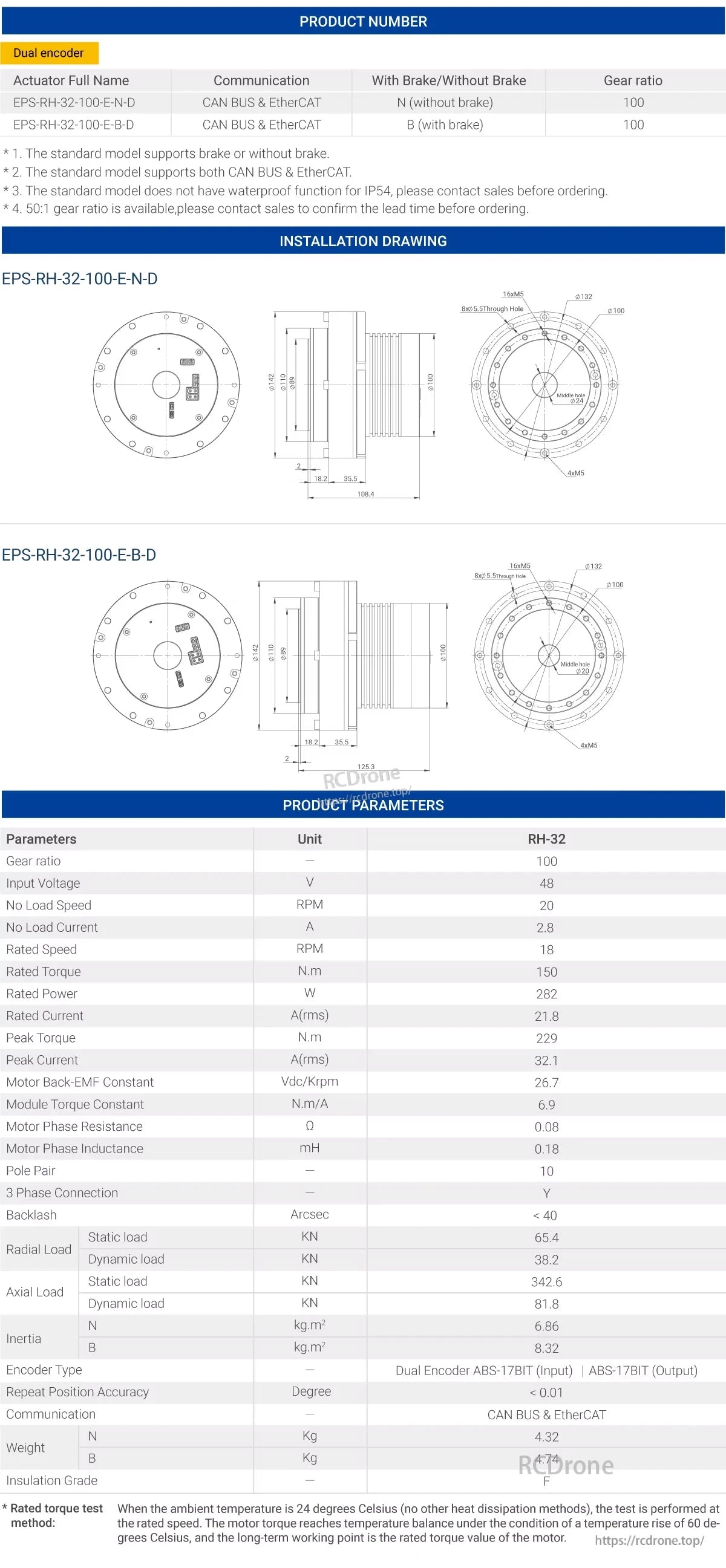
وحدة MyActuator RH-32 Hollow Harmonic Robot Joint Module هي مشغل عالي العزم ودقيق مصمم لأذرع الروبوتات، والروبوتات البشرية، وأنظمة الأتمتة التعاونية. تتميز بنسبة تروس 100:1، وجهد إدخال 48 فولت، وعزم دوران ذروة 229 نيوتن·م، مما يضمن أداءً استثنائيًا للتطبيقات التي تتطلب حركة سلسة، وتحكم دقيق، وسعة تحميل عالية. مع دعم لترميز مزدوج (مدخل/خرج 17 بت)، واتصال CAN BUS &وEtherCAT، وتصميم عمود مجوف، فإنه يتكامل بسلاسة في أنظمة الروبوتات المتقدمة.
الميزات الرئيسية
-
أداء عزم دوران عالي – يوفر حتى عزم دوران مصنف 150 نيوتن·م وعزم دوران ذروة 229 نيوتن·م، مثالي للمفاصل الروبوتية الثقيلة.
-
تحكم دقيق – تضمن مشفرات مزدوجة بدقة 17 بت تغذية راجعة دقيقة وقابلية تكرار <0.01°.
-
اتصال متعدد الاستخدامات – يدعم CAN BUS و EtherCAT لدمج النظام بشكل موثوق ومرن.
-
قدرة تحميل قوية – يتحمل حتى 342.6 kN تحميل ثابت محوري و 81.6 kN تحميل ديناميكي محوري.
-
تصميم مجوف مدمج – يسهل توجيه الكابلات عبر المفصل لتهيئة روبوتية أنظف وأكثر أمانًا.
-
موثوقية عالية – مصنفة F درجة عزل وتصميم متقدم لتبديد الحرارة لضمان المتانة الصناعية.
المواصفات الفنية
| المعلمة | الوحدة | القيمة |
|---|---|---|
| نسبة التروس | — | 100 |
| جهد الإدخال | فولت | 48 |
| سرعة عدم التحميل | دورة في الدقيقة | 20 |
| تيار عدم التحميل | أمبير | 2.8 |
| السرعة المقدرة | دورة في الدقيقة | 18 |
| عزم الدوران المقدّر | ن·م | 150 |
| الطاقة المقدرة | وات | 282 |
| التيار المقدّر | أمبير (جذر متوسط مربع) | 21.8 |
| عزم الدوران الأقصى | ن·م | 229 |
| التيار الأقصى | أ(رسمية) | 32.1 |
| ثابت الجهد الخلفي للمحرك | فولت/كلفن | 26.7 |
| ثابت عزم الوحدة | ن·م/أ | 6.9 |
| مقاومة طور المحرك | أوم | 0.08 |
| محاثة طور المحرك | ملي هنري | 0.18 |
| زوج الأقطاب | — | 10 |
| الاتصال ثلاثي الطور | — | Y |
| العبور | ثانية قوسية | < 40 |
| الحمل الشعاعي (ثابت/ديناميكي) | ك.ن | 65.4 / 38.2 |
| الحمل المحوري (ثابت/ديناميكي) | ك.ن | 342.6 / 81.6 |
| القصور الذاتي (N/B) | كجم·م² | 6.86 / 8.32 |
| نوع المشفر | — | مشفر مزدوج ABS-17BIT (إدخال/إخراج) |
| دقة تكرار الموضع | درجة | < 0.01 |
| الاتصال | — | CAN BUS &و EtherCAT |
| الوزن (N/B) | كجم | 4.32 / 4.74 |
| درجة العزل | — | F |
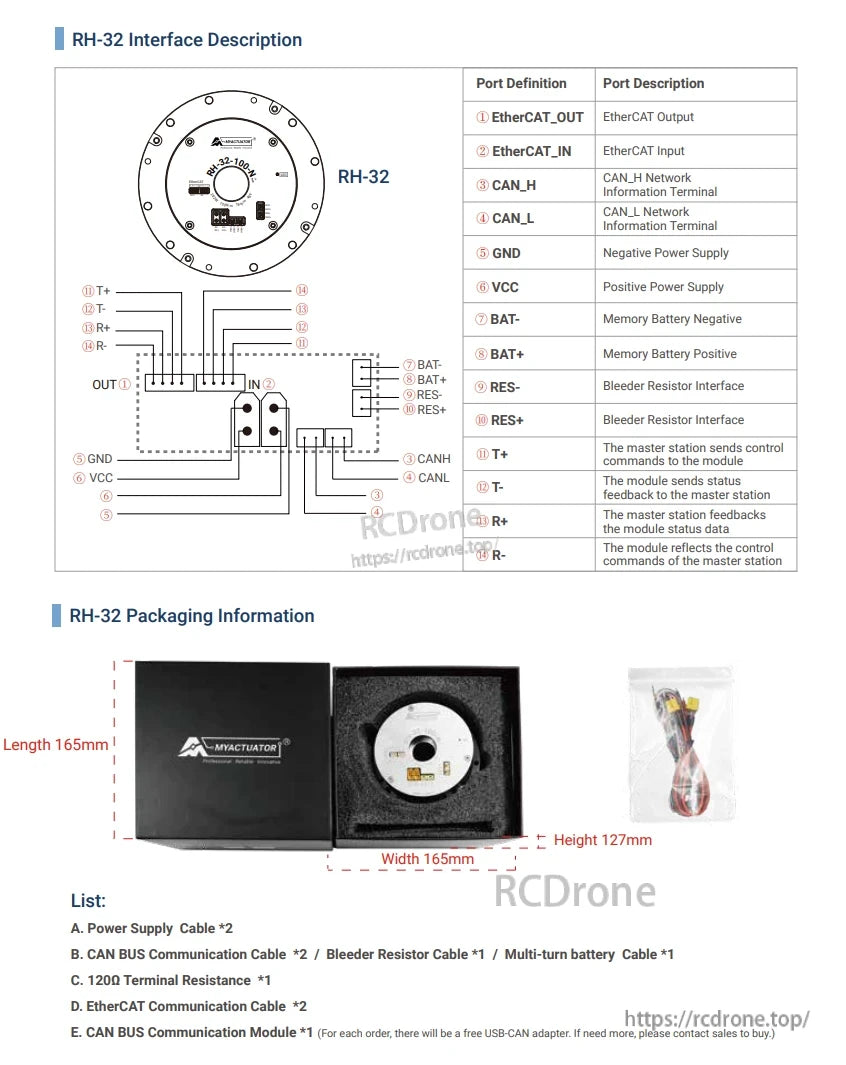
وصف الواجهة
يدعم RH-32 الاتصال عبر EtherCAT و CAN، مما يوفر تحكمًا موثوقًا في الوقت الحقيقي.
-
EtherCAT: اتصال عالي السرعة وحتمي لأتمتة الصناعة.
-
CAN BUS: اتصال مرن ومستقر للأنظمة المعقدة متعددة المفاصل.
-
موصلات مخصصة لإشارات الطاقة والتغذية الراجعة والتحكم تضمن تكاملًا آمنًا وفعالًا.
معلومات التعبئة والتغليف
-
أبعاد العلبة: 165 مم × 165 مم × 127 مم
-
الملحقات المضمنة:
-
كابل إمداد الطاقة × 2
-
كابل اتصال CAN BUS × 2
-
كابل مقاومة تصريف × 1
-
كابل بطارية متعدد الدوران × 1
-
مقاومة طرفية 120Ω × 1
-
كابل اتصال EtherCAT × 2
-
وحدة اتصال CAN BUS × 1 (مع محول USB-CAN مجاني)
- MyActuator وحدة مفصل الروبوت RH-32-100 × 1
-
التطبيقات
-
الروبوتات التعاونية (cobots)
-
الروبوتات البشرية والروبوتات الخدمية
المناورات الصناعية
-
المركبات الموجهة آليًا (AGVs)
-
أنظمة تحديد المواقع الدقيقة
التفاصيل
يقدم مفصل الروبوت RH-32 مشفر مزدوج، CAN BUS/EtherCAT، نسبة تروس 100:1، 48V، 150 N.m عزم، 21.8 تيار. فرامل اختيارية، IP54 متاحة.
يتميز مفصل الروبوت RH-32 بواجهات EtherCAT و CAN، تعريفات المنافذ، الأبعاد 165x165x127 مم. يتضمن الكابلات، مقاومة الطرف، وحدة CAN.
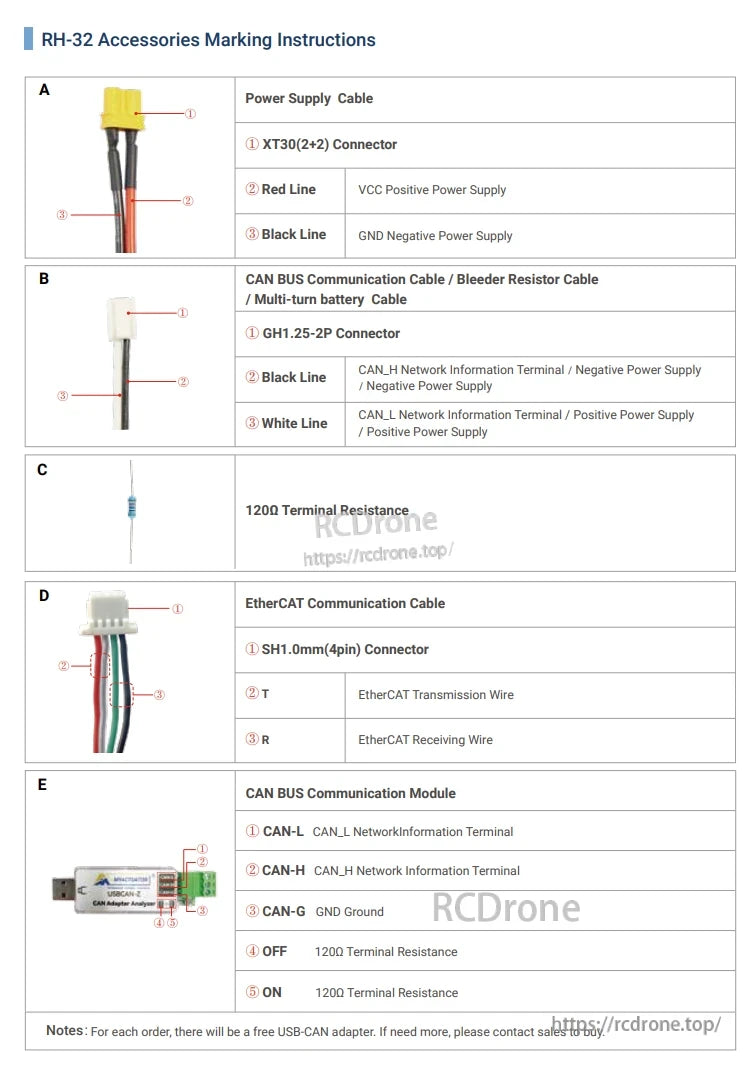
تشمل ملحقات RH-32 كابلات الطاقة، كابلات CAN BUS، كابلات EtherCAT، مقاومة 120Ω، ووحدة CAN. تشمل التفاصيل الموصلات، وظائف الأسلاك، ومقاومات الأطراف لضمان التركيب والتواصل الصحيح. يتم تضمين محول USB-CAN مجاني مع كل طلب.
Related Collections






