






مشغل كوكبي MyActuator RMD-X4-10 بقوة 10 نيوتن·م مع مشفر مزدوج، يدعم EtherCAT+CAN، وحدة قيادة مفصل روبوت
مشغل كوكبي MyActuator RMD-X4-10 بقوة 10 نيوتن·م مع مشفر مزدوج، يدعم EtherCAT+CAN، وحدة قيادة مفصل روبوت
MyActuator
تعذر تحميل توفر الالتقاط
نظرة عامة
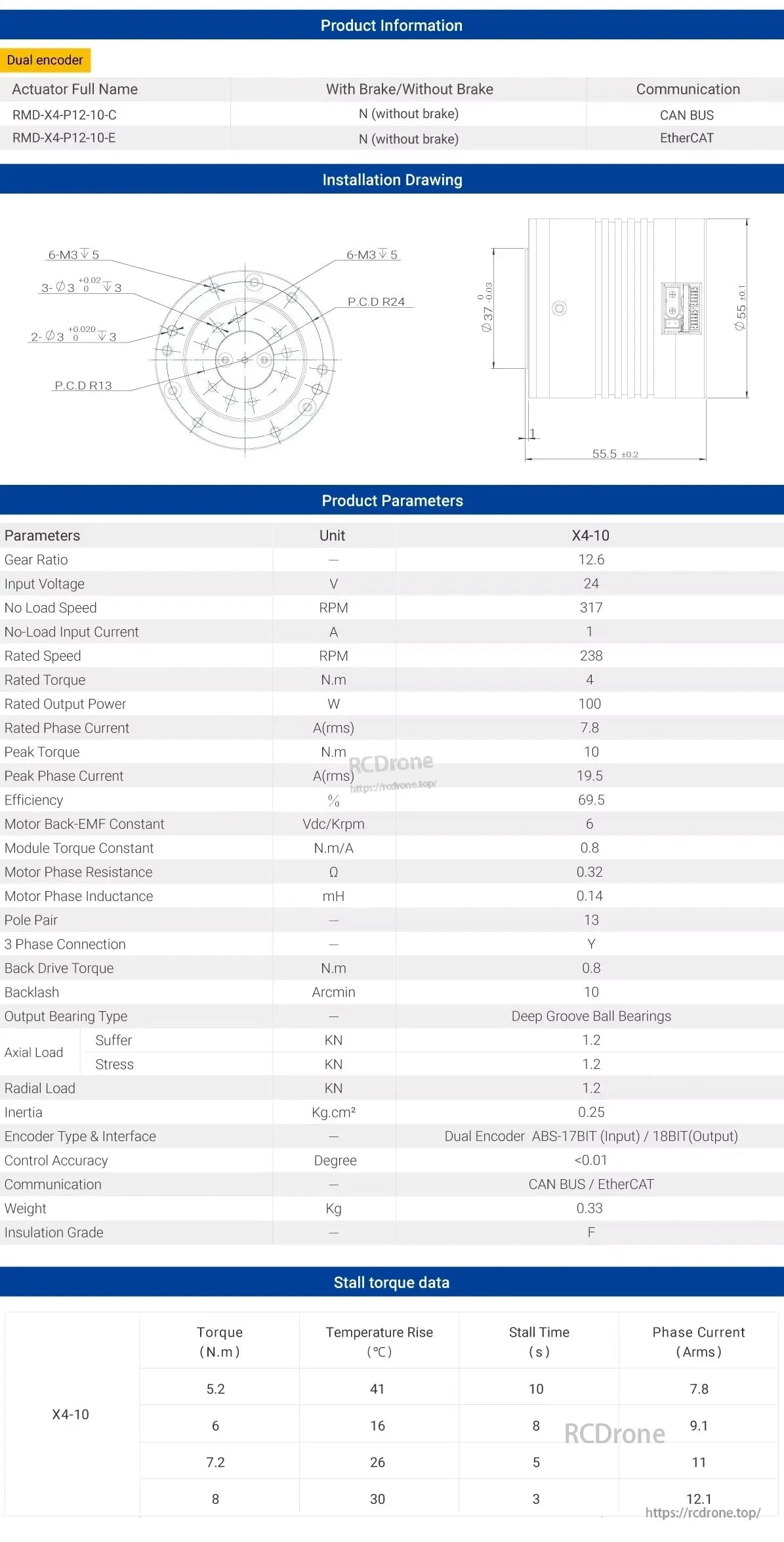
يعتبر MyActuator RMD-X4-10 محرك كوكبي عالي الأداء مصمم لتطبيقات الروبوتات المتقدمة. يتميز بنسبة تروس كوكبية 12.6:1، وعزم دوران ذروة يبلغ 10N·m، وقوة خرج مصنفة تبلغ 100W، ويجمع بين نظام ترميز مزدوج (مدخل 17 بت / مخرج 18 بت) الذي يوفر تحكمًا بدقة 0.01°. هيكله الكبير المجوف يدعم تكامل متعدد المستشعرات، مما يمكّن من إنشاء محور مركزي للتحكم في وضع الجسم بالكامل في الروبوتات الشبيهة بالبشر. مع اتصال ثنائي البروتوكول EtherCAT و CAN، يحقق المحرك استجابة فائقة السرعة تبلغ 250μs، مما يجعله مثاليًا للسيناريوهات عالية الديناميكية وعالية الموثوقية مثل الروبوتات الشبيهة بالبشر، ومحركات الساق البيونية، والأتمتة الصناعية.
الميزات الرئيسية
-
ترميز مزدوج عالي الدقة: مدخل 17 بت / مخرج 18 بت مع 0.01° دقة
-
عزم الدوران الأقصى 10N·م مع نسبة تروس كوكبية 12.6:1
-
محمل أسطواني متقاطع: قدرة استثنائية على مقاومة لحظات الانحناء لتمكين مفاصل روبوتية مستقرة
-
اتصال مزدوج عبر EtherCAT + CAN Bus: يدعم ربط عدة آلات، استجابة فائقة السرعة 250μs
-
هيكل مجوف كبير: يمكّن من دمج المستشعرات، والكابلات، والحلقات المنزلقة للأنظمة الروبوتية المعقدة
-
موثوقية عالية: مصمم للتحكم في مشية الإنسان، انتقالات سلسة للجري، والقفز، والحركات المعقدة
-
مضغوط وخفيف الوزن: Φ55mm × 55.5mm، الوزن 0.33kg
المواصفات
| المعلمة | القيمة |
|---|---|
| الموديل | RMD-X4-10 |
| نسبة التروس | 12.6:1 |
| جهد الإدخال | 24V DC |
| السرعة المقدرة | 238 RPM |
| سرعة عدم التحميل | 317 RPM |
| القدرة الناتجة المقدرة | 100W |
| عزم الدوران المقدّر | 4N·م |
| عزم الدوران الأقصى | 10N·م |
| التيار المقدّر | 7.84A |
| تيار عدم التحميل | 1A |
| نوع المشفر | مشفر مزدوج (ABS-17bit / 18bit) |
| الاتصال | EtherCAT + CAN Bus |
| الوزن | 0.33kg |
| الحجم | Ø55mm × 55.5مم |
التطبيقات
-
الروبوتات البشرية – محركات مفصلية للأذرع والساقين والجذع
-
محركات الساق البيونية – عزم دوران عالي مع تصميم مضاد للانحناء لأساليب الجري والقفز
-
الروبوتات التعاونية – تحكم سلس في الحركة لأتمتة الصناعة
-
الهياكل الخارجية – مشغلات خفيفة الوزن وعالية الديناميكية للأجهزة المساعدة للإنسان
-
خطوط الإنتاج المرنة – تزامن متعدد المحاور من خلال اتصال EtherCAT عالي السرعة
التغليف والإكسسوارات
-
مزود الطاقة + كابل اتصال CAN Bus ×1
-
مقاومة طرفية 120Ω ×1
كابل اتصال EtherCAT ×2
-
وحدة اتصال CAN Bus ×1 (محول USB-CAN مشمول مع كل طلب)
أبعاد التعبئة: 100 مم × 100 مم × 70 مم
التفاصيل

RMD-X4-PT2.5-10-C محرك مفصل روبوتي مزود بترميز مزدوج مع مدخل 24 فولت، نسبة تروس 12.6، عزم دوران 4 نيوتن·م، وخرج 100 واط. يتميز بواجهة CAN BUS/EtherCAT، سرعة خالية من الحمل 317 دورة في الدقيقة، ووزن 0.28 كجم. يتضمن أبعاد التركيب والمواصفات الفنية.

محرك كوكبي بعزم ذروة 10 نيوتن·م، نسبة تروس 12.6:1، وزن 0.33 كجم. الحجم: Ø55mm×55.5mm. يتميز بتواصل EtherCAT/CANBUS، ترميز مزدوج، وحدة تحكم دقيقة عالية السرعة، شرائح CAN، ومحامل كروية عميقة.

مدخل ترميز مزدوج ABS-17BIT / خرج 18BIT، X4-10، SN:40225621، MYACTUATOR

محرك MYACTUATOR RMD-X4-10 الكوكبي يقدم طاقة 100 واط، عزم 46 نيوتن·م، ترميز مزدوج، سرعة 238 دورة في الدقيقة. يأتي مع كابل طاقة + كابل CAN BUS، مقاومة 120Ω، كابل EtherCAT، وحدة CAN BUS، ومحول USB-CAN مجاني.
محرك RMD-X4-10 الكوكبي الروبوتي مزود بترميز مزدوج، 12.نسبة التروس 6، مدخل 24 فولت، مخرج 100 واط، وCAN BUS/EtherCAT. يوفر عزم دوران 4N.m، سرعة 238 RPM، وزنه 0.33 كجم، ويستخدم محامل كروية عميقة لتحقيق كفاءة عالية.

واجهة X4-10 تشمل منافذ الطاقة وCAN وEtherCAT. تحتوي العبوة على مزود الطاقة، والكابلات، والمقاومات، والوحدة. الأبعاد: 100x100x70 مم. تتضمن محول USB-CAN مع كل طلب.

تشمل ملحقات X4-10 مزود الطاقة، وكابلات CAN BUS وEtherCAT، ومقاومة طرفية، ووحدة CAN BUS. تغطي التفاصيل الموصلات، ووظائف الأسلاك، وخطوط الإشارة، وملاحظات محول USB-CAN.
Related Collections






