






مشغل سيرفو كوكبي MyActuator RMD-X6-7، بجهد 48 فولت، سرعة 400 دورة/دقيقة، عزم 3.5 نيوتن.متر، CAN/RS485، عالي الدقة للروبوتات والأتمتة
مشغل سيرفو كوكبي MyActuator RMD-X6-7، بجهد 48 فولت، سرعة 400 دورة/دقيقة، عزم 3.5 نيوتن.متر، CAN/RS485، عالي الدقة للروبوتات والأتمتة
MyActuator
تعذر تحميل توفر الالتقاط
نظرة عامة
محرك MyActuator RMD-X6-7 سيرفو كوكبي هو حل دفع مدمج وخفيف الوزن مصنوع من الألمنيوم الطائر عالي الجودة. مصمم للروبوتات عالية الدقة وأنظمة الأتمتة، يوفر عزم دوران مصنف قدره 3.5N·m، عزم دوران ذروة قدره 7N·m، سرعة مصنفة قدرها 400RPM، و طاقة مصنفة قدرها 150W تحت مدخل 48V. يضمن نظام التروس الكوكبي المدمج أداءً مستقرًا عالي السرعة، بينما توفر الاتصال عبر CAN و RS485 تكاملًا مرنًا للنظام.
الميزات الرئيسية
-
كفاءة عالية – تصل إلى 70% كفاءة مع تروس كوكبية دقيقة لضمان نقل مستقر وسلس.
-
بناء قوي – هيكل من الألمنيوم من الدرجة الجوية، خفيف الوزن ولكنه متين لأداء عالي في الروبوتات.
-
حماية شاملة – حماية من ارتفاع درجة الحرارة، وارتفاع التيار، وارتفاع الجهد، والسرعة الزائدة مدمجة.
-
مرونة الاتصال – يدعم CAN (1M) و RS485 (115200/500K/1M/2.5M) بروتوكولات للتكامل الموثوق.
-
مشفّر متعدد الدورات – مشفّر بدقة 18 بت مع الاحتفاظ ببيانات زاوية انقطاع الطاقة لتتبع دقيق للموقع.
-
خيارات قابلة للتخصيص – يدعم مقاومة الماء IP54 وتخصيص الفرامل للبيئات الصعبة.
-
تحديثات البرنامج الثابت عن بُعد – سهل التحديث والتكوين مع تعليمات مخصصة.
المواصفات
| المعلمة | القيمة |
|---|---|
| نسبة التروس | 6:1 |
| جهد الإدخال | 48 فولت |
| السرعة المقدرة | 400 دورة في الدقيقة |
| عزم الدوران المقدّر | 3.5 نيوتن·متر |
| عزم الدوران الأقصى | 7 نيوتن·متر |
| الطاقة المقدرة | 150 واط |
| التيار المقدّر | 4 أمبير |
| التيار الأقصى | 9 أمبير |
| الكفاءة | 70% |
| أزواج الأقطاب | 14 |
| عزم الدوران المضاد | 0.08 N·م |
| الرجوع | 10 دقيقة قوسية |
| حمولة محورية | 775 ن |
| حمولة شعاعية | 1250 ن |
| عطالة | 4.8 كغ·سم² |
| دقة المشفر | 18-بت |
| الاتصال | CAN/RS485 |
| الوزن | 0.35 كجم |
التطبيقات
يعتبر مشغل RMD-X6-7 مثاليًا لتطبيقات الروبوتات المتقدمة والأتمتة، بما في ذلك:
-
الروبوتات البشرية – تحكم سلس ودقيق في المفاصل
-
الأذرع الميكانيكية – عزم دوران عالي وتحديد دقيق للموقع
-
الهياكل الخارجية – تشغيل خفيف الوزن وموثوق
-
الروبوتات رباعية الأرجل – استجابة سريعة وثبات للحركات الديناميكية
-
الشاحنات الذكية AGV – أنظمة قيادة فعالة مع اتصالات في الوقت الحقيقي
-
روبوتات SCARA وAru – دقة عالية للأتمتة الصناعية
المزايا
تصميم مقاوم للماء وقابل للتحمل – تخصيص اختياري بمعيار IP54 لمقاومة الغبار والماء والتآكل.
-
اتصال مستقر – هيكل الوسادة المعزز يضمن واجهات موثوقة على مدى الاستخدام الطويل.
-
مراقبة درجة الحرارة – مستشعر درجة الحرارة المدمج يعزز السلامة التشغيلية.
-
مضغوط وخفيف الوزن – فقط 0.35 كجم، مما يقلل من الوزن الكلي للنظام دون المساس بالقوة.
تفاصيل

محرك سيرفو MYACTUATOR X6-7 يقدم كثافة عزم دوران عالية وحماية من التيار الزائد. المواصفات: نسبة 6:1، 400 دورة في الدقيقة، 3.5 N.m، 350 جرام، 150 واط، متوافق مع RoHS.

محرك سيرفو مع مخفض كوكبي، استجابة عالية، وعزم دوران كبير. مثالي للروبوتات والأذرع. المواصفات: 150 واط، 3.5N.m، 400 دورة في الدقيقة.

محرك سيرفو MYACTUATOR X6-7، 150 واط، 3.5 نيوتن.م، 400 دورة في الدقيقة، 1.6:1.يتضمن المحرك، كابلات CAN، أسلاك الطاقة، مقاوم إنهاء، أكمام، موصلات CAN، وموصلات الطاقة.
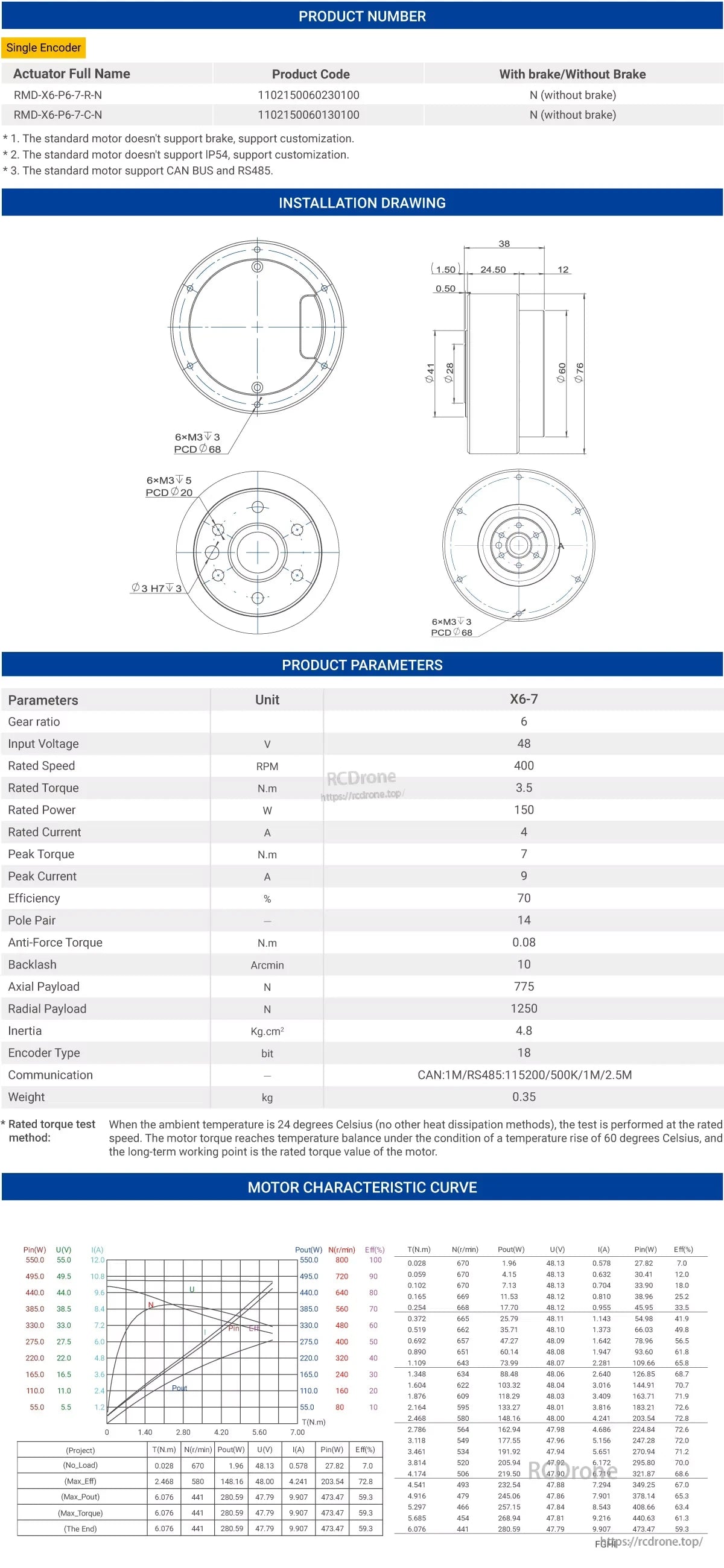
يقدم مشغل السيرفو MRC-X6-7 نسبة تروس 6:1، مدخل 48 فولت، 400 دورة في الدقيقة، عزم دوران 3.5 نيوتن.م، اتصال CAN/RS485، دعم IP54، تخصيص الفرامل، ويتضمن رسومات التركيب ومنحنيات الأداء.
Related Collections






