مواصفات وحدة التحكم في الطيران Pixhawk 2.4.8 PX4 PIX 32 بت
الاستخدام: المركبات وألعاب التحكم عن بعد
ترقية الأجزاء/الملحقات: الإطار
مستلزمات الأدوات: مطحون
المعلمات الفنية: القيمة 3
الأجهزة الطرفية/أجهزة التحكم عن بعد: جهاز التحكم عن بعد
العمر الموصى به: 12+y,14+y
أجزاء وملحقات التحكم عن بعد: وحدات التحكم في السرعة
الأصل: البر الرئيسي للصين
رقم الموديل: بيكشوك 2.4.8
المواد: معدن
سمات الدفع الرباعي: المحركات
لنوع المركبة: الطائرات
اسم العلامة التجارية: ريديتوسكي
ReadyToSky هو مزود محترف لملحقات وحدة FPV RC. إذا كنت مهتمًا بمعرفة المزيد حول خيارات الشراء بالجملة أو بالجملة، فلا تتردد في التواصل معنا.
الميزات:
يدعم Pixhawk 2.4.8 أحدث البرامج الثابتة الرسمية لـ ardupilot والبرامج الثابتة PX4.
1. يمكن لمعالجات ARM CortexM4 المتقدمة ذات الأداء العالي 32 بت (فلاش 2 ميجابايت)، تشغيل نظام التشغيل NuttX RTOS في الوقت الفعلي؛
2. 14 بوم/إخراج المؤازرة؛
3. واجهة الناقل (UART، I2C، SPI، CAN)؛
4. فشلت وحدة التحكم الاحتياطية والطاقة الاحتياطية المتكاملة، وفشلت وحدة التحكم الأساسية في جعل التحكم الاحتياطي آمنًا؛
5. توفير الوضعين التلقائي واليدوي؛
6. توفير مدخلات طاقة زائدة وتجاوز الفشل؛
7. أضواء LED متعددة الألوان؛
8. توفير واجهة صفارة متعددة النغمات
9. تسجيل بيانات الطيران ببطاقة Micro SD؛
المواصفات:
الواجهة
1.5 متوافق مع الجهد العالي UART 1, 2 مع التحكم في تدفق الأجهزة
2. 2 يمكن
3.Spektrum DSM / DSM2 / DSM-X إدخال متوافق مع جهاز استقبال الأقمار الصناعية
4.المدخلات والمخرجات المتوافقة مع Futaba SBUS
5.PPM إدخال الإشارة
6.RSSI (PWM أو الجهد) الإدخال
7.I2C
8.SPI
9.3.3 و6.6 مدخل VADC
10. واجهة USB ميكرو خارجية
شاشة Pixhawk OSD OLED لـ Pixhawk 2.4.8 PIX PX4 التحكم في الطيران عرض الطيران حالة الطيران متصلة بواجهة I2C
إنها مناسبة للتحكم في طيران Pixhawk وما إلى ذلك، وتستخدم لعرض معلومات حالة الطائرة. هذه الوحدة متصلة بواجهة I2C الخاصة بـ Pixhawk
ملاحظة: لترقية البرنامج الثابت للشاشة إلى 3.5 أو أكثر، اضبط NTF_DISPLAY_TYPE على 1 في Massion Planner وأعد تشغيل Pixhawk.
كيفية استخدام وحدة WIFI لـ PIXHAWK؟
1.كيفية الاتصال؟
استخدم خط 6P يتصل بوحدة التحكم في الطيران pixhawk.
بسبب اختلاف البرامج الثابتة، يمكن استخدام بعض البرامج الثابتة، ومنفذين، ويمكن لبعض البرامج الثابتة استخدام أحد المنافذ فقط. لذلك ابحث عن أحد المنافذ المتاحة للاتصال.
إذا كنت تستخدم البرنامج الثابت PX4، فيمكن استخدام TELEM1 فقط، ولا يمكن استخدام TELEM2.
بالنسبة للبرامج الثابتة لـ Ardupilot، يوصى باستخدام منفذ TELEM2. أو ابحث عن أحد المنافذ المتاحة للاتصال.
بالنسبة للبرامج الثابتة PX4، يجب استخدام منفذ TELEM1.
2.كيفية الاستخدام؟
يرجى ملاحظة: عند استخدام اتصال القياس عن بعد لراديو Wifi، يجب استخدام وحدة طاقة 3DR أو 5V ESC لتوفير الطاقة للتحكم في الطيران. لا يمكن إدخال USB لأن أولوية USB أعلى من قياس الراديو عن بعد. إذا تم توصيل كبل USB، فلا يمكن استخدامه لنقل القياس عن بعد عبر الراديو.
اسم نقطة اتصال wifi هو Drone، لذا استخدم الهاتف أو الكمبيوتر للاتصال بنقطة الاتصال هذه، وكلمة المرور هي 12345678.
ملاحظة: بعض الأجهزة (على سبيل المثال بعض أجهزة iPhone IOS) لا يمكنها الحصول على IP تلقائيًا، يجب عليك الضبط يدويًا.
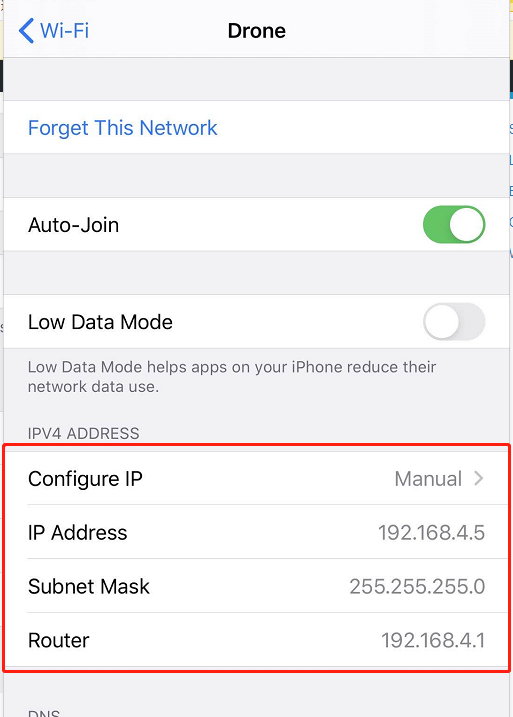
قم بتعيين تكوين IP كدليل. قم بتعيين عنوان IP على أنه "192.168.4.5" أو غيره، ولكن لا يمكن تعيينه على أنه "192.168.4.1"، لا يمكن أن يتجاوز الرقم الأخير 254. قم بتعيين قناع الشبكة الفرعية على أنه "255.255.255.0" (يجب تعيين هذه القيمة، ولا يمكن تعيين أي شيء آخر). قم بتعيين جهاز التوجيه كـ "192.168.4.1" (يجب تعيين هذه القيمة، ولا يمكن تعيين أي شيء آخر)
عندما يتصل جهازك بنقطة الاتصال هذه بنجاح، يمكنك استخدام المتصفح للزيارة http://192.168.4.1 ، ويمكنك تعديل المعلمة.
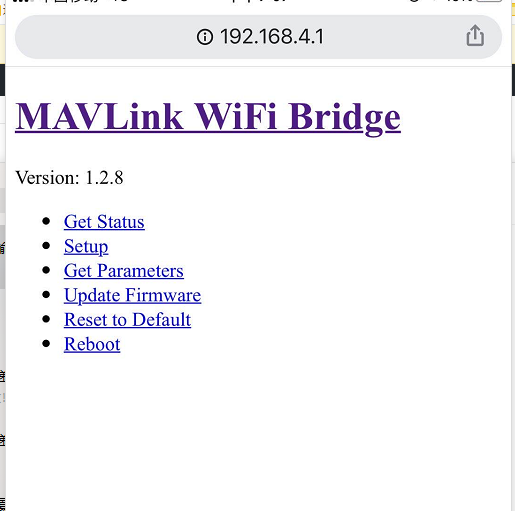
ملاحظة، الزر هو زر إعادة الضبط، وليس زر إعادة التشغيل، عند الضغط على الزر، سيتم ضبط جميع المعلمات على الوضع الافتراضي إذا قمت بتعديل بعض المعلمات.
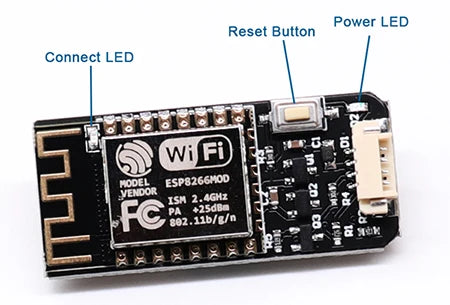
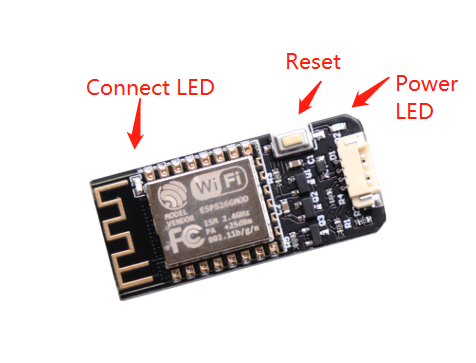
مؤشر الطاقة LED: عند تشغيل الطاقة، يضيء مؤشر LED الأحمر.
توصيل LED: عند الاتصال بجهاز التحكم الأرضي (على سبيل المثال، Mission Planner أو Qgroundcontrol) بنجاح، يومض مؤشر LED الأزرق. عند قطع الاتصال بجهاز التحكم الأرضي، يضيء مؤشر LED الأزرق.
1.كيفية الاستخدام لمخطط المهمة؟
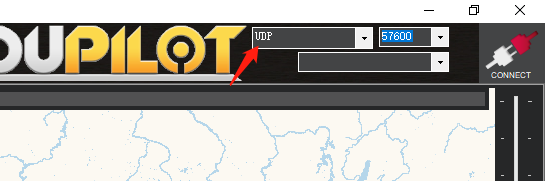
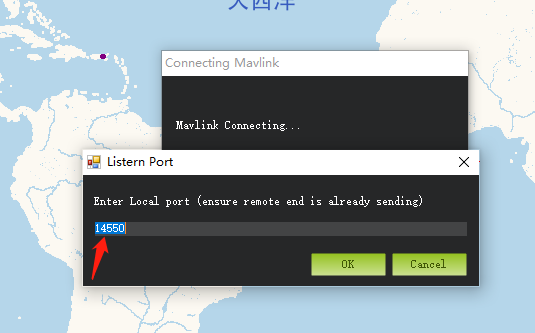
أولاً، قم بتوصيل جهاز الكمبيوتر الخاص بك بنقطة الاتصال Drone بنجاح. حدد UDP. ثم انقر فوق الزر "اتصال"، واستخدم منفذ 14550. انقر فوق "موافق". ليست هناك حاجة لاختيار معدل الباود. معدل الباود الافتراضي لوحدة wifi هو 57600. ولكن يمكن أن يعمل 115200 أو غيره أيضًا.
2.كيفية الاستخدام للهاتف
لأجهزة Android: قم بتنزيل qgroundcontrol (فقط لـ pixhawk، وليس لـ APM)
من هنا،http://qgroundcontrol.com/downloads/
قم بتحميل DroidPlanner من هنا،https://github.com/DroidPlanner/Tower/releases
بالنسبة لأجهزة iPhone (IOS): ابحث في qgroundcontrol في متجر التطبيقات.
يمكن لـ
qgroundcontrol (فقط لـ pixhawk، وليس لـ APM) الاتصال تلقائيًا، ويجب على DroidPlanner اختيار منفذ "UDP" و"14550" قبل الاتصال بوحدة التحكم الأرضية.
يستخدم WIFI V3.0 وحدة المعالجة المركزية 32 بت، ويدعم TCP وUDP
موقع ويب WIFI V3.0 DroneBridge
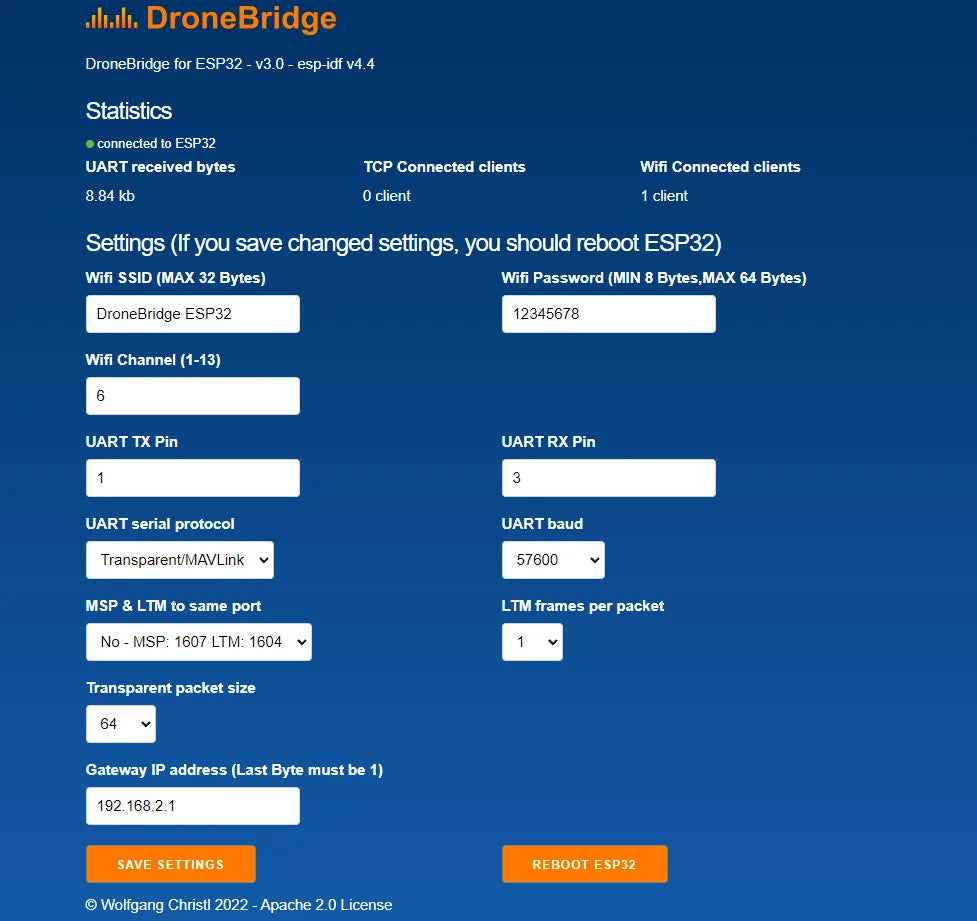
أولول; DroneBridge لـ ESP32 v3.0 esp idf v4.4 إحصائيات متصلة بـ ESP 32 UART وحدات بايت مستلمة TCP عملاء متصلين كلمة مرور Wifi (حد أدنى 8 بايت، حد أقصى 64 بايت) إذا قمت بحفظ الإعدادات التي تم تغييرها، فيجب عليك إعادة تشغيل ESP33 .
(أرسله حسب اختيارك)

بيكشوك 2.4.8 FC + 4G TF بطاقة + MBN GPS حامل GPS + OSD + وحدة الطاقة ممتص الصدمات I2C PPM RGB زر الأمان الجرس واي فاي أسلاك القياس عن بعد Ontk 'GPs Module PPM 1'

تتضمن الحزمة: Pixhawk 2.4.8 وحدة تحكم الطيران، وبطاقة 4G TF، وممتص الصدمات، ووحدة I2C، ووحدة PPM، ووحدة RGB، وشاشة OLED، وزر أمان مع صفارة، وأسلاك لجميع المكونات.
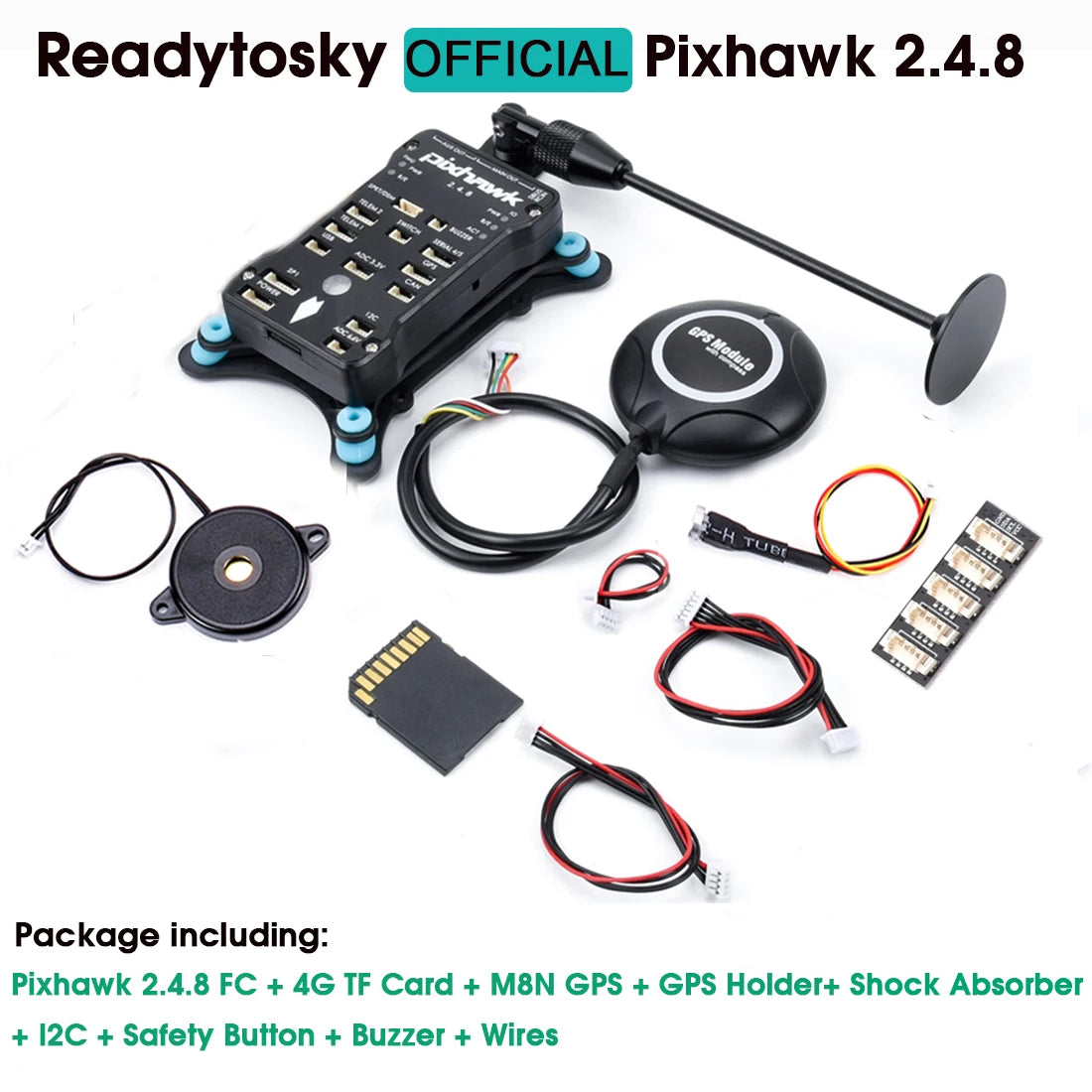
تتضمن الحزمة: Pixhawk 2.4. 8 وحدة تحكم في الطيران، وبطاقة 4G TF، ووحدة MBN GPS، وحامل GPS، وممتص الصدمات، وزر أمان I2C، وأسلاك الجرس، ووحدة قياس عن بعد اختيارية لنقل البيانات لاسلكيًا.

تتضمن الحزمة: Pixhawk 2.4.8 جهاز التحكم في الطيران، وبطاقة 4G TF، وممتص الصدمات، وشاشة OLED، ووحدة I²C، ووحدة PPM (تعديل موضع النبض)، وزر أمان مع صفارة، وأسلاك.

رحلة Pixhawk 2.4.8 هذه تأتي وحدة التحكم مزودة ببطاقة 4G TF وزر أمان وجرس وأسلاك للمخرجات المساعدة. كما أنه يتميز بوحدة TELEM مع مدخلين للطاقة، ومنفذ تسلسلي، وقنوات ADC (محول تناظري إلى رقمي). بالإضافة إلى ذلك، فهي تتمتع بإمكانيات نظام تحديد المواقع العالمي (GPS) وتتطلب طاقة لتعمل.

تلزم معايرة بطاقة VCC ونظام تحديد المواقع العالمي (GPS) وبطاقة SD في الوضع "مستقر" بجهد بطارية يبلغ 11.32 فولت. بالإضافة إلى ذلك، لا تتوفر بيانات GPS. تم تجهيز التسليح المسبق، وتم تمكين EKF (مرشح كالمان الممتد).