Pixhawk PX4 الطيار الآلي PIX 2.4.8 32Bit التحكم في الطيران - مع PX4FMU PX4IO مفتاح الأمان الجرس 4G SD لطائرة RC بدون طيار متعددة الدوار
Pixhawk PX4 الطيار الآلي PIX 2.4.8 32Bit التحكم في الطيران - مع PX4FMU PX4IO مفتاح الأمان الجرس 4G SD لطائرة RC بدون طيار متعددة الدوار
RCDrone
تعذر تحميل توفر الالتقاط
مواصفات Pixhawk PX4 Autopilot PIX 2.4.8 32Bit التحكم في الطيران
الاتصال اللاسلكي: التحكم في الأسلاك
الاستخدام: عام
الأصل: البر الرئيسي للصين

- تتكامل اللوحة مع PX4FMU+PX4IO
- Pixhawk مزود بتقنية مستشعر وشريحة 32 بت جديدة
الميزات:
- معالج CortexM4 ARM المتقدم 32 بت عالي الأداء، يمكنه تشغيل RTOS NuttX نظام تشغيل في الوقت الفعلي؛
- 14* مخرج PWM/مشغل؛
- واجهة الناقل (UART، I2C، SPI، CAN)؛
- مزود طاقة احتياطية متكامل ووحدة تحكم احتياطية للفشل، يمكن أن تكون وحدة التحكم الرئيسية تم التبديل بأمان إلى التحكم الاحتياطي؛
- توفير الوضع التلقائي واليدوي؛
- توفير إدخال طاقة متكرر ووظيفة نقل الأخطاء؛
- مصباح LED ملون؛
- واجهة صفارة متعددة النغمات؛
- بطاقة Micro SD لتسجيل بيانات الرحلة؛
المعالج:
- ذاكرة فلاش 32 بت 2 ميجا STM32F427 Cortex M4، مع وحدة معالجة الفاصلة العائمة للأجهزة
- التردد الرئيسي: 256 كيلو بايت، ذاكرة الوصول العشوائي 168 ميجا هرتز
- 32 معالج مساعد احتياطي بت STM32F103
المستشعر:
- L3GD20 جيروسكوب رقمي 3 محاور 16 بت
- LSM303D 3 محاور مقياس تسارع/مقياس مغناطيسي 14 بت
- MPU6000 مقياس تسارع/مقياس مغناطيسي 6 محاور
- مقياس الضغط عالي الدقة MS5611
الواجهة:
- 5* UART، 1*جهد عالي متوافق، 2*التحكم في تدفق الأجهزة
- 2* CAN
- القمر الصناعي DSM/DSM2/DSM-X الإدخال المتوافق مع جهاز الاستقبال
- الإدخال والإخراج المتوافق مع Futaba SBUS
- إدخال إشارة PPM
- إدخال RSSI (PWM أو الجهد)
- I2C
- SPI
- إدخال 3.3 و6.6VADC
- واجهة USB MICRO خارجية
تتضمن العبوة:
1 × 2.4.8 وحدة تحكم رئيسية Pixhawk
1 × غلاف التحكم في الطيران
1 × مفتاح أمان
1 × طنان
1 × 6 سنون إلى خط 6 سنون
1 × 4 سنون إلى خط 4 سنون
1 × 3 سنون خط دوبونت
1 × 4G بطاقة SD


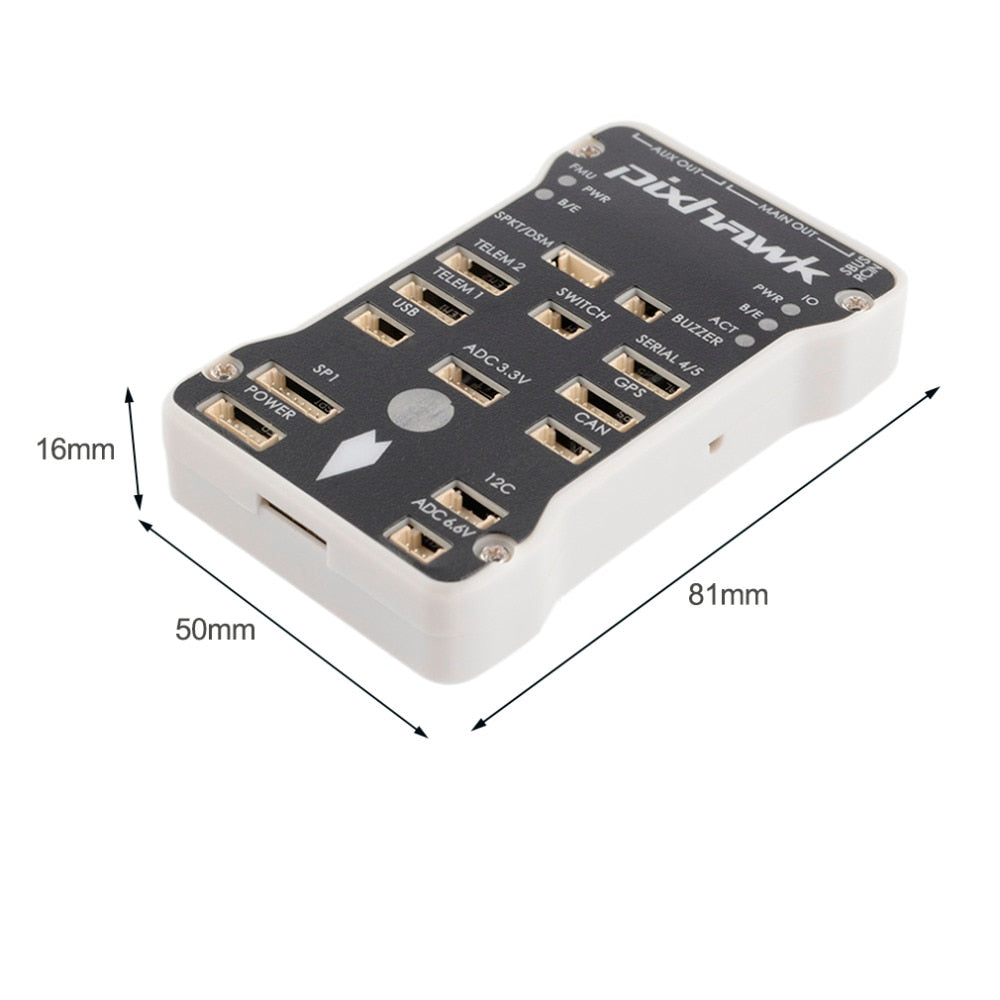
Gps CwN Mou AAut pidunwk a J SKd Jeltm> التبديل telu HTELLM Uso AdcJ Jv Tower migce Adgody محول.


نظام الطيار الآلي Pixhawk PX4 لـ طائرة بدون طيار RC ذاتية الصنع مع تحكم في الطيران بسرعة 2.4 جيجا هرتز، تتضمن زر تبديل أمان PX4FMU وPX4IO، متوافق مع بطاقة SD 4G. SPKT/DSM BUZZER TELEM 2 Switch Serial 4/5TELEM 1 GPS USB ADC3.Jv CAN 'Sw SPI 12C POWER ADC 66v KG UNITARE ONIOFF CAPACiTTsooOGXI G Idepv 4oo
Related Collections