PyDrone Python Programming Drone - Github مفتوح المصدر سهل التطوير ESP-S3 DIY Drone Kit
PyDrone Python Programming Drone - Github مفتوح المصدر سهل التطوير ESP-S3 DIY Drone Kit
RCDrone
تعذر تحميل توفر الالتقاط
ملخص
ال برمجة طائرة بدون طيار باستخدام بايثون هي طائرة رباعية المراوح مفتوحة المصدر مصممة لهواة الطائرات والمعلمين والمطورين. تعمل بمنصة ESP32-S3، وتدعم برمجة Python للتخصيص السلس والتطوير الثانوي. بفضل تصميمها خفيف الوزن الذي يبلغ 42 جرامًا فقط وأبعادها المدمجة (130 × 130 مم)، توفر الطائرة بدون طيار مرونة عالية للتطبيقات الداخلية والخارجية. يتيح إطارها المبتكر التجميع السهل دون لحام، مما يجعلها مثالية للطلاب والهواة والمهندسين الذين يتطلعون إلى استكشاف تكنولوجيا الطائرات بدون طيار. سواء كنت تتعلم أو تجرب أو تطور تطبيقات طائرات بدون طيار متقدمة، فإن PyDrone هي المنصة المثالية للبدء.
الميزات الرئيسية
- تطوير مفتوح المصدر:متوافق تمامًا مع Python، ويدعم التطوير الثانوي لتطبيقات الطائرات بدون طيار المخصصة.
- سهل الاستخدام:تجميع بسيط لا يتطلب لحام، مما يجعله مناسبًا للمبتدئين.
- أوضاع طيران متعددة:يتضمن تثبيت الارتفاع، ووضع عدم الرأس، والإقلاع/الهبوط/التتبع بمفتاح واحد.
- خيارات التحكم المتعددة:قابلة للتشغيل عبر البلوتوث (نطاق 60 مترًا) أو واي فاي (نطاق 120 مترًا).
- إدارة الطاقة بكفاءة:لوحة التحكم الرئيسية تدعم الشحن المباشر للبطارية الليثيوم.
- تصميم محمول:خفيف الوزن (42 جرامًا) وصغير الحجم لسهولة النقل والتخزين.
- دروس تعليمية شاملة:مصحوب بمجموعة كاملة من الوثائق وموارد GitHub للتعلم والتطوير السلس.
تحديد
طائرة رباعية الدفع من طراز باي درون
- وزن:42 جرامًا (بما في ذلك البطارية والغطاء الواقي).
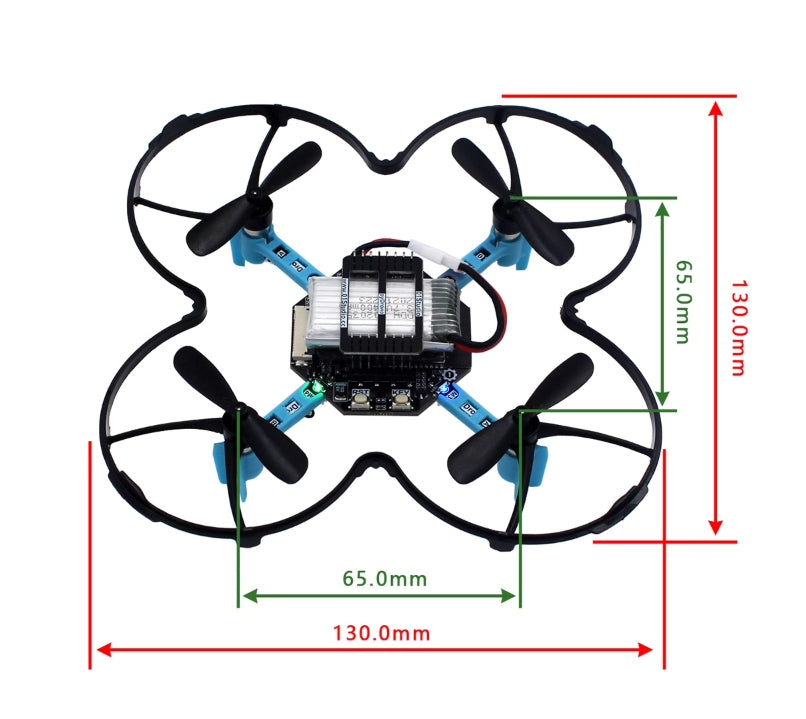
- أبعاد: 130 × 130 ملم (بما في ذلك الغطاء الواقي).
- وقت الرحلة:
- بطارية 400 مللي أمبير: ~8 دقائق.
- بطارية 550 مللي أمبير: ~12 دقيقة.
- مسافة التحكم:
- بلوتوث (BLE): 60م.
- واي فاي: 120م.
- دعم البرمجة:التطوير الثانوي المبني على بايثون.
التحكم عن بعد في PyController
- وضع التشغيل:بلوتوث (BLE) أو واي فاي.
- مسافة التواصل:
- BLE: 60م.
- واي فاي: 120م.
- عرض:شاشة ملونة مقاس 1.54 بوصة، بدقة 240 × 240.
- سعة البطارية:1200 مللي أمبير.
- وقت التشغيل:~6 ساعات.
- متانة عصا التحكم:أكثر من مليون دورة.
- أبعاد: 155 × 110 ملم.
- وزن:132 جرامًا (بما في ذلك البطارية).
موارد الأجهزة
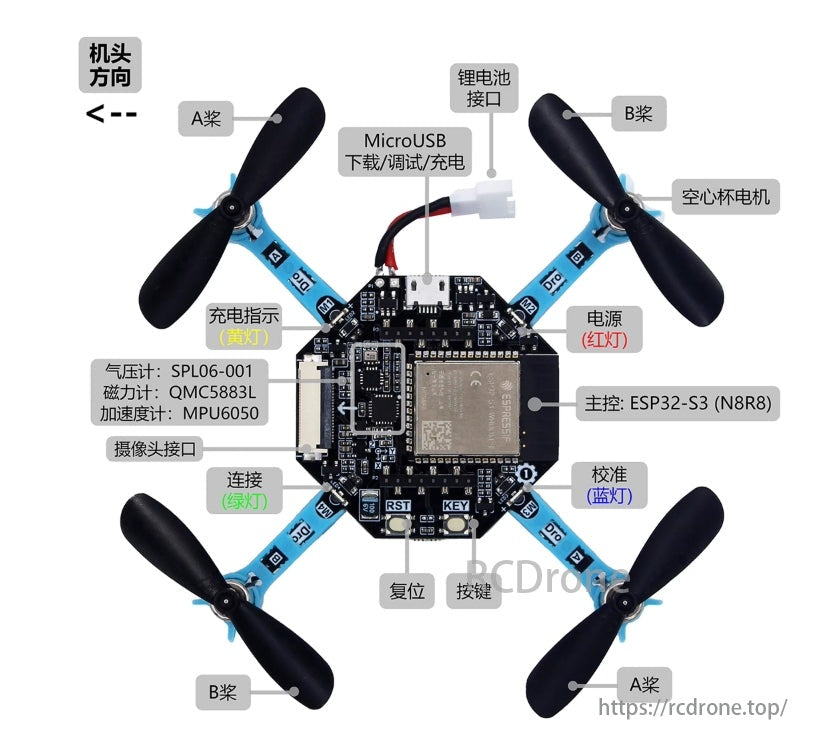
- وحدة التحكم الرئيسية:ESP32-S3-WROOM-1 (ذاكرة وصول عشوائي سعتها 8 ميجابايت، وذاكرة فلاش سعتها 8 ميجابايت).
- المحركات:4 × 716 محركات بدون قلب.
- المراوح:4 × 46 مم (قطر الفتحة 0.8 مم).
- أجهزة الاستشعار:
- مقياس التسارع/جيروسكوب: MPU6050.
- مستشعر ضغط الهواء: SPL06-001.
- البوصلة الإلكترونية: QMC5883L.
- واجهة الكاميرا:موصل OV2640 (FPC-24P-0.5MM).
- منفذ يو اس بي:MicroUSB للتصحيح والشحن.
- بطارية:بطارية ليثيوم بوليمر 400 مللي أمبير في الساعة (3.7 فولت).
قائمة الحزم
- 1 × لوحة التحكم الرئيسية لطائرة PyDrone Quadcopter.
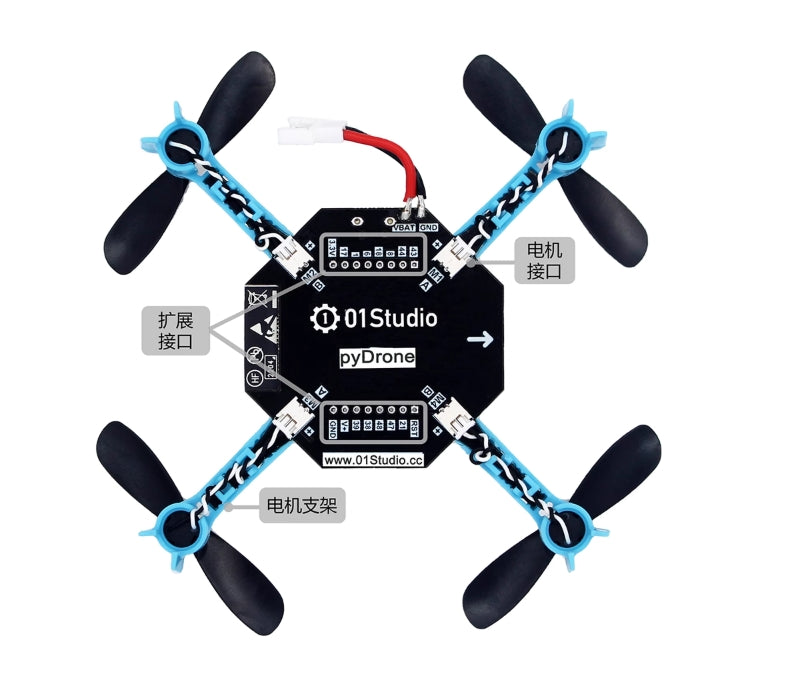
- 1 × لوحة غطاء البطارية.
- 2 × موصلات دبوس طويلة.
- 4 × دعامات المحرك.
- 4 × 716 محركات تيار مستمر.
- 1 × بطارية ليثيوم 400 مللي أمبير.
- 1 × وسادة مضادة للانزلاق للبطارية.
- 1 × شاحن USB.
- 3 أزواج من المراوح (زوج واحد احتياطي).
- 1 × غطاء حماية للطائرة الرباعية المروحية.
- 1 × كابل MicroUSB.
الموارد المضمنة
- وثائق المستخدم:دليل شامل لإعداد وبرمجة PyDrone.
- GitHub مفتوح المصدر:الوصول إلى الكود المصدر الكامل والموارد الإضافية.
- دروس تعليمية خطوة بخطوة:دليل "Micro-Python من الصفر إلى الواحد" يغطي جميع جوانب برمجة الطائرات بدون طيار وتشغيلها.
ال برمجة طائرة بدون طيار باستخدام بايثون تعتبر منصة PyDrone منصة لا غنى عنها لأي شخص حريص على استكشاف الروبوتات أو تعلم Python أو الانغماس في عالم تطوير الطائرات الرباعية المروحية المثير. بفضل ميزاتها الغنية ومرونتها في استخدام المصادر المفتوحة، تجعل PyDrone التعلم والإبداع في متناول الجميع وممتعين.
تفاصيل
هذه مجموعة إمداد بالطاقة لأجهزة الكمبيوتر اللوحية التي تعمل بالحبر الإلكتروني. وهي تتضمن صندوقًا به كابل شاحن USB صغير ومكونات ضرورية أخرى. وهي مناسبة للاستخدام مع مختلف ماركات أجهزة الكمبيوتر اللوحي التي تعمل بالحبر الإلكتروني.
سماعات استوديو عالية الجودة بقوة 0.9 وات ومحركات 8x8 مم لإعادة إنتاج صوت مفصل وارتداء مريح أثناء إنتاج الموسيقى أو المزج.

بنك طاقة قابل لإعادة الشحن للطائرات بدون طيار والأجهزة مع شاحن micro USB وسعة عالية 400 مللي أمبير في الساعة.
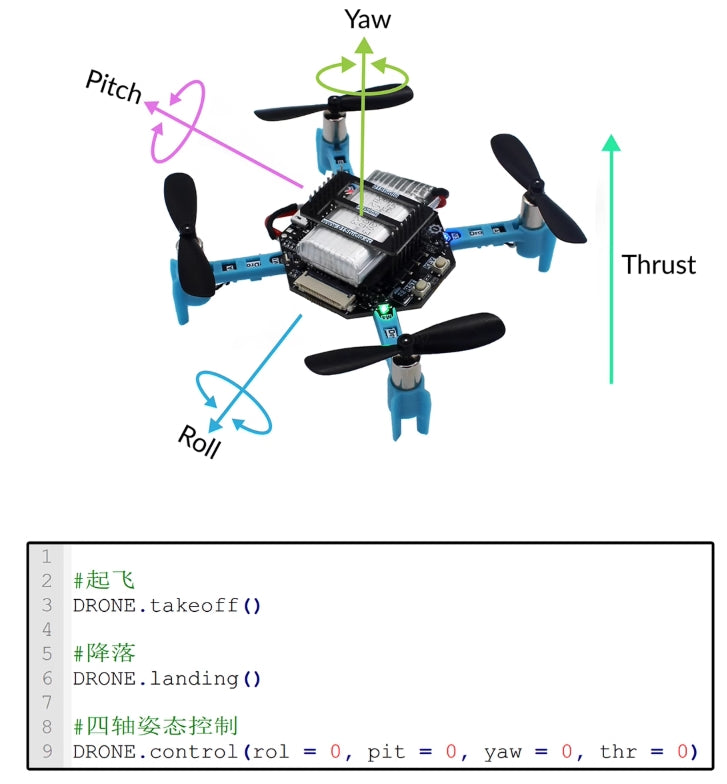
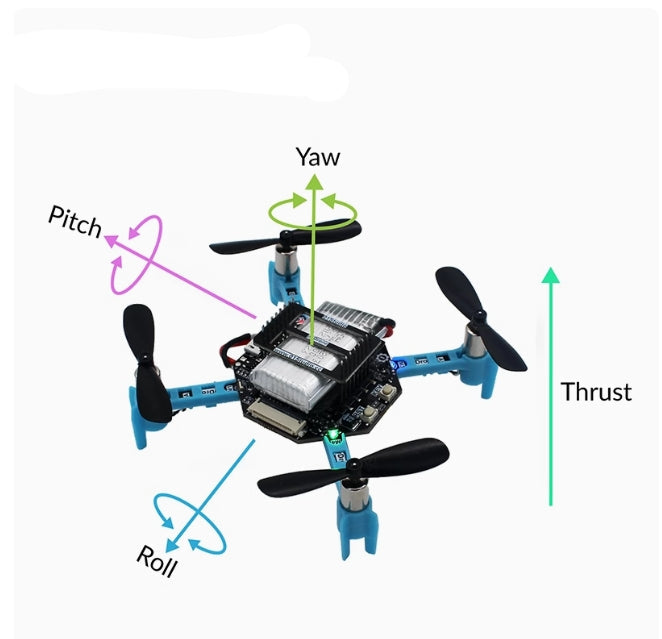
تتميز هذه الطائرة بدون طيار بقدرتها على التحكم في اتجاه الانحراف، مما يسمح بحركات دقيقة. كما أنها تتضمن وظائف الإقلاع والهبوط، مما يجعلها سهلة الاستخدام.

طائرة pyDrone RAET Studio Arch Drone HA بقطر 0.316 بوصة وطول 7 أقدام
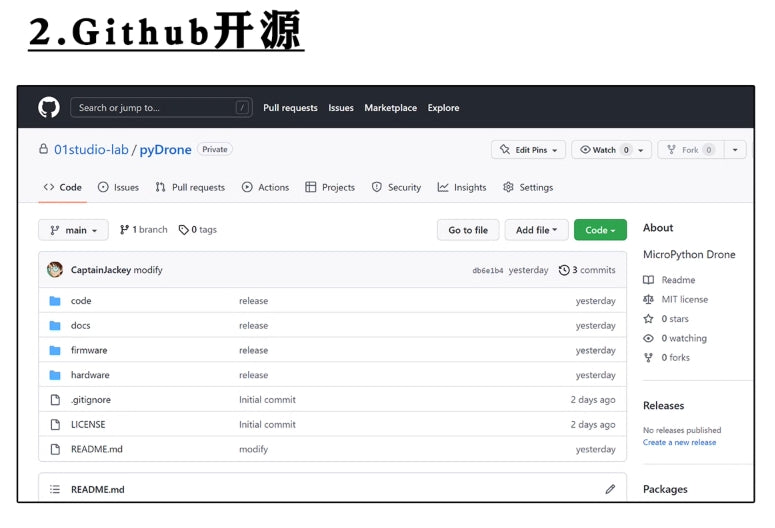
GitHub Sedic Lab لبناء وسحب المهام والقضايا واستكشاف السوق استكشاف O1 Studio-Lab Python Drone رقم القطعة دبابيس مشاهدة I Issue؛ Pull Request Actions Project Security Insights Settings Main Branch 0.0 Tags Go to File Add Code ~ About MicroPython Drone Captain Jackey تم تعديله بالأمس إصدار الكود الإطار الزمني المقدر 0 تم إصدار نفس المستندات بالأمس 0 مشاهدة استدعاء البرامج الثابتة بالأمس 0 تم إطلاق Torque Hardware بالأمس تجاهل الالتزام الأولي منذ أيام إصدارات الترخيص الالتزام الأولي منذ أيام Runner؛ تم النشر اليوم تم جعل README.md قابلاً للقراءة بالأمس ترخيص حزمة README.md
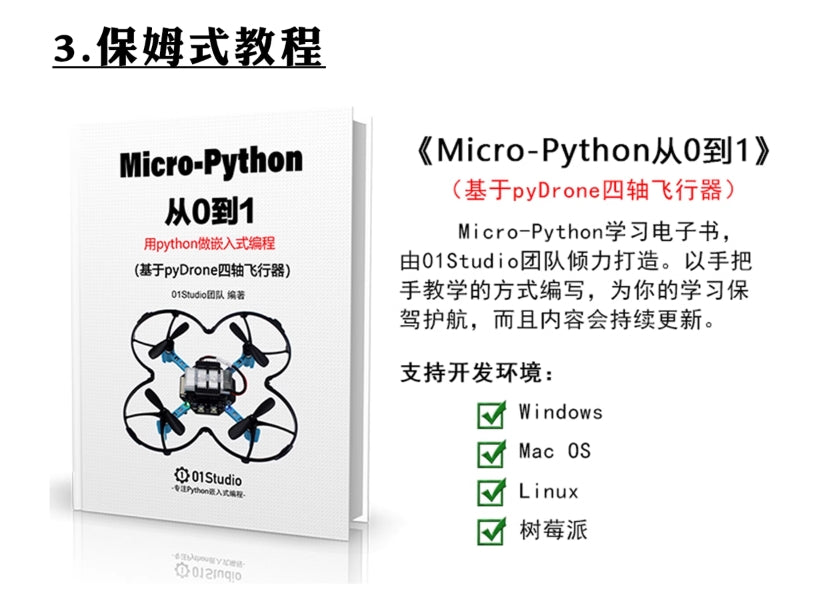
طائرة بدون طيار EW-i Micro-Python للنمذجة والرسوم المتحركة ثلاثية الأبعاد، متوافقة مع أنظمة التشغيل Windows وMac OS وLinux. تتضمن برنامج Studio ودروس تعليمية.