




يد روبوت ROBOTERA XHAND 1 - 12 درجة حرية، أطراف أصابع لمسية 270°، قوة قبضة 80 نيوتن، رفع حتى 25 كجم، تدعم EtherCAT/RS485، جاهزة لنظام ROS
يد روبوت ROBOTERA XHAND 1 - 12 درجة حرية، أطراف أصابع لمسية 270°، قوة قبضة 80 نيوتن، رفع حتى 25 كجم، تدعم EtherCAT/RS485، جاهزة لنظام ROS
ROBOTERA
تعذر تحميل توفر الالتقاط
نظرة عامة
روبوتيرا XHAND 1 هو يد روبوتية بخمسة أصابع مع وحدات مفاصل مدفوعة مباشرة بالكامل و12 درجة حرية نشطة. اليد بحجم يد الإنسان (191 مم × 94 مم × 47 مم) ومصممة للتلاعب الدقيق مع استشعار لمسي عالي الدقة، وقوة قبضة قوية، وواجهات صديقة للمطورين لأبحاث الروبوتات والتكامل.
الميزات الرئيسية
- معمارية دفع مباشر كاملة مع وحدات مفاصل مدفوعة بالتروس ومتحكم بها بالقوة (3 في الإبهام؛ 9 عبر الأصابع الأربعة الأخرى).
- 12 درجة حرية نشطة بالكامل؛ حركة جانبية للإصبع السبابة بمقدار +/-15° للتلاعب المعقد في اليد.
- أداء قبضة عالي: قوة طرف الإصبع 15N؛ أقصى قوة قبضة 80N؛ أقصى وزن يمكن الإمساك به يصل إلى 25 كجم (راحة اليد لأعلى) و16 كجم (راحة اليد لليسار).
- تشغيل عالي السرعة يدعم >2Hz تكرار الفتح/الإغلاق؛ تم إثبات النقر بالإصبع حتى 10 CPS (نقرات في الثانية).
- 270° تغطية لمسية طرف الإصبع مع خمسة مستشعرات مصفوفة ثلاثية الأبعاد؛ دقة اليد الكاملة 12x10 لكل طرف إصبع x 5.
- استشعار القوة ثلاثي الأبعاد بما في ذلك القوى المماسية (X و Y)؛ دقة إعادة تحديد موضع طرف الإصبع +/-0.20 مم.
- قابل للقيادة من الخلف مع تخميد <= 0.1 نيوتن متر؛ التحكم في القوة عبر حلقة التيار والتحكم في القوة-الموقع للتفاعل المتوافق.
- اتصال سهل للمطورين: EtherCAT و RS485 (USB)؛ متوافق مع ROS1/ROS2، أوبونتو (لينكس)، هياكل x86 و ARM، TwinCAT، وأذرع الروبوت الشائعة (بما في ذلك xARM، Realman، UR).
- تصنيف المتانة لعدد 1,000,000 دورة قبض بدون حمل؛ درجة حرارة التشغيل -20°C ~ 60°C.
للاستفسارات، دعم التكامل، أو الشراء بالجملة، اتصل بـ [email protected] or زيارة https://rcdrone.top/.
المواصفات
| المعلمة | القيمة |
|---|---|
| الوزن | 1100 جرام |
| الأبعاد (طول x عرض x ارتفاع) | 191 مم x 94 مم x 47 مم (حجم يد البالغين) |
| درجة الحرية النشطة (الإجمالي) | 12 |
| درجة الحرية السلبية (الإجمالي) | 0 |
| توزيع درجة الحرية | الإبهام x 3؛ السبابة x 3؛ الوسطى x 2؛ البنصر x 2؛ الخنصر x 2 |
| تشغيل/نقل الإبهام | وحدة مفصلية مدفوعة بالتروس ومتحكم بها بالقوة عدد 3 |
| تشغيل/نقل الأصابع الأربعة | وحدة مفصلية مدفوعة بالتروس ومتحكم بها بالقوة عدد 9 |
| تكوين أطراف الأصابع | أطراف أصابع دائرية أو مستديرة |
| التأرجح الجانبي | -15°~+15° (السبابة) |
| دقة تحديد موضع تكرار طرف الإصبع | +/− 0.20 مم |
| أنماط التحكم | تحكم في الموضع (تخميد منخفض/تخميد عالي)، تحكم في القوة عبر حلقة التيار، تحكم في القوة-الموضع |
| قوة طرف الإصبع | 15N |
| أقصى قوة قبض (اليد بالكامل) | 80N |
| أقصى وزن للقبض (راحة اليد اليسرى) | 16 كجم |
| أقصى وزن للقبض (راحة اليد لأعلى) | 25 كجم |
| أقصى معارضة للإبهام | الخنصر الصغير |
| سرعة تكرار الفتح/الإغلاق | >2Hz |
| تخميد القيادة العكسية (قابل للقيادة العكسية) | <= 0.1 Nm |
| التغطية اللمسية | 270° إحاطة بأطراف الأصابع الخمسة |
| عدد المستشعرات اللمسية | خمسة مستشعرات مصفوفة لمسية ثلاثية الأبعاد بزاوية 270° على خمسة أطراف أصابع |
| دقة اللمس (اليد بالكامل) | 12x10 (إحاطة بزاوية 270° لكل طرف إصبع) x 5 |
| أبعاد الاستشعار اللمسي | استشعار القوة ثلاثي الأبعاد (بما في ذلك القوى المماسية X و Y) |
| تردد التحكم باليد بالكامل | 83Hz |
| معدل الاتصال | EtherCAT: 100MHz; RS485: 3MHz |
| معلمات الاستشعار | أطراف الأصابع: 120 قوة مصفوفة ثلاثية الأبعاد؛ المفاصل: الموقع، السرعة، درجة الحرارة، التيار (عزم الدوران) |
| معلمات التحكم | موضع المفصل؛ عزم المفصل؛ معامل صلابة المفصل؛ معامل تخميد المفصل |
| دورات الإمساك بدون حمل | 1,000,000 دورة |
| نطاق درجة حرارة التشغيل | -20°C ~ 60°C |
| جهد العمل | 24V ~ 72V |
| التيار الساكن | 0.15A @48V, 7W |
| التيار الأقصى | 2.5A @48V, 120W |
| واجهة الاتصال | RS485 (USB)، EtherCAT |
التطبيقات
- التحكم عن بعد: يدعم التحكم عن بعد باستخدام MR والقفازات؛ التحكم عن بعد باستخدام Vision Pro؛ قفازات Manus؛ Pico/Meta Quest.
- دمج الذراع الروبوتية والإنسانية: متوافق مع xARM وRealman وUR وأذرع روبوتية أخرى.
- البحث والمحاكاة: محاكاة دقيقة لـ URDF، محاكاة الاستشعار اللمسي؛ مناسب للتعلم المعزز باستخدام Isaac Gym وMujoco.
- التفاعل بين الإنسان والآلة وتشغيل أدوات الإنسان مع التحكم في القوة المتوافقة.
الكتيبات
Xhand_adapter.stp
MH2.25_right_stp.zip
MH2.25_left_stp.zip
XHand_Control_ROS_Documentation.pdf
X-Hand_1_Product_Manual_1.0.pdf
X-Hand_1_User_Quick_Start_Instructions_1.0.pdf
التفاصيل

يد ROBOTERA XHAND1 الروبوتية مع قيادة مباشرة كاملة، تقدم حرية حقيقية ومهارة متقدمة.

XHAND1 من ROBOTERA: يد إنسانية بخمسة أصابع مع 12 درجة من الحرية، ومستشعرات لمسية بزاوية 270° لكل طرف إصبع، وقوة قبض تصل إلى 80N، وسعة تحميل تصل إلى 25 كجم. مصممة للمهام المعقدة والتعامل مع الأدوات.

XHAND 1: أول يد ماهرة مع وحدات قيادة مباشرة لكل مفصل. تتميز بمحركات لاسلكية عالية القوة، ومخفضات ذات ت damping منخفض، ومشفرات دقيقة، ووحدات مفصلية متكاملة تم تطويرها ذاتيًا لعمليات الروبوت المتقدمة.
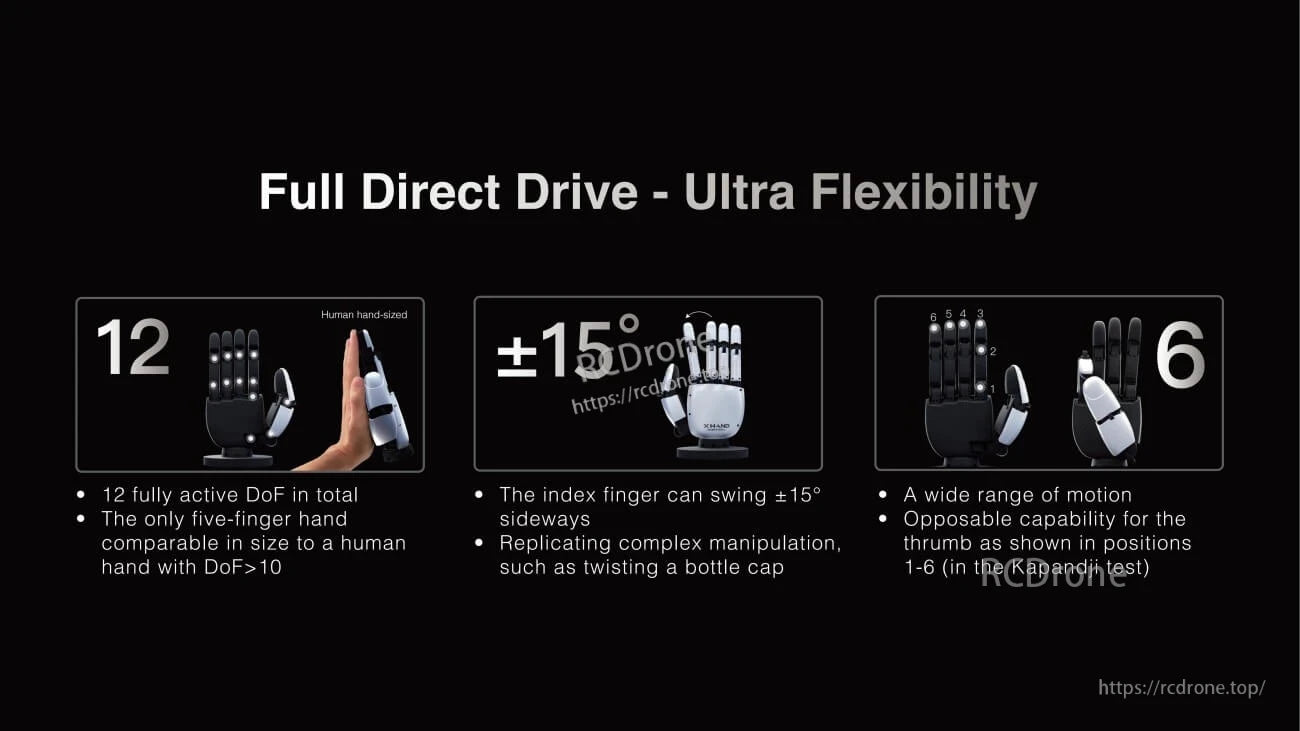
يد ROBOTERA XHAND 1 هي يد روبوتية مرنة للغاية بحجم الإنسان مع 12 درجة من الحرية النشطة. إصبع السبابة يتحرك ±15° جانبياً للمهام المعقدة، ويقدم الإبهام ستة أوضاع قابلة للمعارضة للتلاعب المتنوع.

روبوتيرا XHAND 1: تحميل 25 كجم، قوة قبضة 80 نيوتن، قيادة مباشرة كاملة، تتفوق على الحلول المماثلة المدفوعة بالروابط/الأوتار.

يد روبوتية ذات قيادة مباشرة كاملة تحقق 10 دورات في الثانية مع سرعة مدفوعة بالتروس، وعزم دوران يزيد عن 1 نيوتن متر، متفوقة على أنظمة الروابط والأوتار لأداء ألعاب متفوق.

روبوتيرا XHAND 1 يحتوي على مستشعرات أطراف أصابع بزاوية 270° مع >100 نقطة ودقة 0.05 نيوتن لاستشعار القوة ثلاثية الأبعاد، واللمس، ودرجة الحرارة، مما يضمن أداء قبضة متفوق.
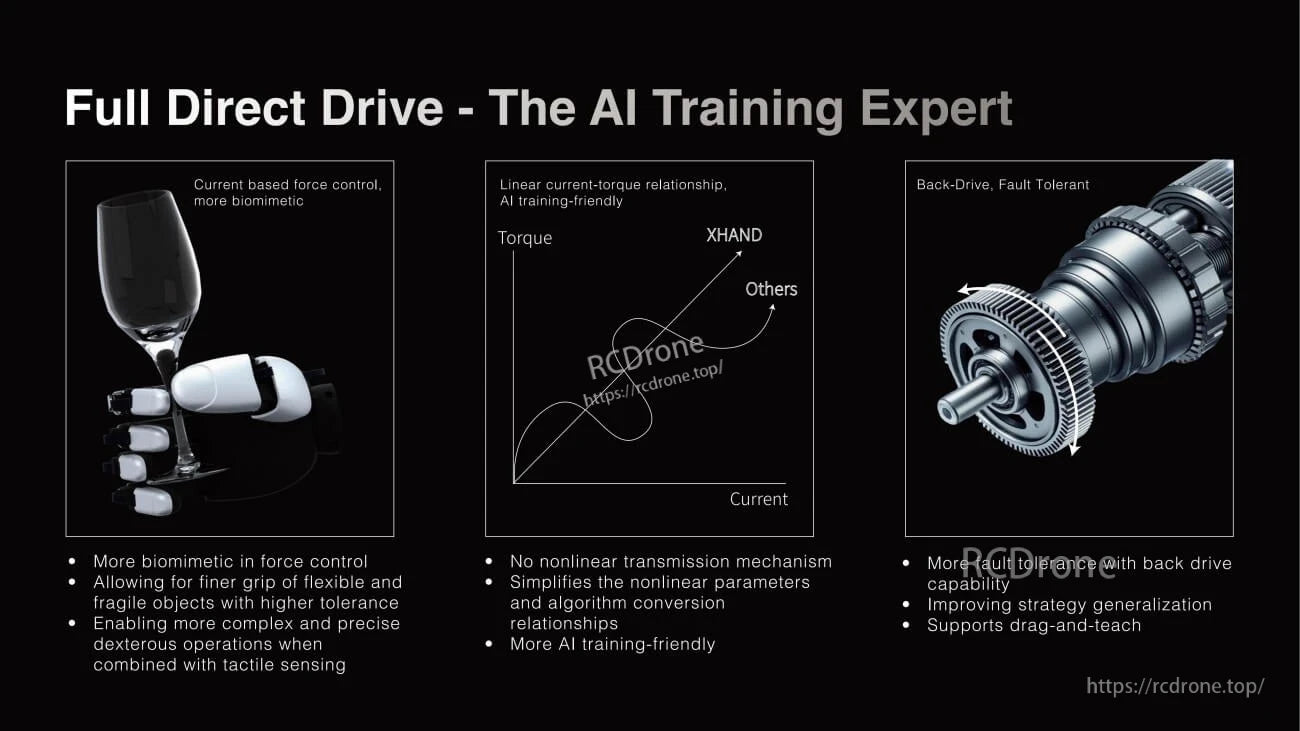
روبوتيرا XHAND 1 يقدم تحكمًا حيويًا في القوة، استجابة عزم الدوران-التيار خطية لتدريب الذكاء الاصطناعي، وتحمل خطأ القيادة العكسية—مما يمكّن من التعامل الدقيق، والخوارزميات المبسطة، ودعم السحب والتعليم، وتحسين تعميم الاستراتيجيات.
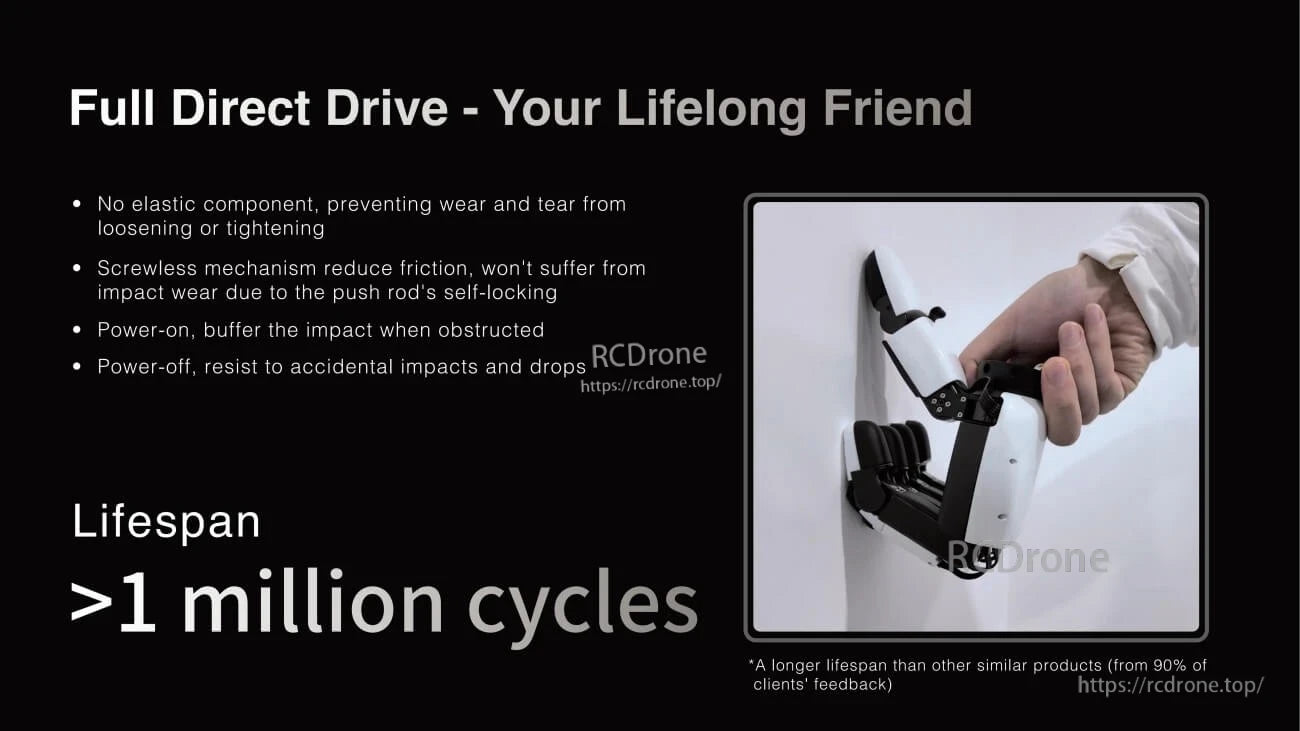
تقدم اليد الروبوتية ذات الدفع المباشر الكامل متانة دون أجزاء مرنة أو براغي، وامتصاص للصدمات عند التشغيل، ومقاومة للسقوط عند الإيقاف، وعمر افتراضي يتجاوز مليون دورة - متفوقة على المنتجات المماثلة وفقًا لتعليقات العملاء.

يد ROBOTERA XHAND 1 تدعم التشغيل عن بُعد باستخدام MR والقفازات، ومتوافقة مع ROS1/ROS2 وUbuntu على x64/ARM. تحتوي على EtherCAT/TwinCAT/RS485 للتكامل مع xARM، Realman، وأذرع الروبوت UR. تقدم نمذجة URDF دقيقة ومحاكاة استشعار لمسية. مصممة لتطبيقات الروبوتات الصديقة للمطورين مع مرونة عبر الأنظمة الأساسية وبروتوكولات تحكم متقدمة.
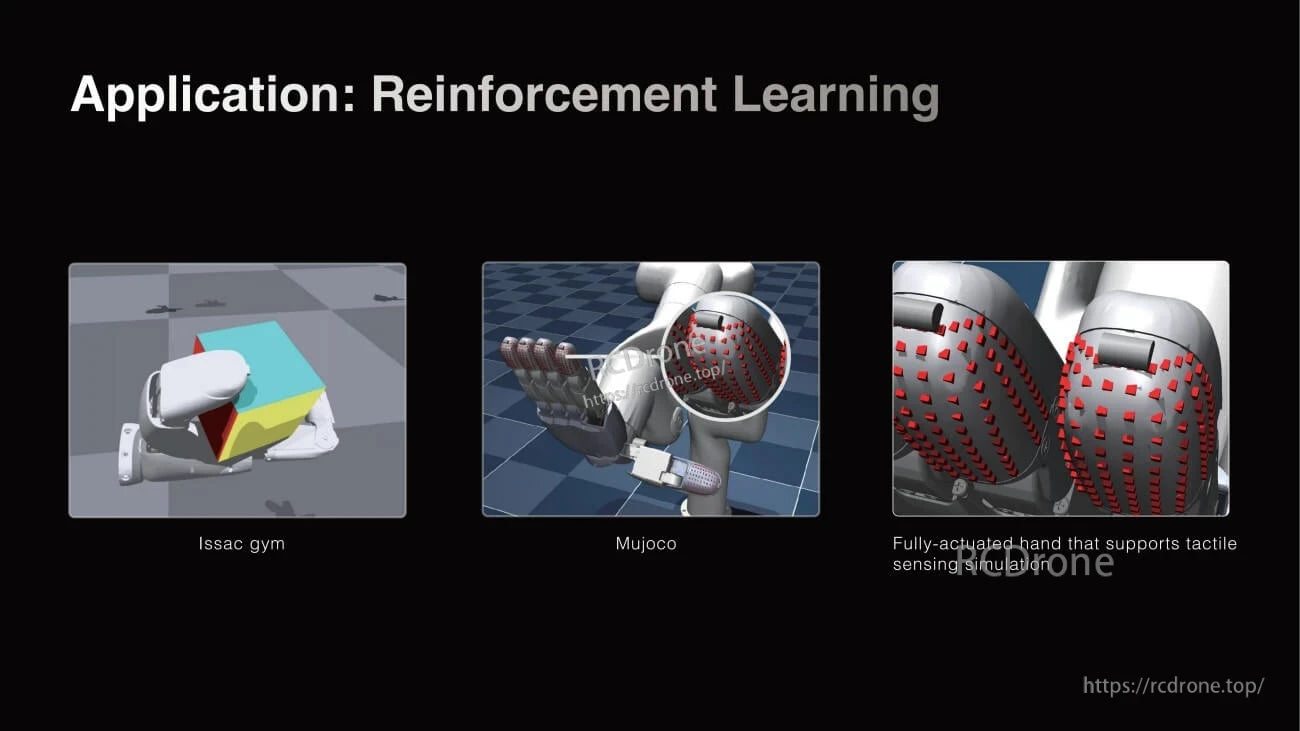
تطبيقات التعلم المعزز: Issac gym، Mujoco، ويد كاملة الحركة مع محاكاة استشعار لمسية لبيئات التحكم والتدريب الروبوتية المتقدمة.
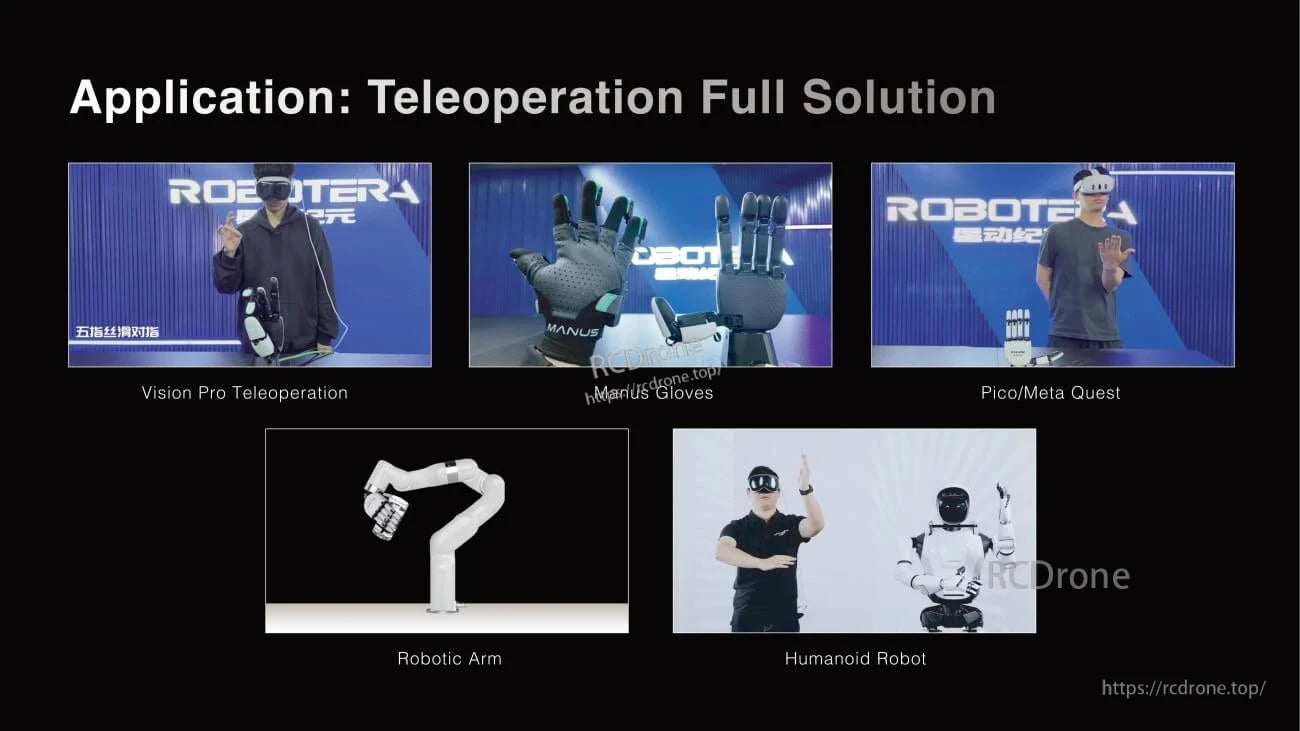
حل التحكم عن بعد الكامل الذي يتميز بـ Vision Pro، قفازات Manus، Pico/Meta Quest، ذراع روبوت، وروبوت بشري للتحكم عن بعد المتقدم.
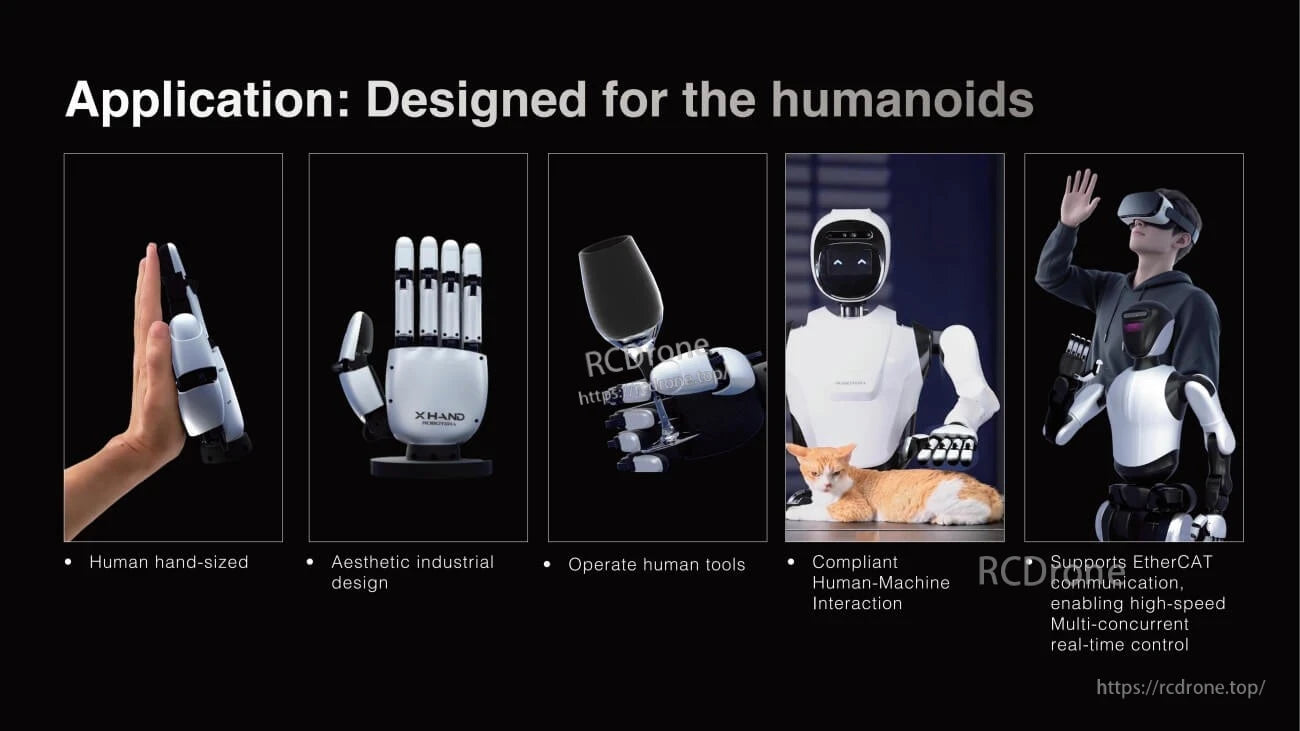
يد روبوت بحجم الإنسان بتصميم جمالي، تعمل على الأدوات، تمكن من التفاعل المتوافق، تدعم EtherCAT للتحكم في الوقت الحقيقي.
Related Collections




