طائرة بدون طيار S2-F290 قابلة للبرمجة - Pixwawk مفتوحة المصدر ROS SLAM AI المستوى الصناعي للتطوير الثانوي لتحدي الطائرات بدون طيار
طائرة بدون طيار S2-F290 قابلة للبرمجة - Pixwawk مفتوحة المصدر ROS SLAM AI المستوى الصناعي للتطوير الثانوي لتحدي الطائرات بدون طيار
RCDrone
تعذر تحميل توفر الالتقاط
ملخص
ال طائرة بدون طيار قابلة للبرمجة S2-F290 هو أداء عالي طائرة بدون طيار صناعية تم تصميمه للتطوير الثانوي وتحديات الطائرات بدون طيار. يتميز قدرة الحمولة 2400 جرام، أ بطارية 6S 6000 مللي أمبير، و أ الحد الأقصى لمسافة التحكم 10 كم، فهو يوفر الدقة مع دقة تحديد المواقع GPS ≈1–2 متر و مقاومة الرياح من المستوى 3 إلى 4. مدعوم بواسطة وحدة تحكم الطيران Pixhawk 2.4.8 مع تقنية ROS SLAM مفتوحة المصدرتدعم الطائرة بدون طيار وظائف متقدمة مثل رسم خرائط LiDAR ثلاثية الأبعاد، والتعرف على الكائنات المستندة إلى YOLO، والطيران التكويني. إنه إطار من ألياف الكربون 3 مم يضمن متانة واستقرارًا استثنائيين، تم اختباره في ظروف قاسية. المنصة قابلة للتخصيص بدرجة كبيرة، وتوفر ميزات مثل دعم محطة QGC الأرضية باللغتين الصينية والإنجليزية، وقابلية التوسع المعياري، والبرامج التعليمية الشاملة، مما يجعلها مثالية لتطبيقات البحث والمنافسة والتطوير.
مواصفة
الطائرات
| المعلمة | مواصفة |
|---|---|
| اسم | طائرة بدون طيار قابلة للبرمجة S2-F290 |
| وزن الحمولة | 2400 جرام |
| نموذج | س2-اف290 |
| دقة تحديد المواقع GPS | ≈1–2م |
| قاعدة العجلات | 290 ملم |
| الحد الأقصى لوزن الإقلاع | 3190 جرام |
| بطارية | بطارية قياسية 6000 مللي أمبير في الساعة لجهاز 6S |
| مسافة التحكم | 10 كم (موصى به في حدود 1000 متر) |
| مقاومة الرياح | المستوى 3-4 |
| بيئة التشغيل | داخلي/خارجي |
| نتائج اختبار التحمل | تفاصيل |
|---|---|
| المراوح | 7 بوصة |
| سعة البطارية | 6S 6000 مللي أمبير (5300 مللي أمبير مستخدم) |
| بيئة | هادئ |
| وقت الرحلة | 11 دقيقة و 30 ثانية |
جهاز التحكم في الطيران
| عنصر | مواصفة |
|---|---|
| معالج FMU | STM32H743 Cortex-M7، 480 ميجا هرتز، فلاش 2 ميجا بايت، 1 ميجا بايت SRAM |
| معالج الإدخال والإخراج | STM32F103 Cortex-M3، 72 ميجا هرتز، 64 كيلو بايت SRAM |
| أجهزة الاستشعار | مقياس التسارع/جيروسكوب: ICM-42688-P |
| مقياس التسارع/جيروسكوب: BMI055 | |
| مقياس المغناطيسية: IST8310 | |
| البارومتر: MS5611 | |
| الجهد المقدر | أقصى جهد الإدخال: 6 فولت |
| مدخل طاقة USB: 4.75-5.25 فولت | |
| مدخل المؤازرة: 0-36 فولت | |
| التيار المقدر | القياس عن بعد 1 الحد الأقصى لتيار الإخراج: 1 أمبير |
| التيار المشترك للمنافذ الأخرى: 1 أمبير | |
| البيانات الميكانيكية | الأبعاد: 53.3 × 39 × 16.2 ملم |
| الوزن: 39.2 جرام | |
| الموانئ | - 14 مخرج PWM (8 من IO، 6 من FMU) |
| - 2 منفذ تسلسلي للأغراض العامة | |
| - 2 منفذ GPS | |
| - منفذ I2C واحد | |
| - 2 منفذ CAN | |
| - مدخل RC لـ Spektrum/DSM، وS.BUS، وCPPM، وما إلى ذلك. | |
| - منفذ إدخال الطاقة | |
| مميزات اخرى | درجة حرارة التشغيل: -40–85 درجة مئوية |
كمبيوتر على متن الطائرة
| عنصر | مواصفة |
|---|---|
| قوة الحوسبة | 40 توبس |
| وحدة معالجة الرسوميات | 32 نواة Tensor مع وحدة معالجة الرسوميات NVIDIA Ampere التي تحتوي على 1024 نواة |
| وحدة المعالجة المركزية | معالج سداسي النواة Arm Cortex-A78AE v8.2 64 بت، 1.5 جيجاهرتز |
| كبش | 8 جيجابايت 128 بت LPDDR5 68 جيجابايت/ثانية |
| تخزين | بطاقة SD أو NVMe خارجية |
| أقصى تردد لوحدة المعالجة المركزية | 1.5 جيجاهرتز |
جهاز التحكم عن بعد
| عنصر | مواصفة |
|---|---|
| جهد التشغيل | 4.2 فولت |
| تيار التشغيل | 100 مللي أمبير |
| نطاق التردد | 2.4–2.483 جيجاهرتز |
| وزن | 525 جرام |
| أبعاد | 130 × 150 × 20 ملم |
| عمر البطارية | 20 ساعة |
| منفذ الشحن | ميكرو يو اس بي |
| نطاق التحكم | 7 كم |
نظام تحديد المواقع العالمي (جي بي اس)
| عنصر | مواصفة |
|---|---|
| جهاز استقبال الأقمار الصناعية | UBLOX-M9، 92 قناة |
| البوصلة الالكترونية | كيو ام سي 5883ل |
| أنظمة الأقمار الصناعية | نظام تحديد المواقع العالمي L1 C/A، نظام جلوناس L1OF، نظام بيدو B1، نظام جاليليو E1 |
| القنوات الفضائية | 32 |
| معدل التحديث | 25 هرتز |
| دقة تحديد المواقع | 1.5 متر CEP (بيئة مثالية) |
| وقت بدء التشغيل | بدء التشغيل البارد: 24 ثانية، بدء التشغيل الساخن: 1 ثانية |
| أبعاد | 25 × 25 × 8 مم |
| وزن | 12 جرام |
بطارية
| عنصر | مواصفة |
|---|---|
| نوع الموصل | إكس تي 60 |
| تيار الشحن الموصى به | 3-5أ |
| سعة البطارية | 6000 مللي أمبير |
| الجهد الاسمي | 22.2 فولت |
| معدل التفريغ | 75 درجة مئوية |
| أبعاد | 50 × 44 × 158 مم |
| وزن | 816 جرام |
ليدار
| عنصر | مواصفة |
|---|---|
| طول موجة الليزر | 905 نانومتر |
| يتراوح | 40 متر عند 10% انعكاسية، 70 متر عند 80% انعكاسية |
| الحد الأدنى لمنطقة الكشف | 0.1م |
| مجال الرؤية | أفقي: 360 درجة، عمودي: -7 درجة إلى 52 درجة |
| مخرجات سحابة النقاط | 200000 نقطة/ثانية |
| معدل النقاط | 10 هرتز |
| مستوى الحماية | IP67 |
| قوة | 6.5 واط (بيئة 25 درجة مئوية) |
| مدى الجهد | 9–27 فولت تيار مستمر |
| أبعاد | 65 × 65 × 60 مم |
| وزن | 265 جرام |
كاميرا العمق
| عنصر | مواصفة |
|---|---|
| تقنية العمق | الأشعة تحت الحمراء المزدوجة |
| زاوية عرض العمق | 87° × 58° (أفقي × عمودي) |
| دقة العمق | 1280 × 720 |
| دقة العمق | <2% في غضون 2 متر |
| معدل الإطار العميق | 90 إطارًا في الثانية |
| مدى العمق | 0.3–3م |
| أبعاد | 90 × 25 × 25 مم |
| بيئة التشغيل | داخلي/خارجي |
كاميرا ذات عدسة واحدة
| عنصر | مواصفة |
|---|---|
| الدقة القصوى | 2 ميجا بكسل (1920 × 1080) |
| الحد الأقصى لمعدل الإطارات | 30 إطارًا في الثانية |
| مجال الرؤية | ~90 درجة |
| طول الكابل | ~1.5م |
| أبعاد | 35 × 35 × 30 مم |
جدول الوظائف
| مسحة | التكوين الأساسي | اختياري D435 | وحدة اختيارية D435 + 4G |
|---|---|---|---|
| تثبيت الارتفاع، التحليق، العودة إلى المنزل | ✔ | ✔ | ✔ |
| الهبوط، الاستقرار، نقطة مسار الطيران | ✔ | ✔ | ✔ |
| طيران التحكم عن بعد | ✔ | ✔ | ✔ |
| الاتصال بين وحدة التحكم في الطيران والكمبيوتر الموجود على متن الطائرة | ✔ | ✔ | ✔ |
| التعرف على رمز الاستجابة السريعة والهبوط | ✔ | ✔ | ✔ |
| التعرف على الأشياء وإسقاطها | ✔ | ✔ | ✔ |
| رسم الخرائط في وقت واحد وتجنب العوائق | ✔ | ✔ | ✔ |
| رسم خرائط وتحديد المواقع بتقنية LiDAR ثلاثية الأبعاد | ✔ | ✔ | ✔ |
| التعرف على الكائنات استنادًا إلى YOLO | ✘ | ✔ | ✔ |
| التعرف على الأشياء وتتبعها | ✘ | ✔ | ✔ |
| جهاز التحكم عن بعد 4G | ✘ | ✘ | ✔ |
تتضمن الحزمة
التكوين الأساسي
- إطار:إطار من ألياف الكربون F290
- المحركات: 4× محرك تي F100 Kv1100
- خروج:4× FlyFun T-rex 5 45A
- المراوح: 4 × 7 بوصة مراوح ثلاثية الشفرات
- جهاز التحكم في الطيران:Pixhawk6mini
- بطارية:بطارية قياسية 6S بسعة 6000 مللي أمبير في الساعة
- شاحن:شاحن بطارية 6S
- كمبيوتر على متن الطائرة: وحدة جيتسون أورين نانو 8G + WIFI
- القرص الصلب SSD:256 جيجابايت
- ليدار:ليفوكس MID360
- آلة تصوير:كاميرا USB بزاوية واسعة 150 درجة
- جهاز التحكم عن بعد:Cloud T10 (يتضمن جهاز استقبال البيانات)
التكوين الاختياري: D435
يتضمن جميع المكونات من التكوين الأساسي، بالإضافة إلى:
- كاميرا ذات عدسة مزدوجة:د435
التكوين الاختياري: وحدة D435 + 4G
يتضمن جميع المكونات من أساسي إعدادات، بالإضافة إلى:
- كاميرا ذات عدسة مزدوجة:د435
- وحدة 4G
تفاصيل
طائرة بدون طيار قابلة للبرمجة S2-F290
- ✔ الدعم الفني وخدمة ما بعد البيع خالية من المتاعب
- ✔ يوفر أمثلة للمنافسة وقابلة للتخصيص
- ✔ محطة أرضية متنقلة باللغتين الصينية والإنجليزية
- ✔ استقرار عالي وأداء عالي
- ✔ داخلي/خارجي
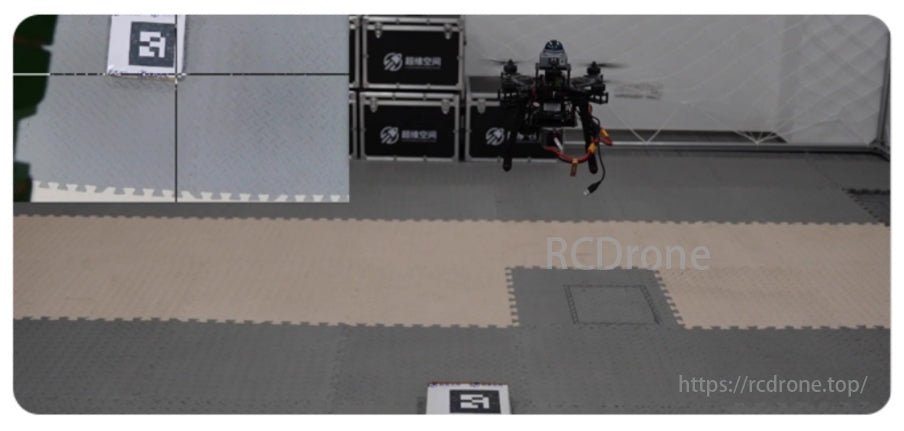
S2-F290 هي طائرة بدون طيار متطورة مصممة خصيصًا لسباقات الطائرات بدون طيار، وهي متخصصة في الاستكشاف والابتكار.تم تصميمه لدمج التكنولوجيا المتقدمة والإبداع غير المحدود، فهو قادر على التكيف مع مختلف البيئات المعقدة، مما يجعل الاستكشاف الجوي أكثر سهولة وفعالية.
تتميز هذه الطائرة بدون طيار بتصميم مدمج وقوة هائلة. وهي تقدم مجموعة كبيرة من الأمثلة التنافسية، مما يسمح للمستخدمين بإتقان أدائها وتحسينه بسرعة. وهي مزودة بمحطة أرضية متنقلة مخصصة باللغتين الصينية والإنجليزية، مما يعزز بشكل كبير من راحة تشغيل الطائرة بدون طيار. بالإضافة إلى ذلك، فهي توفر تفسيرات كود المصدر التنافسية وقابلية التخصيص لضمان تمكن المستخدمين من تحقيق الوظائف المطلوبة في أقصر وقت مع التفوق في السيناريوهات التنافسية.

تلبية احتياجات التنمية / المنافسة / البحث
| فئة | تفاصيل |
|---|---|
| المعرفة الأساسية لـ ROS | - جهاز التحكم عن بعد |
| - التواصل بين مراقب الطيران والكمبيوتر الموجود على متن الطائرة | |
| الوظائف الأساسية | - تخطيط الطريق |
| - التعرف على رمز الاستجابة السريعة وتحديد موقعه | |
| - دورية مستقلة خارج المركبة | |
| وظائف متقدمة | - التعرف على رمز الاستجابة السريعة (QR Code) للهبوط |
| - التعرف على الأشياء وإسقاطها | |
| - رسم الخرائط في وقت واحد وتجنب العوائق | |
| - رسم خرائط وتحديد المواقع بتقنية LiDAR ثلاثية الأبعاد | |
| - التعرف على الكائنات المستند إلى YOLO | |
| - نقل الفيديو عبر الويب | |
| - تشكيل الطيران في الهواء الطلق | |
| - تكوين تعاوني بري جوي | |
| وظائف الكاميرا الاختيارية D435 | - تحديد المواقع المرئية للسيارة VINS |
| - التعرف على الكائنات وتتبعها استنادًا إلى YOLO | |
| وظائف الاتصال 4G الاختيارية | - جهاز التحكم عن بعد 4G |
تجنب العوائق بشكل مستقل وضمان السلامة الشاملة
باستخدام تقنية 3D LiDAR لتجنب العوائق بشكل مستقل، تجمع الطائرة بدون طيار بين التخطيط العالمي للمسار وتجنب العوائق الديناميكية المحلية للكشف بدقة عن العوائق من جميع الاتجاهات. كما تدعم التوقف التلقائي بالإضافة إلى الطيران المستمر، مما يتيح تجنبًا مرنًا للأشياء على طول مسار الطيران، مما يضمن تجربة طيران أكثر أمانًا.

التعرف على رمز الاستجابة السريعة والهبوط
تقوم الطائرة بدون طيار بتنشيط الكاميرا ووحدة التعرف على رمز الاستجابة السريعة للحصول على معلومات الموقع في الوقت الفعلي لرمز الاستجابة السريعة. أثناء الهبوط، تضبط الطائرة بدون طيار موقعها بشكل ديناميكي، مما يضمن محاذاة دقيقة مع مجال رؤية الكاميرا قبل الشروع في الهبوط.
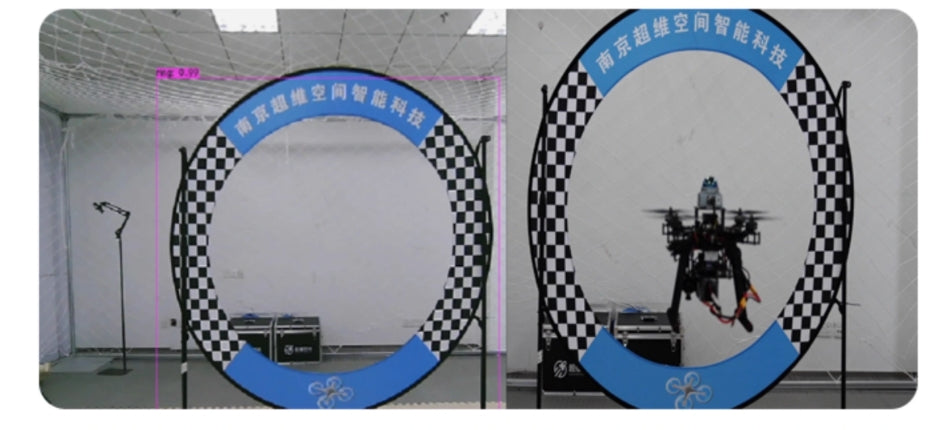
التعرف على الأشياء باستخدام YOLO
تستخدم الطائرة بدون طيار YOLOv8 للتعرف على الأشياء، والحصول على معلومات موضع الإطار الدائري في الوقت الفعلي. وتضبط موضعها بشكل مستقل وتتنقل عبر الإطار الدائري.
تشكيل الطيران في الهواء الطلق
وتستخدم الطائرة بدون طيار تقنية تشكيل السرب، مما يتيح التحكم المنسق لطائرات بدون طيار متعددة لتحقيق رحلة تشكيلية.من خلال الاستفادة من خوارزميات الاتصال والتحكم التعاوني المتقدمة، فإنه يسهل الاتصال في الوقت الحقيقي وتبادل المعلومات بين الطائرات بدون طيار، ومزامنة تحركاتها ومواقعها لتشكيل تشكيل محكم.

تكوين تعاوني بري جوي
تدعم هذه المنصة التكوين التعاوني بين الطائرات بدون طيار البرية والجوية. من خلال الاستفادة من شبكة المنطقة المحلية ذات الهياكل الطوبولوجية لربط الأجهزة، تستخدم اتصالات UDP والبروتوكولات المخصصة لضمان اتصالات عالية السرعة ومستقرة. من خلال التحكم في PID، تحقق متابعة متزامنة بين الطائرة بدون طيار الرئيسية والطائرات بدون طيار المتعددة التابعة، مما يضمن استقرار التكوين والكفاءة التشغيلية.

مثال على المنافسة
يوفر سيناريوهات حصرية للمنافسة مع إرشادات خطوة بخطوة، مما يتيح للمشاركين التكيف بسهولة مع أنواع مختلفة من المسابقات.



مميزات الطائرة بدون طيار القابلة للبرمجة S2-F290
أداء عالي التكلفة
- مُصمم للمبتدئين لتقليل منحنى التعلم وتسهيل إتقان تشغيل الطائرات بدون طيار.
- تم تصميمها لتناسب القدرة على تحمل التكاليف، مما يجعلها طائرة بدون طيار مثالية للتعلم للطلاب والمتحمسين.
استقرار عالي
- تم اختباره في ظروف قاسية مختلفة على مدى ثلاث سنوات.
- مجهز بإطار من ألياف الكربون بسمك 3 مم لتعزيز المتانة والاستقرار.
- يتيح للمستخدمين الحصول على التقدير في تجربتهم الأولى في المنافسة.
قابلية التوسع
- يدعم التخصيص المتقدم للتطبيقات المتنوعة.
- متوافق مع مكونات التوسعة المختلفة لتحسين أداء الطائرة بدون طيار ووظائفها بشكل مستمر.
خدمة ما بعد البيع خالية من القلق
- فريق محترف يقدم التوجيه والدعم الشامل.
- يقدم إصلاحات مجانية للأضرار التي تلحق بالأجهزة نتيجة لأخطاء تشغيلية خلال فترة الضمان (باستثناء الملحقات والبطاريات).
قابلة للتخصيص
- يوفر الدعم للتطوير الحصري في ROS و QGC.
- يدعم دقة عالية تصل إلى أكثر من 98% للخرائط والملاحة.
- متوافق مع وحدات RTK/GPS والشعارات والوظائف الفريدة المختلفة.

تكوين المحطة الأرضية
استخدام برنامج Pixhawk 2.4.8 Flight Controller
تم تجهيز وحدة التحكم في الطيران هذه بأحدث معالج STM32F427 القياسي 32 بت ومقياس الضغط MS5611، وتوفر واجهات وفيرة وأداءً عالي التكلفة كخيار مفتوح المصدر.
1. محطة أرضية QGC مخصصة بشكل حصري
- يحقق أكثر من 98% من التوطين باللغة الصينية.
- يدعم الميزات المتقدمة مثل NTRIP.
2. محطة QGC الأرضية المتنقلة
- توفر نسخة محمولة من محطة QGC الأرضية، مما يتيح التشغيل السلس من الهاتف الذكي.
3. اتصال مباشر عبر Wi-Fi أو 4G
- يمكنك الاتصال بسهولة عبر Wi-Fi للتشغيل باستخدام الهاتف الذكي أو الكمبيوتر.
- ملحوظة:يظهر نظام "ezuav" أنه متصل بالجهاز ولكنه لا يستطيع توفير الوصول إلى الإنترنت.

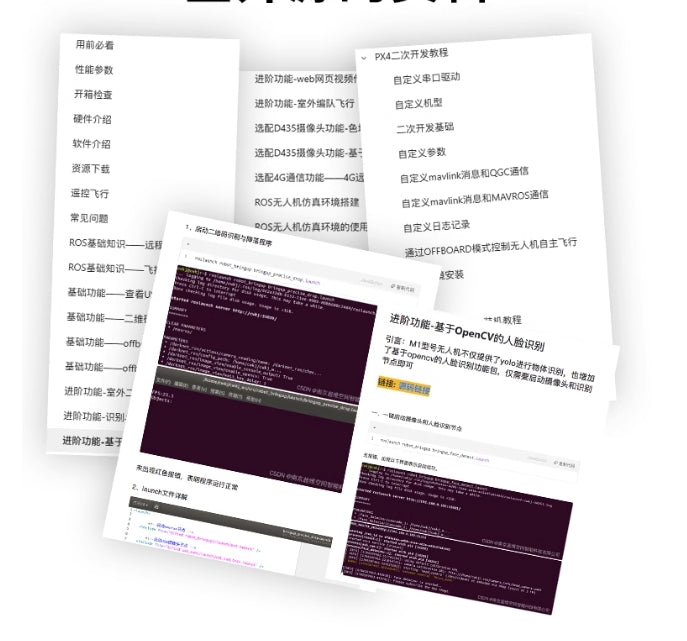
دروس تعليمية شاملة وموارد مفتوحة المصدر بالكامل
- دروس تعليمية مفصلة للغاية حول الاستخدام تغطي جميع جوانب وظيفة الطائرة بدون طيار S2-F290.
- المواد مفتوحة المصدر بالكامل، بما في ذلك:
- مقدمة للبرمجيات ودليل التثبيت.
- برامج تعليمية للميزات الأساسية والمتقدمة، مثل التعرف على الكائنات المستندة إلى OpenCV، والرسم الخرائطي ثلاثي الأبعاد، والطيران المستقل خارج الطائرة.
- تعليمات التطوير المخصصة لاتصالات PX4 وMAVLink.
- الأسئلة الشائعة حول استكشاف الأخطاء وإصلاحها، وتكوين بيئة ROS، والخطوات التشغيلية.