مجموعة محرك سيرفو لذراع الروبوت SO-ARM101 Pro لـ LeRobot (بدون أجزاء مطبوعة ثلاثية الأبعاد) – مفتوحة المصدر، 6 محاور، UART، مشفر 12-بت
مجموعة محرك سيرفو لذراع الروبوت SO-ARM101 Pro لـ LeRobot (بدون أجزاء مطبوعة ثلاثية الأبعاد) – مفتوحة المصدر، 6 محاور، UART، مشفر 12-بت
Seeed Studio
تعذر تحميل توفر الالتقاط
نظرة عامة
SO-ARM101 هو مجموعة محركات سيرفو لذراع الروبوت تم تحسينها للتقليد والتعلم المعزز مع مشاريع LeRobot وHugging Face. تتضمن هذه المجموعة مفتوحة المصدر ومنخفضة التكلفة محركات سيرفو، ولوحات توصيل، وكابلات لإعداد ذراع القائد–التابع الكامل. المجموعة مناسبة للهواة ومصممة للنماذج الأولية السريعة مع موارد وفيرة. مهم: مجموعة المحركات لا تتضمن أجزاء مطبوعة ثلاثية الأبعاد؛ اطلب الهيكل المطبوعة ثلاثية الأبعاد معًا إذا لزم الأمر. توفر Seeed Studio الأجهزة لـ LeRobot.
الميزات الرئيسية
ما الجديد في SO-ARM101
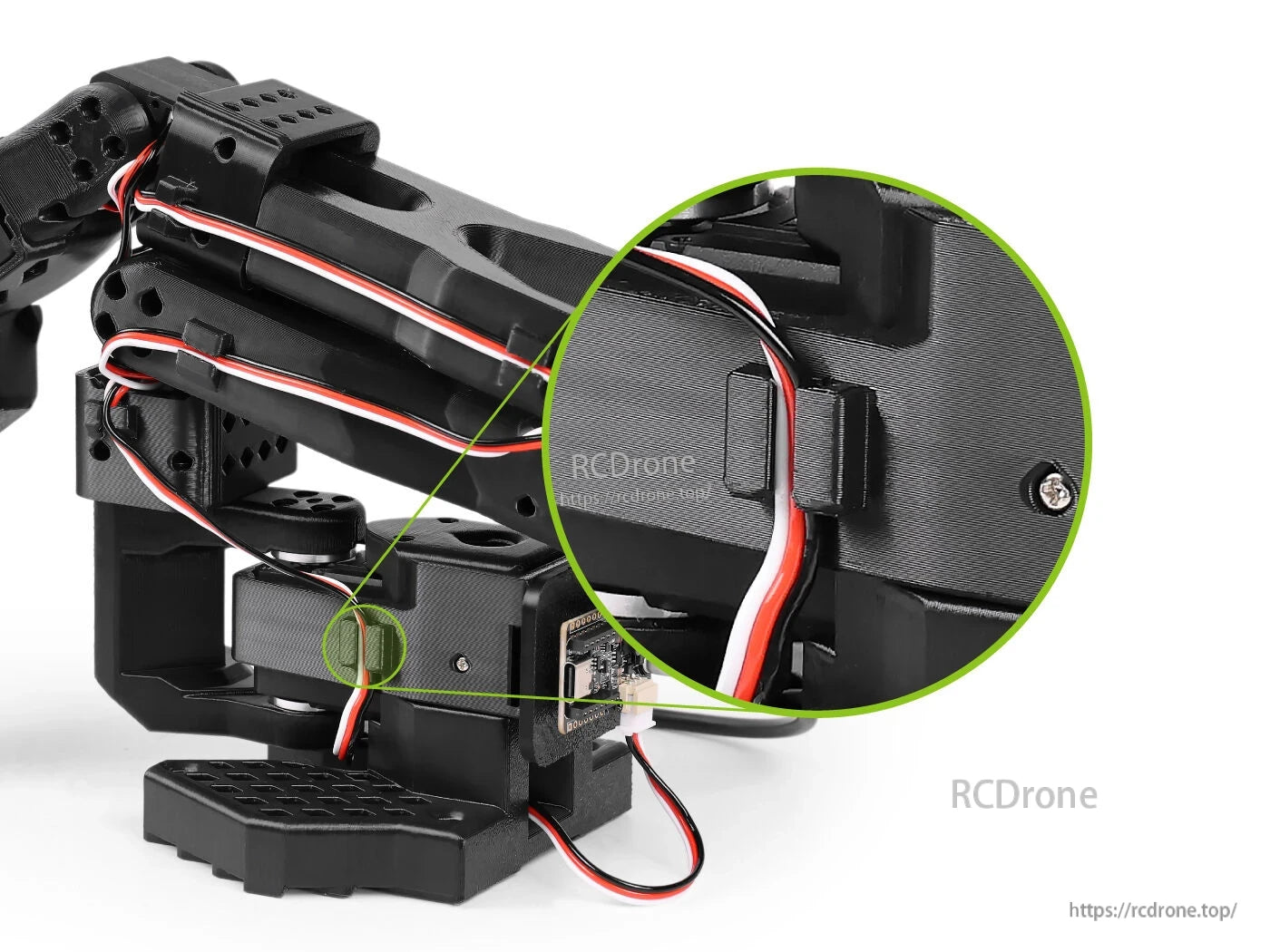
- تحسين الأسلاك: يقلل من الانفصالات التي لوحظت سابقًا عند المفصل 3 ويزيل حدود نطاق الحركة.
- نسب تروس ذراع القائد المحسّنة: أداء محسّن دون صناديق تروس خارجية.
- وظيفة جديدة: يمكن لذراع القائد أن تتبع ذراع التابع في الوقت الحقيقي لدعم سياسات التعلم المعزز والتدخل البشري. html
أبرز ميزات سلسلة SO-ARM10x
- حل مفتوح المصدر ومنخفض التكلفة من TheRobotStudio.
- التكامل مع منصة LeRobot (مجموعات بيانات وأدوات ونماذج قائمة على PyTorch للتعلم بالتقليد والتعلم المعزز).
- موارد شاملة: دليل التجميع والمعايرة والاختبار وجمع البيانات والتدريب والنشر.
- متوافق مع Nvidia reComputer Mini J4012 Orin NX 16 GB.
- أذرع روبوتية بزاوية 6 (رئيسية وتابعة) موضحة في مواد المجموعة.
المواصفات
| النوع | مجموعة الذراع SO-ARM101 Pro |
| محركات الذراع الرئيسية (7.4V) | نسبة التروس 1× 1:345 (المفصل رقم 2)؛ 2× 1:191 (المفصل رقم 1 &والمفصل رقم 3)؛ 3× 1:147 (المفصل رقم 4، رقم 5 &والمقبض رقم 6) |
| الذراع التابعة | نفس مجموعة SO-ARM100 Pro |
| مزود الطاقة (DC 5.5mm*2. 1mm) | 12V2A لذراع المتابعة؛ 5V4A لذراع القيادة |
| مستشعر الزاوية | م encoder مغناطيسي بدقة 12 بت |
| درجة حرارة التشغيل الموصى بها | 0℃~40℃ |
| طريقة الاتصال | UART |
| طريقة التحكم | PC |
مقارنة
|
SO-ARM10x بتكلفة منخفضة مجموعة الذراع الذكية AI ومجموعة الذراع برو |
||||
|
النوع |
SO-ARM100 |
SO-ARM101 |
||
|
مجموعة الذراع |
مجموعة الذراع برو |
طقم الأذرع |
طقم الأذرع برو |
|
|
ذراع القائد |
12x (7.4V) محركات نسبة التروس 1:345 لجميع المفاصل |
12x (12V) محركات نسبة التروس 1:345 لجميع المفاصل |
1x (7.4V) محرك نسبة التروس 1:345 للمفصل رقم 2 |
|
|
2x (7.4V) محركات نسبة التروس 1:191 للمفصلين رقم 1 ورقم 3 |
||||
|
3x (7.4V) محركات نسبة التروس 1:147 للمفاصل رقم 4 ورقم 5 ومقبض رقم 6 |
||||
|
ذراع المتابعة |
نفس SO-ARM100 |
نفس SO-ARM100 Pro |
||
|
مزود الطاقة |
5.5mm*2.1mm DC 5V4A |
5.5mm*2.1 مم DC 12 فولت2أمبير |
5.5 مم * 2.1 مم DC 5 فولت 4 أمبير |
5.5 مم * 2.1 مم DC 12 فولت 2 أمبير للذراع المتابعة |
|
5.5 مم * 2.1mm DC 5V4A لمحرك الذراع |
||||
|
مستشعر الزاوية |
مشفّر مغناطيسي بدقة 12 بت |
|||
|
نطاق درجة الحرارة الموصى به درجة الحرارة |
0℃~40℃ |
|||
|
طريقة الاتصال |
UART |
|||
|
طريقة التحكم |
PC |
|||
ما هو المضمن
- محرك سيرفو STS3215 بجهد 7.4 فولت نسبة تروس 1:345 ×1
- محرك سيرفو STS3215 بجهد 7.4 فولت نسبة تروس 1:191 ×2
- 7.4v محرك سيرفو STS3215 نسبة التروس 1:145 ×3
- 12v محرك سيرفو STS3215 نسبة التروس 1:345 ×6
- لوحة محول سيرفو لاستوديو Seeed XIAO ×2
- دبوس ×8
- برغي ×8
- كابل إمداد طاقة 5V (رأس متعدد) × 1
- كابل إمداد طاقة 12V (رأس متعدد) ×1
- كابل USB-C ×2
- كابل DC Power Pigtail ×2
التطبيقات
- التعلم التقليدي والتعلم المعزز مع LeRobot: خطوط أنابيب شاملة لجمع البيانات، التدريب، المحاكاة، والنشر.
- نشر Nvidia Jetson على الحافة: تدريب فعال لمهام الإمساك والنقل المخصصة مع reComputer J4012 Orin NX 16 GB.
التفاصيل

مجموعة ذراع روبوتية 6 محاور مع أجهزة مفتوحة المصدر، متوافقة مع reComputer Mini J4012 Orin NX 16GB.يدعم LeRobot على Hugging Face موارد المجتمع وتعزيز التعلم المعزز، مما يمكّن التنسيق بين الجسم بالكامل. يسهل جمع البيانات والمحاكاة والتدريب. توفر رموز QR الوصول إلى GitHub وWiki وملفات الطباعة ثلاثية الأبعاد للهيكل العظمي.

مجموعة تطوير NVIDIA Jetson Orin NX مع أذرع الروبوت reComputer J40 و SO-ARM101، تعرض إحصائيات النظام واستخدام GPU على الشاشة.
Related Collections