



محرك SteadyWin DD4015 بجهد 24 فولت RS485/CAN مع مشفر مطلق 14 بت 0.25 N.M 125 دورة/دقيقة 114 جم -20~80℃
محرك SteadyWin DD4015 بجهد 24 فولت RS485/CAN مع مشفر مطلق 14 بت 0.25 N.M 125 دورة/دقيقة 114 جم -20~80℃
SteadyWin
سعر عادي
$152.00 USD
سعر عادي
سعر البيع
$152.00 USD
سعر الوحدة
per
Taxes included.
الشحن محسوب عند السداد.
تعذر تحميل توفر الالتقاط
نظرة عامة
محرك SteadyWin DD4015 هو محرك مدمج مع اتصال RS485 / CAN ومشفر مطلق بدورة واحدة (14 بت). يتم تحديده للعمل عند جهد اسمي 24 فولت (نطاق 10~28 فولت) وهو مناسب لتشغيل الروبوتات حيث يتطلب الأمر تغذية راجعة لموقع الحلقة المغلقة.
الميزات الرئيسية
- الاتصال: RS485 / CAN
- المشفر: مطلق بدورة واحدة، دقة 14 بت
- عزم الدوران الاسمي: 0.25 N.M; عزم الدوران الأقصى: 0.35 N.m
- السرعة الاسمية: 125 دورة في الدقيقة؛ السرعة القصوى بدون حمل: 1013 دورة في الدقيقة
المواصفات الفنية
| المعلمة | القيمة |
|---|---|
| الجهد الاسمي | 24 فولت |
| نطاق الجهد | 10~28 فولت |
| التيار الاسمي | 1.2A |
| الطاقة الاسمية | 28.8 واط |
| عزم الدوران الاسمي | 0.25N.M |
| السرعة الاسمية | 125 دورة في الدقيقة |
| السرعة القصوى بدون تحميل | 1013 دورة في الدقيقة |
| عزم الدوران الأقصى | 0.35 N.m |
| التيار الأقصى | 1.85A |
| ثابت السرعة | 42.21 دورة في الدقيقة/فولت |
| ثابت العزم | 0.17N.M/A |
| عدد أزواج الأقطاب | 11 زوج |
| مقاومة الطور | 12.57Ω |
| محاثة الطور | 2.48Mh |
| الاتصال | RS485 / CAN |
| نوع المشفر | دوران واحد مطلق |
| الدقة | 14بت |
| وزن المحرك | 114غ |
| درجة حرارة العمل | -20~80℃ |
الميكانيكية / التركيب (من الرسم)
- علامة الطراز: DD4015
- القطر الخارجي: Ø40 ±0.1
- الطول الكلي: 33 ±0.1
- طول الأجزاء: 12.4 و 20.1
- قطر العمود: Ø5
- نمط الجانب الأمامي: Ø20; 4-M3 (عمق ▽3); Ø13.6 (+0.05/0) (عمق ▽2); Ø12.6 (+0.1/0) (عمق ▽12)
- نمط الجانب الخلفي: Ø33; 4-M3 (عمق ▽4.5)
- موصل: SH1.0-8PIN
- SH1.0-8PIN الإشارات: 485_A، 485_B، CAN_H، CAN_L، GND، GND، VCC، VCC
سيناريوهات التطبيق
- الروبوتات البشرية
- الأذرع الروبوتية
- الهياكل الخارجية
- الروبوتات رباعية الأرجل
- مركبات AGV
- روبوتات ARU
المستندات
للمساعدة في التوصيل أو الدمج أو الطلب، اتصل بـ [email protected] or زيارة https://rcdrone.top/.
التفاصيل
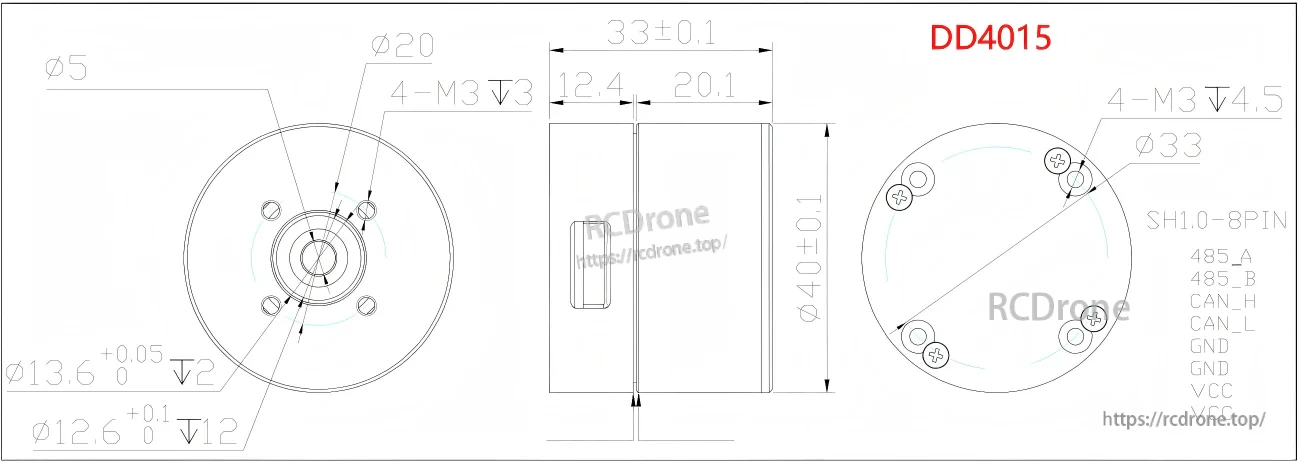
الأبعاد الميكانيكية وأنماط ثقوب التثبيت لـ DD4015، بالإضافة إلى مخطط دبابيس موصل SH1.0 8‑pin لتوصيلات RS485 و CAN.
Related Collections



