STM32 طقم كوادكوبتر مفتوح المصدر يمكنك صنعه بنفسك - لوح تعلم الطالب للتدفق البصري بالليزر PCB + رف تصحيح معلمات PID
STM32 طقم كوادكوبتر مفتوح المصدر يمكنك صنعه بنفسك - لوح تعلم الطالب للتدفق البصري بالليزر PCB + رف تصحيح معلمات PID
RCDrone
تعذر تحميل توفر الالتقاط
ملخص
ال STM32 اصنعها بنفسك مجموعة طائرات رباعية المراوح مفتوحة المصدر هو حل شامل للطلاب والهواة والمطورين الذين يريدون اكتساب خبرة عملية في برمجة الطائرات بدون طيار, ديناميكيات الطيران، وتطوير الأجهزة. يضم متحكم STM32F103C8T6, جيروسكوب MPU6050 بستة محاور، و وحدة لاسلكية NRF24L01تم تجهيز هذه الطائرة الرباعية المراوح بتقنيات متطورة لرحلة سلسة ومستقرة. تثبيت التدفق البصري مُدمج مع أجهزة استشعار الضغط الجوي يضمن تثبيت الارتفاع بدقة وقفل الموضع، بينما البرامج الثابتة مفتوحة المصدر للغة C يسمح للمستخدمين بتعديل خوارزميات الطيران. مع منافذ الإدخال والإخراج القابلة للتخصيص, ضبط معلمات PID اللاسلكية، والدعم ل التطوير الثانوي باستخدام Keil MDK5، توفر هذه الطائرة الرباعية المروحية تنوعًا لا مثيل له لكل من المستخدمين المبتدئين والمتقدمين. بطارية 3.7 فولت 1200 مللي أمبير يضمن ما يصل إلى 10 دقائق من وقت الطيران، وخفيف الوزن إطار 320 مم × 230 مم تم تصميمه لتحقيق الاستقرار وسهولة الحمل. يعمل رف تصحيح أخطاء PID المتضمن على تعزيز تجربة التعلم بشكل أكبر، مما يجعل هذه المجموعة مثالية للمشاريع التعليمية والمسابقات وعشاق الطائرات بدون طيار.
الميزات الرئيسية
-
دقة التحكم في الطيران:
- مجهزة بـ متحكم STM32F103C8T6 و جيروسكوب MPU6050 للحصول على ديناميكيات طيران موثوقة.
- وحدة التدفق البصري (PM)W3901) و مستشعر الضغط الجوي (SPL06-001) تمكين تثبيت الموضع الدقيق وتثبيت الارتفاع (20 سم - 400 سم).
-
المصدر المفتوح وقابلية البرمجة:
- البرامج الثابتة مفتوحة المصدر بالكامل المكتوبة بلغة المعيار ج لتسهيل التطوير الثانوي.
- متوافق مع كيل MDK5 بيئة لمشاريع البرمجة المتقدمة.
-
التحكم اللاسلكي:
- يتميز بـ وحدة لاسلكية NRF24L01 دعم مسافة التحكم 50م+ في البيئات المفتوحة.
- لاسلكي ضبط معلمة PID بالنسبة للمحاور X وY وZ، يسهل تحسين الطيران.
-
تصميم الأجهزة القوية:
- إطار متين مع محركات 8520 ذات الفرشاة و مراوح 13.5 سم لرحلات داخلية وخارجية مستقرة.
- تصميم خفيف الوزن (100 جرام بما في ذلك البطارية) يدعم الحمولات التي تصل إلى 60 جراممما يجعلها مناسبة لإضافة أجهزة استشعار أو كاميرات.
-
أدوات التعلم المحسّنة:
- يتضمن رف تصحيح أخطاء PID لضبط معلمات PID بشكل دقيق.
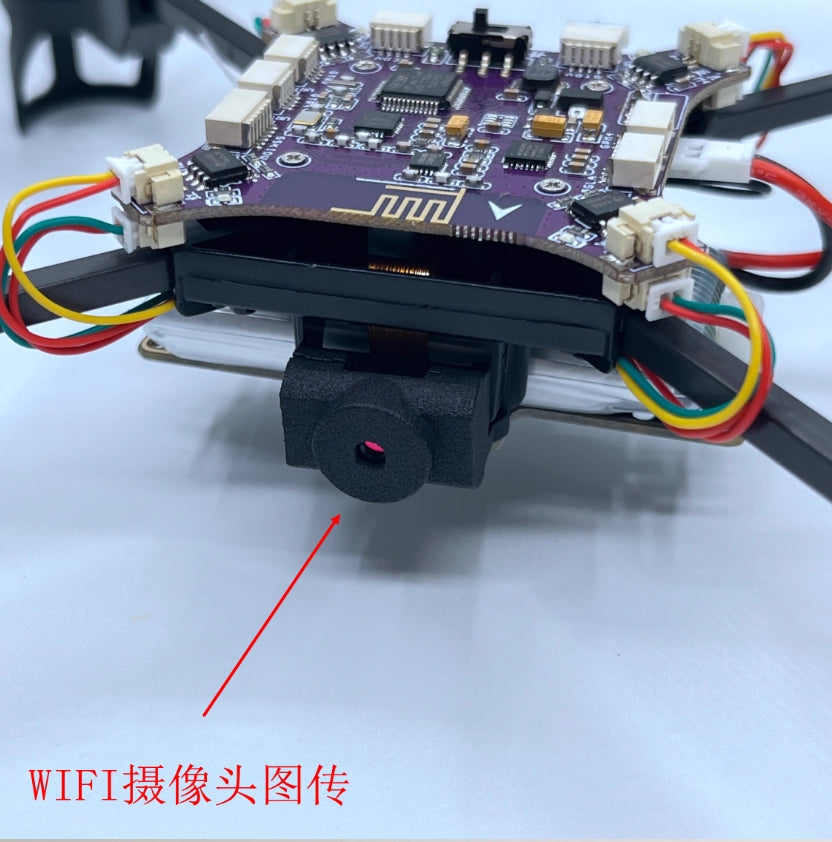
- تدعم منافذ الإدخال والإخراج الملحومة مسبقًا ملحقات مثل واجهات كاميرا Wi-Fi, إس بي آي, يو آر تي، و وحدات IIC.
-
نظام بطارية قوي:
- يشمل 3.7 فولت 380 مللي أمبير و بطاريات 3.7 فولت 1200 مللي أمبير، تقدم أوقات الرحلات 5 الى 10 دقائق اعتمادا على الحمولة والظروف.
- تضمن الحماية المدمجة ضد الشحن الزائد والتفريغ سلامة البطارية.
-
التوصيل والتشغيل:
- اتصال USB HID لـ نقل البيانات في الوقت الحقيقي وضبط المعلمات عبر واجهة الكمبيوتر.
- واجهة برمجة SWD سهلة الاستخدام تدعم كلاً من جيه لينك و إس تي لينك مصحح الأخطاء.
المواصفات الفنية
طائرة رباعية المراوح
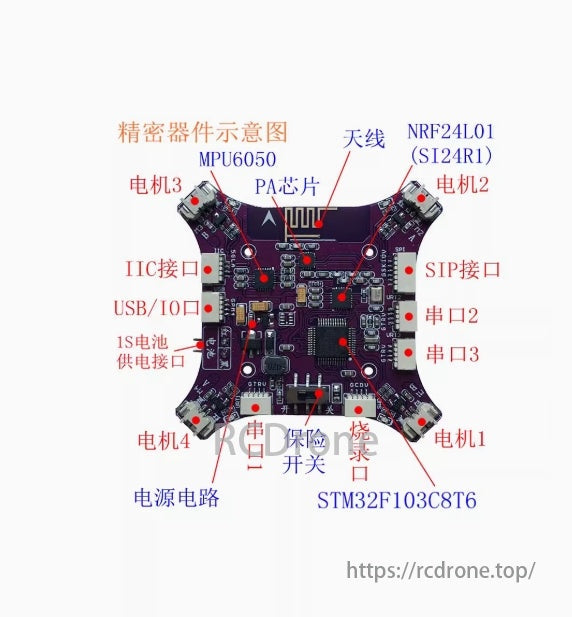
- الشريحة الرئيسية: STM32F103C8T6
- جيروسكوب: MPU6050 (6 محاور)
- الوحدة اللاسلكية: NRF24L01 (SI24R1)
- سائق المحرك: AO3400 (A09T)
- المحركات: محركات 8520 ذات الفرشاة
- المراوح: 13.5 سم (4 متضمنة)
- أجهزة الاستشعار: SPL06-001 (باروميتر)، PMW3901 (التدفق البصري)
- بطارية: 3.7 فولت 1200 مللي أمبير في الساعة (مدة طيران 10 دقائق) + 3.7 فولت 380 مللي أمبير في الساعة (مدة طيران 5 دقائق)
- وزن: 100 جرام (بما في ذلك البطارية)
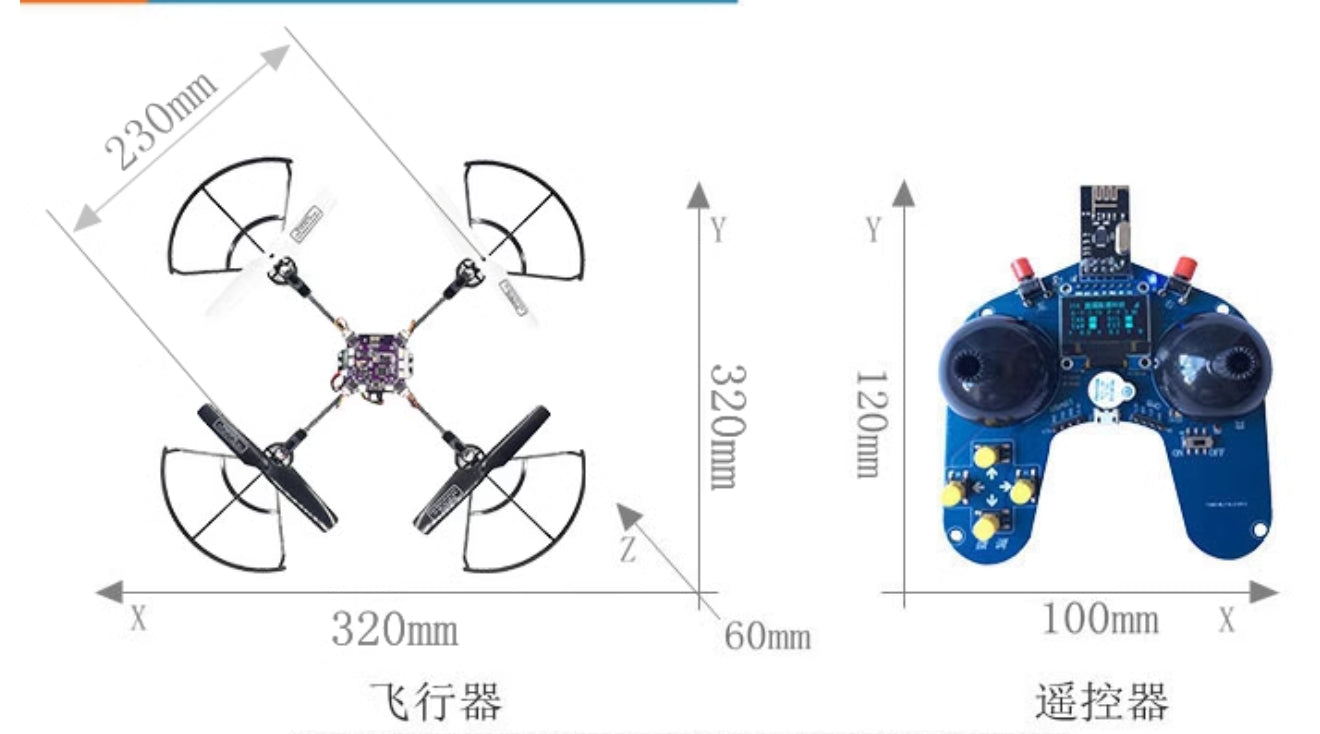
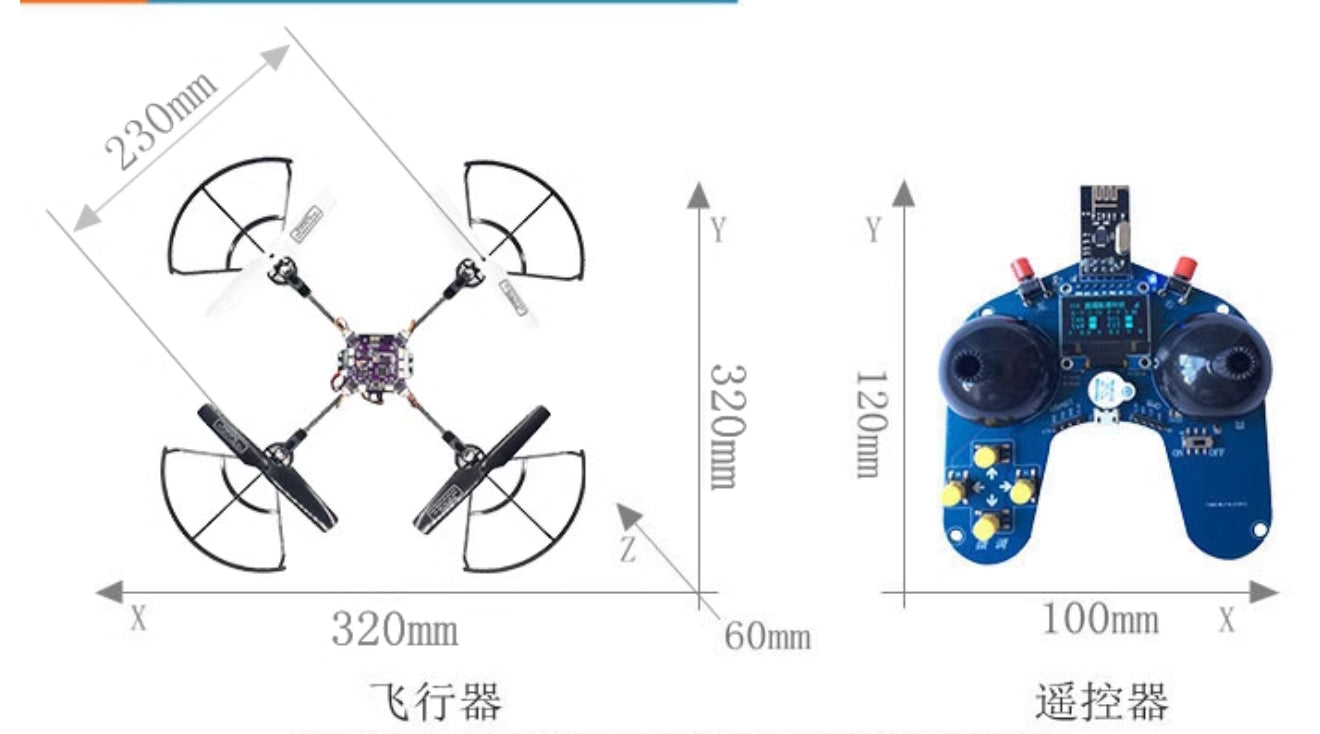
- حجم الإطار: 320 مم × 230 مم
- المنافذ الإضافية: SPI x1، UART x2، IIC x1، USB IO x1
- سعة الحمولة: 60 جرام
جهاز التحكم عن بعد
- الشريحة الرئيسية: STM32F103C8T6
- الوحدة اللاسلكية: NRF24L01 (SI24R1)
- عرض: شاشة OLED مقاس 0.96 بوصة
- قوة: بطارية 3.7 فولت 380 مللي أمبير
- مسافة التحكم: >50م (حقل مفتوح)
- مقاس: 12سم × 10سم
- وزن: 60 جرام
- الميزات الإضافية: أزرار المعايرة، واجهة ضبط PID مرئية
محتويات الحزمة
- إطار طائرة رباعية المراوح مع إلكترونيات مجمعة مسبقًا (وحدة تحكم الطيران المستندة إلى STM32F103C8T6، MPU6050، SPL06-001، PM)W3901).
- جهاز التحكم عن بعد اللاسلكي STM32 (مع شاشة OLED ووحدة NRF24L01).
- البطاريات:
- بطارية ليثيوم 3.7 فولت 1200 مللي أمبير في الساعة × 1 (مدة طيران 10 دقائق)
- بطارية ليثيوم 3.7 فولت 380 مللي أمبير في الساعة × 1 (مدة طيران 5 دقائق)
- مراوح احتياطية (4 قطع)
- كابل شحن USB (متوافق مع 3.7 فولت - 4.2 فولت)
- أسلاك التوصيل (متنوعة)
- مفك براغي دقيق
- رف تصحيح أخطاء PID
- دليل المستخدم الشامل والبرامج التعليمية (PDF والفيديو).
ميزات إضافية مميزة
- وضع المكونات بدقة: يتم وضع علامة على كل جزء ملحوم، بما في ذلك المنافذ الخاصة بالطاقة، وموصلات SPI، وIIC، وUSB، والمحرك.
- أدوات التصحيح المعيارية: يضمن وضع تدفق الضوء ومستشعر الضغط الجوي دقة بيانات الرحلة لضبط PID.
- ملحقات لوحة التطوير: يسمح بدمج الكاميرات وأجهزة الاستشعار للتصوير الجوي وتسجيل الفيديو.
- الواجهة المرئية: يتم عرض بيانات الطائرة الرباعية المراوح في الوقت الفعلي عبر برنامج الكمبيوتر الشخصي لأغراض التصحيح والتحسين.
التطبيقات:
- الاستخدام التعليمي: مثالي لمشاريع التعلم في مجالات العلوم والتكنولوجيا والهندسة والرياضيات ودورات الهندسة.
- المسابقات: مثالي ل طائرة بدون طيار DIY التحديات ومسابقات الروبوتات.
- الهواة: مشروع جذاب لمحبي التكنولوجيا وصناعها.
- التطوير المتقدم: يدعم التطوير الثانوي للتطبيقات المخصصة.
إشعار السلامة:
تأكد من ظروف الاختبار الآمنة باستخدام رف التصحيح المرفق. تجنب الطيران في المناطق المزدحمة أو الخطرة. اتبع تعليمات التجميع وتعامل مع المكونات الملحومة بعناية.
بفضل تصميمها المعياري ومرونتها مفتوحة المصدر وموارد التعلم الشاملة، فإن مجموعة STM32 DIY Open Source Quadcopter Kit هي بوابتك لإتقان تكنولوجيا الطائرات بدون طيار وبرمجتها.




هذه مجموعة لوحة PCB لأنظمة التلفزيون مع شريحة STM3ZF103C8T6F، مصممة لنقل واستقبال الفيديو عالي الجودة.


OnF STM32F Blue Pill، 7% i: STM32 High Frequency BRB+، 10 Ohm x 7 HhJfV: جهاز تحكم عن بعد STM32. الشاشة: OLED مقاس 0.96 بوصة IM Et: 2.4C IMHM: ~20°C إلى ~60°C JE+HFZ: >50x (Watt)، EFt) 7ARh: 12cm x 6cm InLaR: 3.7V، 380mAh، الوزن: 60 جرام