SU17 Research Drone - PX4 تطوير الطائرات بدون طيار الصناعية مفتوحة المصدر مع MID-360 LiDAR، كاميرا رباعية SLAM، EGO-Swarm
SU17 Research Drone - PX4 تطوير الطائرات بدون طيار الصناعية مفتوحة المصدر مع MID-360 LiDAR، كاميرا رباعية SLAM، EGO-Swarm
RCDrone
تعذر تحميل توفر الالتقاط
ملخص
طائرة SU17 Research Drone هي طائرة رباعية المراوح عالية الأداء تتميز بـ بطارية 6000 مللي أمبير, ليدار MID-360 للرسم الخرائطي ثلاثي الأبعاد، نظام SLAM رباعي الكاميرات لتحديد المواقع بدقة، والتكامل تحديد المواقع GPS+GLONASS. مع وزن إقلاع يبلغ 2.3 كجم و أ قدرة الحمولة 200 جرام، فهو يقدم 21 دقيقة من زمن الرحلة في وضع تحديد المواقع المرئية. مدعوم ببرنامج Prometheus، فهو يدعم التعرف على الهدف وتخطيط المسار والملاحة المستقلة، مما يجعله درجة الصناعة الحلول للبحث والابتكار.
معلمات الأجهزة
الطائرات
| المعلمة | وصف |
|---|---|
| نوع الطائرة | طائرة رباعية المراوح |
| وزن الإقلاع (تقريبًا) | 2.3 كجم (مع غطاء حماية وبطارية) |
| المسافة القطرية | 320 ملم |
| أبعاد | الطول: 442 ملم، العرض: 388 ملم، الارتفاع: 174 ملم (باستثناء الغطاء الواقي) |
| الحمولة القصوى | 200 جرام |
| وقت الطيران المحلّق | حوالي 13 دقيقة (مع التحويم عند 100%، وليس أقل من 0%)، التموضع البصري: 21 دقيقة |
| دقة التحويم | نظام تحديد المواقع العالمي (GPS): عمودي ±1.5 متر، أفقي ±2.0 متر |
| 3D LiDAR SLAM: عمودي ±0.08 متر، أفقي ±0.08 متر | |
| 4 كاميرات بصرية SLAM: عمودي ±0.05 متر، أفقي ±0.05 متر | |
| مستوى مقاومة الرياح | المستوى الرابع |
| درجة حرارة التشغيل | -10 درجة مئوية إلى 40 درجة مئوية |
| شريحة MCU الرئيسية | STM32H743 |
| وحدة قياس القصور الذاتي | ICM42688/مؤشر كتلة الجسم 088 |
| البارومتر | رقم MS5611 |
| بوصلة | كيو ام سي 5883ل |
| الواجهة | يو إس بي من النوع سي |
كمبيوتر على متن الطائرة
| المعلمة | وصف |
|---|---|
| المعالج | إنتل كور i5-8365U |
| سعة الذاكرة | 8 جيجا بايت |
| تردد الذاكرة | LPDDR3@2133MHz |
| تخزين | قرص SSD NVMe بسعة 256 جيجابايت |
| منفذ الشبكة | بايدو أبولو إيثرنت X2، 12V@3A poweمزود الطاقة، يدعم IEEE 1588-2008 (PTP v2) |
| المنفذ التسلسلي | منفذ تسلسلي TTL X2، 5 فولت/3.3V@500mA poweالعرض ر |
| USB | منفذ Type-C X2 (1x USB2.0، 1x USB3.0) |
| منفذ HDMI | اتش دي ام اي 1.4 |
بطارية الطاقة
| المعلمة | وصف |
|---|---|
| نموذج | SU17-L |
| نوع البطارية | بطارية ليثيوم بوليمر عالية الضغط |
| الجهد المقدر | 26.4 فولت (الحد الأقصى)، 21 فولت (الحد الأدنى) |
| جهد التخزين | 22.8 فولت (نموذجي) |
| القدرة المقدرة | 6000 مللي أمبير |
| وزن | 680 جرام |
| أبعاد | الطول: 85.2 ملم، العرض: 86.5 مم، الارتفاع: 135 مم |
جهاز التحكم عن بعد
| المعلمة | وصف |
|---|---|
| نموذج | التيسير الكمي الثاني |
| القنوات | 8 |
| قوة النقل | 18~20 ديسيبل |
| وزن | 294.1 جرام |
جيمبال
| المعلمة | وصف |
|---|---|
| زاوية قابلة للتحكم | -90° ~ 30° (محور الإمالة) |
| بروتوكول البث | RTSP (القياسي) |
| تنسيق الترميز | ح.264 |
| دقة | 1080 بكسل بمعدل 25 إطارًا في الثانية |
| مجال الرؤية القطري (D) | 120 درجة |
| مجال الرؤية الرأسي (V) | 54 درجة |
| مجال الرؤية الأفقي (H) | 95 درجة |
نقل الصورة
| المعلمة | وصف |
|---|---|
| تردد التشغيل | 2.4 جيجا هرتز |
| قوة النقل | 18 ديسيبل ميلي واط |
| نطاق الاتصالات | 3 كم (لا تداخل ولا عوائق) |
| نطاق الصورة | 1 كم (أدنى حد من التدخل، لا يوجد عائق) |
| الحد الأقصى للنطاق الترددي | 40 ميجابايت في الثانية |
كاميرا رباعية العمق
| المعلمة | وصف |
|---|---|
| مُسرِّع الرؤية | وحدة معالجة الفيديو Intel Movidius Myriad X |
| الدقة القصوى | 1296 × 816 |
| الحد الأقصى لمعدل الإطارات | 1280×800 بمعدل 120 إطارًا في الثانية |
| نوع الغالق | مصراع عالمي |
| تنسيق الترميز | دفق واحد 8/10 بت |
| مجال الرؤية | مجال رؤية قطري 150 درجة، مجال رؤية أفقي 127.4 درجة، مجال رؤية رأسي 79.7 درجة |
| عدد أجهزة الاستشعار | 4 (2 أمامي + 2 خلفي) |
| وحدة قياس القصور الذاتي | مؤشر كتلة الجسم 270 |
نظام الملاحة العالمي عبر الأقمار الصناعية
| المعلمة | وصف |
|---|---|
| الدقة الأفقية | 1.5 متر CEP (مع SBAS) |
| دقة السرعة | 0.05 متر/ثانية |
| وضع التشغيل | نظام تحديد المواقع العالمي (GPS) + نظام جلوناس (GLONASS) + نظام بي دي إس (BDS) + نظام جاليليو (GALILEO) + نظام إس بي إيه إس (SBAS) + نظام إس إس زيرو سات (QZSS) |
شاحن
| المعلمة | وصف |
|---|---|
| نموذج | ل ك 150-2640500 |
| جهد الدخل المتردد | 100 فولت ~ 240 فولت |
| جهد الدخل المستمر | 26.4 فولت |
| وزن | 460 جرام |
| تيار الشحن | 5أ |
ليدار ثلاثي الأبعاد
| المعلمة | وصف |
|---|---|
| نموذج | منتصف 360 |
| طول موجة الليزر | 905 نانومتر |
| نطاق القياس | 40 متر عند 10% انعكاسية |
| مجال الرؤية | أفقي 360 درجة، عمودي -7 درجة ~ 52 درجة |
| الحد الأدنى للمدى | 0.1 متر |
| تردد النقطة | 10 هرتز (نموذجي) |
| نقطة الإخراج | 200000 نقطة/ثانية |
| واجهة البيانات | 100 قاعدة-تي إكس إيثرنت |
| مزامنة البيانات | IEEE 1588-2008 (PTP v2)، نظام تحديد المواقع العالمي (GPS) |
| وحدة قياس القصور الذاتي المدمجة | اي سي ام 40609 |
| جهد مصدر الطاقة | 7~27 فولت |
| أبعاد | 65 مم (عرض) × 65 مم (عمق) × 60 مم (ارتفاع) |
| وزن | 115 جرام |
| درجة حرارة التشغيل | -20 درجة مئوية ~ 55 درجة مئوية |
معلمات البرنامج
كمبيوتر على متن الطائرة
| المعلمة | وصف |
|---|---|
| نموذج | إنتل كور i5-8365U |
| نظام | أوبونتو 20.04 |
| اسم المستخدم | أموف |
| كلمة المرور | أموف |
| روس | عقلي |
| أوبن سي في | 4.7.0 |
| نظام تحديد المواقع البصرية | BSA_SLAM الإصدار 1 |
برنامج بروميثيوس
| المعلمة | وصف |
|---|---|
| إصدار | الإصدار 2.0 |
| نظام PrometheusGroundStation | v1.24.11.27 (الإصدار النهائي بناءً على سجل إصدار Wiki) |
تفاصيل
طبعة البحث SU17
طائرة بدون طيار بحثية ذات جودة صناعية
- اختياري 3D LiDAR:يتيح رسم الخرائط وتحديد المواقع وتجنب عوائق الملاحة.
- برنامج بروميثيوس للطائرات بدون طيار ذاتية القيادة:غني بالعروض التوضيحية لإتقان التحكم في الطائرات بدون طيار بسرعة.
- منصة طيران ذات جودة صناعية:مستقرة ومفتوحة، مما يضع معيارًا جديدًا لأداء الطائرات بدون طيار البحثية.

الميزات الرئيسية
البحث SU17 منصة تطوير الطائرات بدون طيار (المشار إليها باسم SU17) تعتمد على تصميم متكامل، يشتمل على وحدات تحكم في الطيران، وأجهزة كمبيوتر على متن الطائرة، ووحدات SLAM رباعية الكاميرات، وكاميرات سحابية، ووحدات نقل الصور لتحقيق تكامل عالي المستوى، مما يعزز بشكل كبير استقرار الأجهزة وموثوقيتها. مزودة ببرنامج Prometheus للطائرات بدون طيار ذاتية القيادة، تدعم SU17 ميزات مثل التعرف على الهدف والتتبع وتخطيط المسار لمختلف سيناريوهات التحكم في الطيران.
يدمج بشكل اختياري تقنية MID-360 3D LiDAR، جنبًا إلى جنب مع خوارزمية FAST-LIO لتحقيق 3D LiDAR SLAM، مما يوفر معلومات دقيقة عن الاستشعار البيئي وتحديد المواقع. عند إقرانه بخوارزمية تخطيط المسار EGO-Swarm، فإنه يتيح رسم خرائط ثلاثية الأبعاد في الوقت الفعلي وتجنب العوائق في البيئات المعقدة.




نظام برمجي Prometheus V2
تم بناء منصة التطوير على إطار عمل مفتوح المصدر ROS وPrometheus، مما يوفر وظائف غنية وواجهات برمجة تطبيقات تطوير ثانوية واسعة النطاق لإعادة البرمجة بكفاءة. كما توفر إمكانية الوصول إلى معلومات تحديد المواقع وأوضاع الطيران وحالة البطارية وبيانات IMU وواجهات بيانات حالة الطائرة بدون طيار وأجهزة الاستشعار الأخرى، إلى جانب واجهات التحكم في الموقع والسرعة والتسارع والموقف.
بالإضافة إلى ذلك، يتضمن أمثلة استخدام لواجهات برمجة التطبيقات ذات الصلة. علاوة على ذلك، تتميز الطائرة بدون طيار بوظائف فحص السلامة لعمليات الطيران (الحماية من الاصطدام)، مما يتيح الهبوط التلقائي في ظل ظروف غير طبيعية، مما يقلل من خطر الاصطدام ويضمن عملية تطوير أكثر أمانًا.

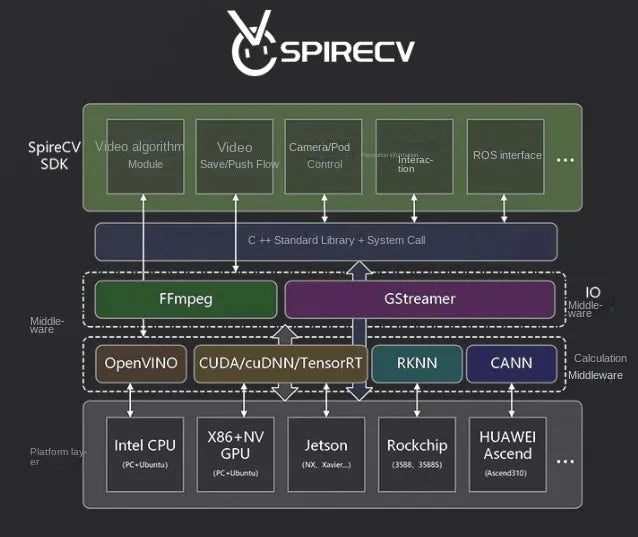
مكتبة رؤية SpireCV
مكتبة SpireCV Vision عبارة عن مجموعة أدوات تطوير برمجيات لمعالجة الصور في الوقت الفعلي مصممة خصيصًا لأنظمة الطائرات بدون طيار الذكية. وهي توفر وظائف مثل التحكم في المحور والكاميرا وتخزين الفيديو وبثه واكتشاف الهدف والتعرف عليه وتتبعه.
تهدف مجموعة أدوات تطوير البرمجيات هذه إلى تقديم أداء عالٍ وموثوقية وواجهة مبسطة لمطوري أنظمة الطائرات بدون طيار الذكية. وبفضل حل المعالجة المرئية الغني بالميزات، فإنها تمكن المطورين من تنفيذ تطبيقات معقدة مختلفة تعتمد على الرؤية بكفاءة.
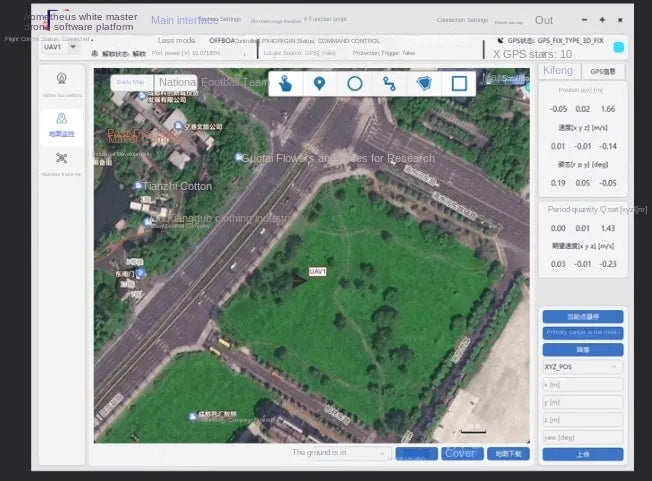
محطة بروميثيوس الأرضية
محطة بروميثيوس الأرضية هي واجهة تفاعل بين الإنسان والطائرة بدون طيار تم تطويرها بناءً على نظام بروميثيوس، وتم بناؤها باستخدام تقنية Qt. وهي تتيح تكرارًا سريعًا لوظائف نظام بروميثيوس، مما يوفر مراقبة في الوقت الفعلي وتصورًا ثلاثي الأبعاد لحالة الطائرة بدون طيار وبيانات التحكم.
من خلال المحطة الأرضية، يمكن للمستخدمين تنفيذ أوامر مثل الإقلاع بنقرة واحدة، والتحليق فوق الموضع الحالي، والهبوط، والتحكم في الموضع. بالإضافة إلى ذلك، يدعم النظام أزرار الوظائف المخصصة لبدء تشغيل البرامج النصية المحددة للمستخدم أو إرسال رسائل مخصصة، مما يحسن بشكل كبير من راحة وكفاءة وقابلية التوسع لعمليات المستخدم.
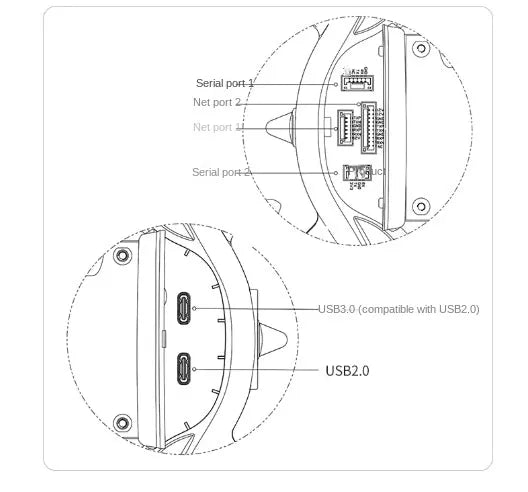
التوسع القوي
منافذ توسيع الأجهزة
-
المنفذ التسلسلي 1
-
المنفذ التسلسلي 2
-
منفذ الشبكة 1
-
منفذ الشبكة 2
-
منافذ USB:
- USB 3.0 (متوافق مع USB 2.0)
- يو اس بي 2.0
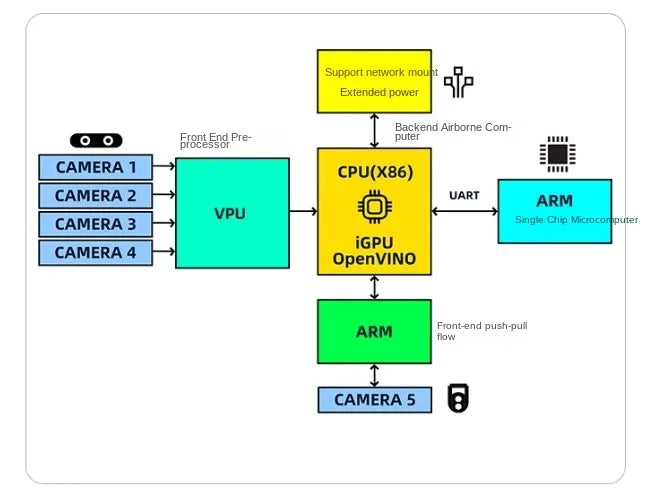
إطار عمل الأجهزة
توضح الصورة بنية الأجهزة الخاصة بطائرة SU17 بدون طيار، مع تسليط الضوء على تكامل المكونات المختلفة لمعالجة البيانات المتقدمة والتحكم في النظام:
-
الكاميرات (الكاميرات 1-4):
متصل بـ وحدة معالجة الرؤية (VPU) للمعالجة المسبقة للواجهة الأمامية. -
وحدة معالجة الفيديو:
يتعامل مع البيانات المرئية من كاميرات متعددة ويرسلها إلى وحدات المعالجة. -
وحدة المعالجة المركزية (X86) مع iGPU وOpenVINO:
يعمل كوحدة حسابية أساسية للمعالجة الخلفية، ويدعم قدرات التوسع المتصلة بالشبكة لتعزيز القدرة الحسابية. -
متحكم ARM أحادي الشريحة:
يتفاعل مع وحدة المعالجة المركزية عبر واجهة UART للحصول على وظائف تحكم إضافية. -
خط الأنابيب الأمامي والكاميرا 5:
يتم إدارتها بواسطة معالج ARM مخصص لتحسين البيانات بشكل أكبر.
يدمج هذا الإطار وحدات معالجة متعددة، ويدعم تحليل الصور في الوقت الفعلي، والمهام الحسابية المتقدمة، والاتصال السلس بين مكونات الأجهزة. ويضمن التعامل بكفاءة مع العمليات المعقدة في تطبيقات البحث والتطوير.
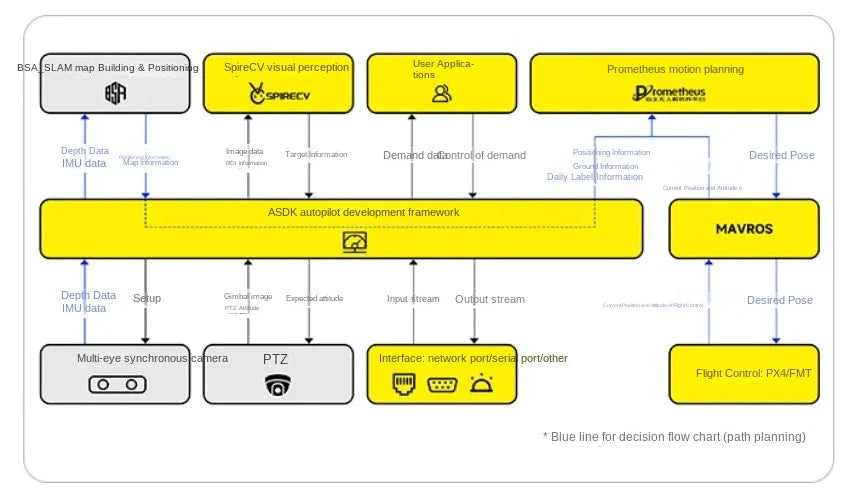
إطار عمل البرمجيات
يوضح الرسم التخطيطي بنية البرنامج لطائرة بدون طيار SU17، مع تسليط الضوء على تكامل الأنظمة المختلفة للوظائف المستقلة:
-
BSA_SLAM (التخطيط والتحديد المحلي):
- توفير بيانات رسم الخرائط المكانية وتحديد المواقع.
- يدمج مدخلات مستشعر العمق ومستشعر IMU للحصول على إدراك دقيق للبيئة.
-
إدراك الرؤية SpireCV:
- معالجة البيانات المرئية، بما في ذلك اكتشاف الكائنات، ومعلومات منطقة الاهتمام، وتتبع الهدف.
-
تطبيقات المستخدم:
- واجهات للمهام التي يديرها المستخدم مثل تصور البيانات وإدخال الأوامر.
-
تخطيط الحركة بروميثيوس:
- يتعامل مع تخطيط المسار باستخدام بيانات الموضع والسرعة والهدف.
-
إطار عمل القيادة الذاتية ASDK:
- يعمل كطبقة معالجة مركزية، لإدارة تدفق البيانات بين أجهزة الاستشعار، والكاميرات، ووحدات السحابة، والواجهات الخارجية.
- يدعم قنوات الإدخال/الإخراج المتعددة (على سبيل المثال، منافذ الشبكة، والمنافذ التسلسلية).
-
مافروس:
- يتواصل مع أنظمة التحكم في الطيران (PX4/FMT) للتحكم في حالة الطيران والموقع.
-
وحدة السحابة وكاميرات المزامنة المتعددة:
- دمج البيانات المستندة إلى السحابة للمعالجة المتقدمة.
- يقوم بمزامنة المدخلات المرئية للعمليات عالية الدقة.
خطوط زرقاء:تمثل مسارات صنع القرار لتخطيط المسار.
يوضح هذا التصميم المعماري تصميمًا معياريًا قابلًا للتوسعة، مما يتيح الاتصال السلس بين مختلف مكونات الأجهزة والبرامج لضمان تشغيل قوي للطائرات بدون طيار.
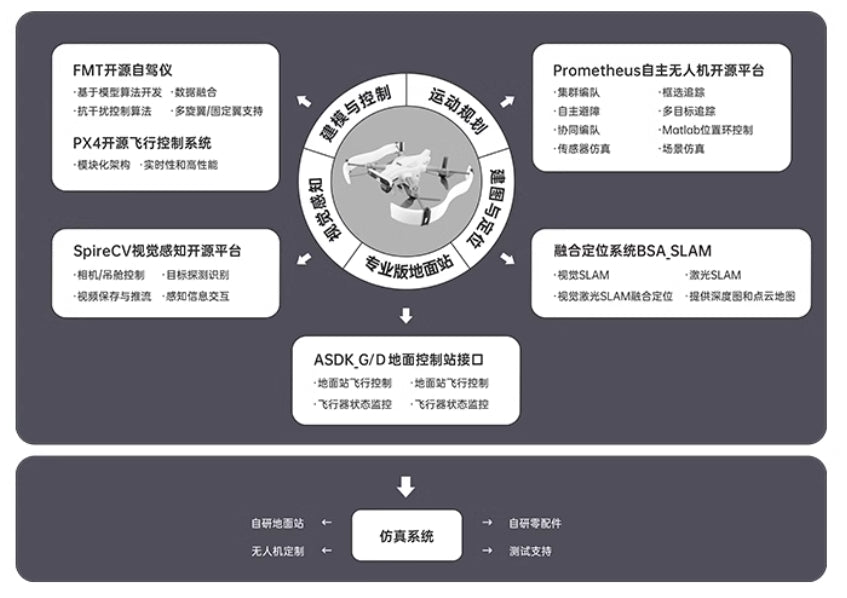
الانفتاح الذكي: حل نظام الطائرات بدون طيار المتكامل
يقدم الرسم التخطيطي بنية شاملة ومفتوحة لأنظمة الطائرات بدون طيار، مع التركيز على الوحدات النمطية والتكامل عبر المكونات المختلفة:
-
المكونات الأساسية:
- برنامج FMT مفتوح المصدر Autopilot:يوفر تحكمًا موثوقًا به في الطيران استنادًا إلى التطوير المعياري، ويدعم البيئات المتنوعة وتكامل البيانات.
- نظام التحكم في الطيران PX4:يضمن الاستقرار ويدعم التخصيص المعياري المتقدم.
- منصة SpireCV Vision Perception:يركز على معالجة الصور، بما في ذلك اكتشاف الكائنات وتتبعها وبث الفيديو في الوقت الفعلي.
-
الأطر الرئيسية:
- منصة بروميثيوس للطائرات بدون طيار ذاتية القيادة:يتضمن التحكم في الطائرات بدون طيار المتعددة، وتخطيط الحركة، والملاحة التعاونية، والمحاكاة في العالم الحقيقي.
- نظام BSA_SLAM:يجمع بين تقنية SLAM المستندة إلى الرؤية وتقنية SLAM المستندة إلى LiDAR لتحديد المواقع ورسم الخرائط بدقة.
- واجهة التحكم في المحطة الأرضية ASDK G/D:يتيح الاتصال السلس بين المحطات الأرضية والطائرات بدون طيار للمراقبة والتعديلات في الوقت الفعلي.
-
تكامل سير العمل:
- يسلط الضوء على العمليات مثل تخطيط الحركة، ورسم خرائط البيئة، والملاحة المستقلة.
- التكامل مع محطات أرضية احترافية للتحكم في المسار وتجنب العوائق وإدارة البيانات في الوقت الفعلي.
-
دعم المحاكاة:
- يتضمن نظام محاكاة لاختبار المهمة المستقلة، والتحكم في الطائرات بدون طيار، والتحقق من المكونات.
يُظهر هذا النظام حلاً متطورًا لتطوير الطائرات بدون طيار المستقلة، مع إمكانيات قابلة للتطوير للبحث والتطبيق والاختبار في سيناريوهات متنوعة.
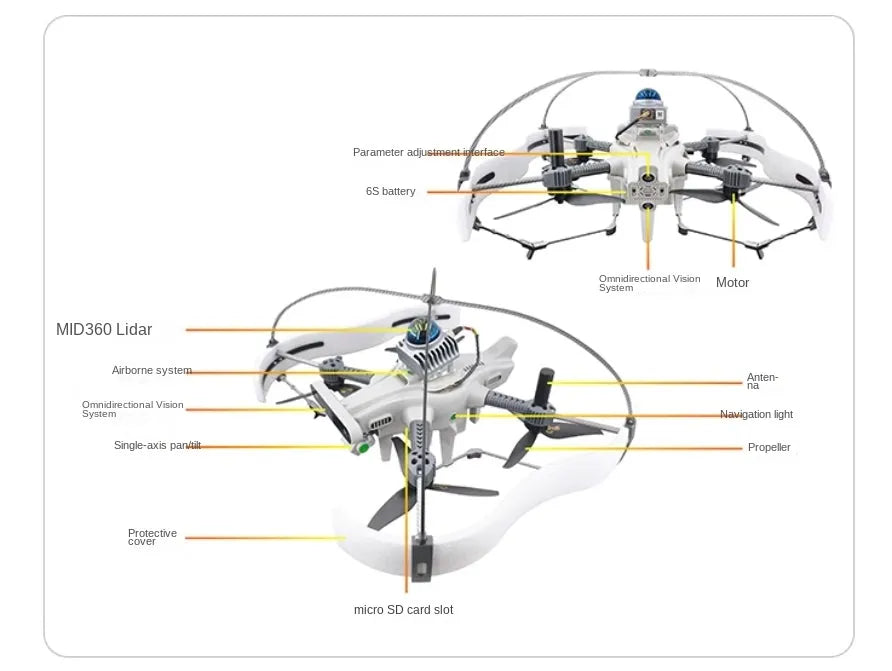
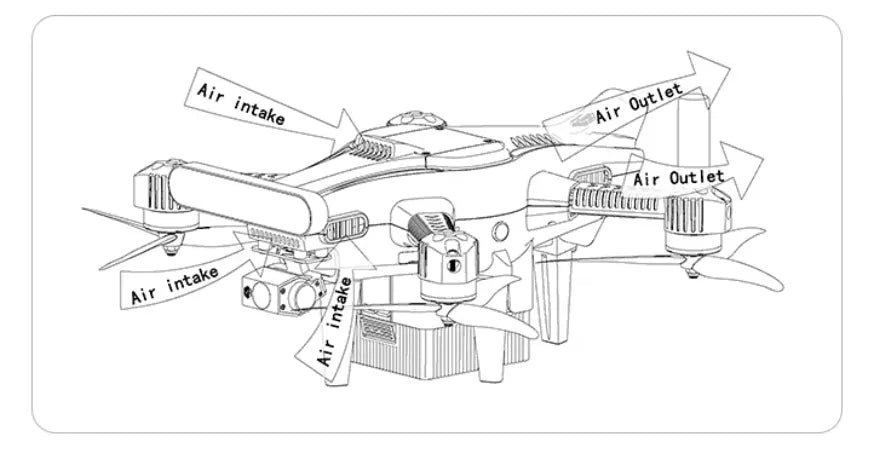
المكونات الهيكلية لطائرة الأبحاث SU17، مع التأكيد على استقرارها وتصميمها المتقدم. تتضمن الميزات الرئيسية ليدار MID360 من أجل رسم الخرائط بدقة، نظام الرؤية متعدد الاتجاهات من أجل إدراك بيئي شامل، محور أحادي المحور للحصول على تصوير مستقر وقوي بطارية 6S للحصول على طاقة ممتدة. وتشمل المكونات الأساسية الأخرى نظام المروحة, هوائي, أضواء الملاحة، و أ فتحة بطاقة micro SD لتخزين البيانات. يدمج التصميم أجهزة متطورة، مما يضمن الموثوقية والأداء العالي لمختلف تطبيقات البحث.
Related Collections